本文主要是介绍使用STM32 再实现蓝牙/点动控制小车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
小车的项目之前也已经都做过一遍了,重做一遍的目的是温习STM32学习到的知识点,加深对于不同单片机的理解。
项目需求
让小车可以通过蓝牙控制前后左右移动;或实现点动的控制前后左右移动。
硬件介绍
蓝牙模块HC-01
已经使用过无数次,不过多赘述
电机驱动模块 L9110s
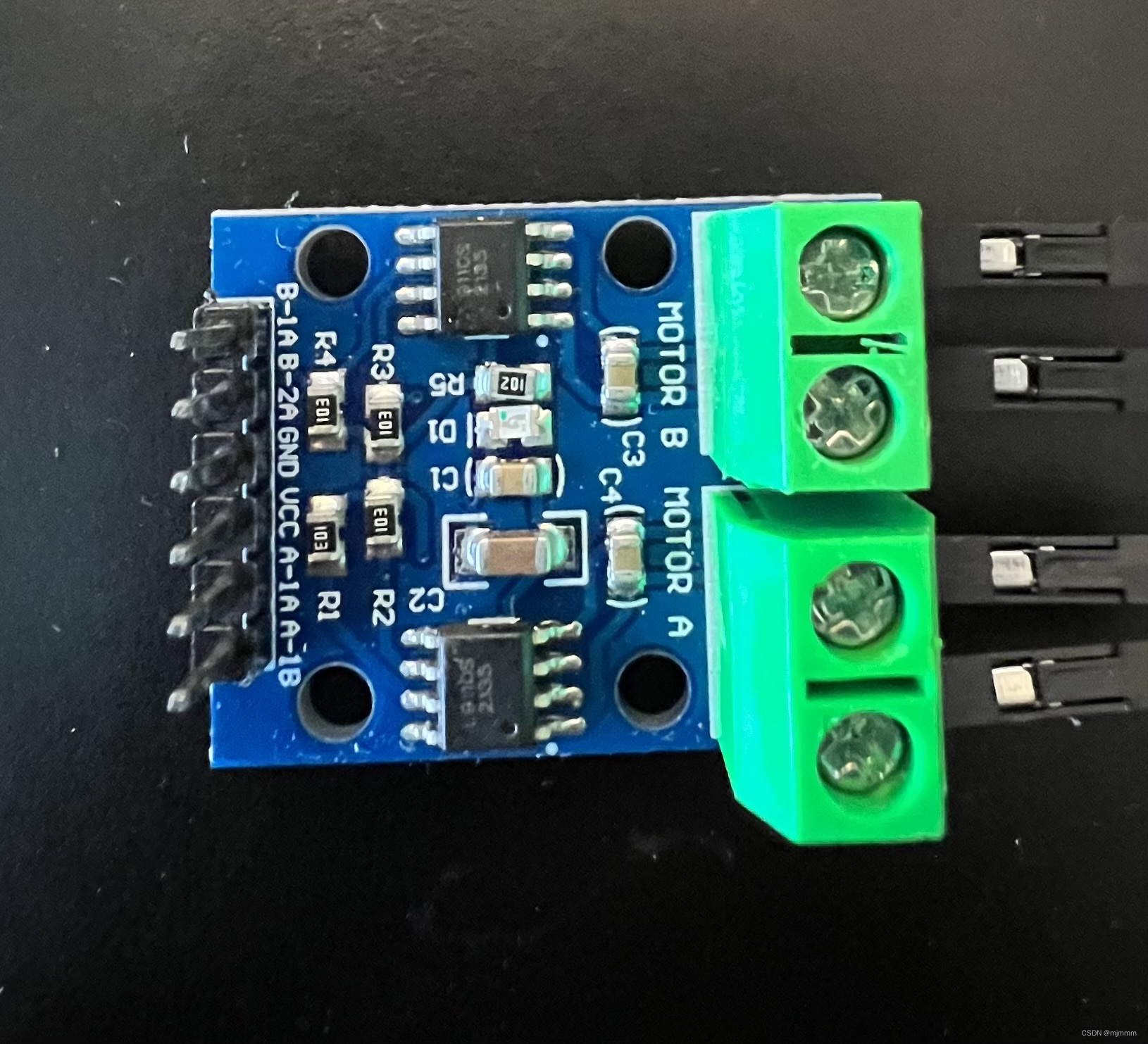
用来驱动小车的两个电机
正转时:B_1A = 0; B_1B = 1; A_1A = 0; A_1B = 1;
反转时:B_1A = 1; B_1B = 0; A_1A = 1; A_1B = 0;
硬件接线
L9110s
- B-1A -> PA0
- B-1B -> PB1 (模块上标成 B-2A了)
- A-1A -> PA1
- A-1B -> PB10
- 小车别忘了连一根线和 L9110s 共地
HC-01
- VCC --> 5v
- GND --> GND
- RXD --> TX1
- TXD --> RX1
CubeMX
1. 惯例配置 + 打开串口1 + 打开串口中断
2. 惯例配置生成代码:

Keil
1. 打开microlib
2. 在 C:\mjm_CubeMX_proj\mjm_smartcar_proj\Core\Src 目录下创建 motor.c 和 motor.h
2. 编写代码:
motor.c:
#include "motor.h"
#include "gpio.h"#define left_B_1A_HIGH HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET)
#define left_B_1A_LOW HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET)#define left_B_1B_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET)
#define left_B_1B_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET)#define right_A_1A_HIGH HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET)
#define right_A_1A_LOW HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET)#define right_A_1B_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_SET)
#define right_A_1B_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET)void move_backward(void) //后退
{left_B_1A_HIGH;left_B_1B_LOW;right_A_1A_HIGH;right_A_1B_LOW;
}void move_forward(void) //前进
{left_B_1A_LOW;left_B_1B_HIGH;right_A_1A_LOW;right_A_1B_HIGH;
}void move_leftturn(void) //左转
{left_B_1A_LOW; //左轮不动left_B_1B_LOW;right_A_1A_LOW; //右轮往前right_A_1B_HIGH;
}void move_rightturn(void) //右转
{left_B_1A_LOW; //左轮往前left_B_1B_HIGH;right_A_1A_LOW; //右轮不动right_A_1B_LOW;
}void move_stop(void) //停止
{left_B_1A_LOW;left_B_1B_LOW;right_A_1A_LOW;right_A_1B_LOW;
}motor.h:
#ifndef __motor_H__ // "XXXX"就是h文件的名字
#define __motor_H__void move_backward(void);
void move_forward(void);
void move_leftturn(void);
void move_rightturn(void);
void move_stop(void);#endif main.c:
#include "stdio.h"
#include "string.h"
#include "motor.h"#define UART1_REC_LEN 200 //定义最大接收字节数 200,可根据需求调整uint8_t buf=0; //串口接收缓存(1字节)
uint8_t UART1_RX_Buffer[UART1_REC_LEN];//接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节uint16_t UART1_RX_STA=0; //bit15,接收完成标志 //bit14,接收到0x0d //bit13~0,接收到的有效字节数目void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) // 接收完成回调函数,每收到一个字符(字节)后,就会在这里处理
{if(huart->Instance == USART1){ // 判断中断是由哪个串口触发的if((UART1_RX_STA & 0x8000) == 0){ // 判断接收是否完成(UART1_RX_STA bit15 位是否为1)if(UART1_RX_STA & 0x4000){ // 如果已经收到了 0x0d (回车)// 则接着判断是否收到 0x0a (换行)if(buf == 0x0a){ // 如果 0x0a 和 0x0d 都收到,UART1_RX_STA |= 0x8000; //则将 bit15 位 置为1//程序运行到此处,代表数据已经完整接收,可以开始判断/////if(!strcmp((const char *)UART1_RX_Buffer, "M1")){ //如果strcmp返回0,则说明指令是前进move_forward();}if(!strcmp((const char *)UART1_RX_Buffer, "M2")){ //如果strcmp返回0,则说明指令是后退move_backward();}if(!strcmp((const char *)UART1_RX_Buffer,"M3")){ //如果strcmp返回0,则说明指令是左转move_leftturn();}if(!strcmp((const char *)UART1_RX_Buffer,"M4")){ //如果strcmp返回0,则说明指令是右转move_rightturn();}if(!strcmp((const char *)UART1_RX_Buffer,"M5")){ //如果strcmp返回0,则说明指令是停止move_stop();}memset(UART1_RX_Buffer, 0, UART1_REC_LEN); //重要!UART1_RX_STA = 0;//重要!///}else{ // 否则认为接收错误,重新开始UART1_RX_STA = 0;}}else{ // 如果没有收到 0x0d (回车)//则先判断收到的这个字符是否是 0x0d (回车)if(buf == 0x0d){ // 是的话则将 bit14 位置为1UART1_RX_STA |= 0x4000;}else{ // 否则将接收到的数据保存在缓存数组里UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf; //因为UART1_RX_STA只有前14位为有效数据,所以缓存数组UART1_RX_Buffer[X]中的X作为16位的二进制数,最高两位的判断应该写在前面代码的判断中,在此处不用UART1_RX_STA++;if(UART1_RX_STA > UART1_REC_LEN - 1){ //如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收UART1_RX_STA = 0;}}}}HAL_UART_Receive_IT(&huart1, &buf, 1); // 重新开启中断}
}int fputc(int a, FILE *f) //一个字符一个字符发送
{unsigned char temp[1] = {a};HAL_UART_Transmit(&huart1, temp, 1, 0xffff);return a;
}int main(void)
{HAL_UART_Receive_IT(&huart1, &buf, 1);//开启中断,并把数据存到buf里while (1){printf("smart car\r\n");HAL_Delay(1000);}
}实现效果
打开安卓手机的蓝牙APP,设置自定义按钮:
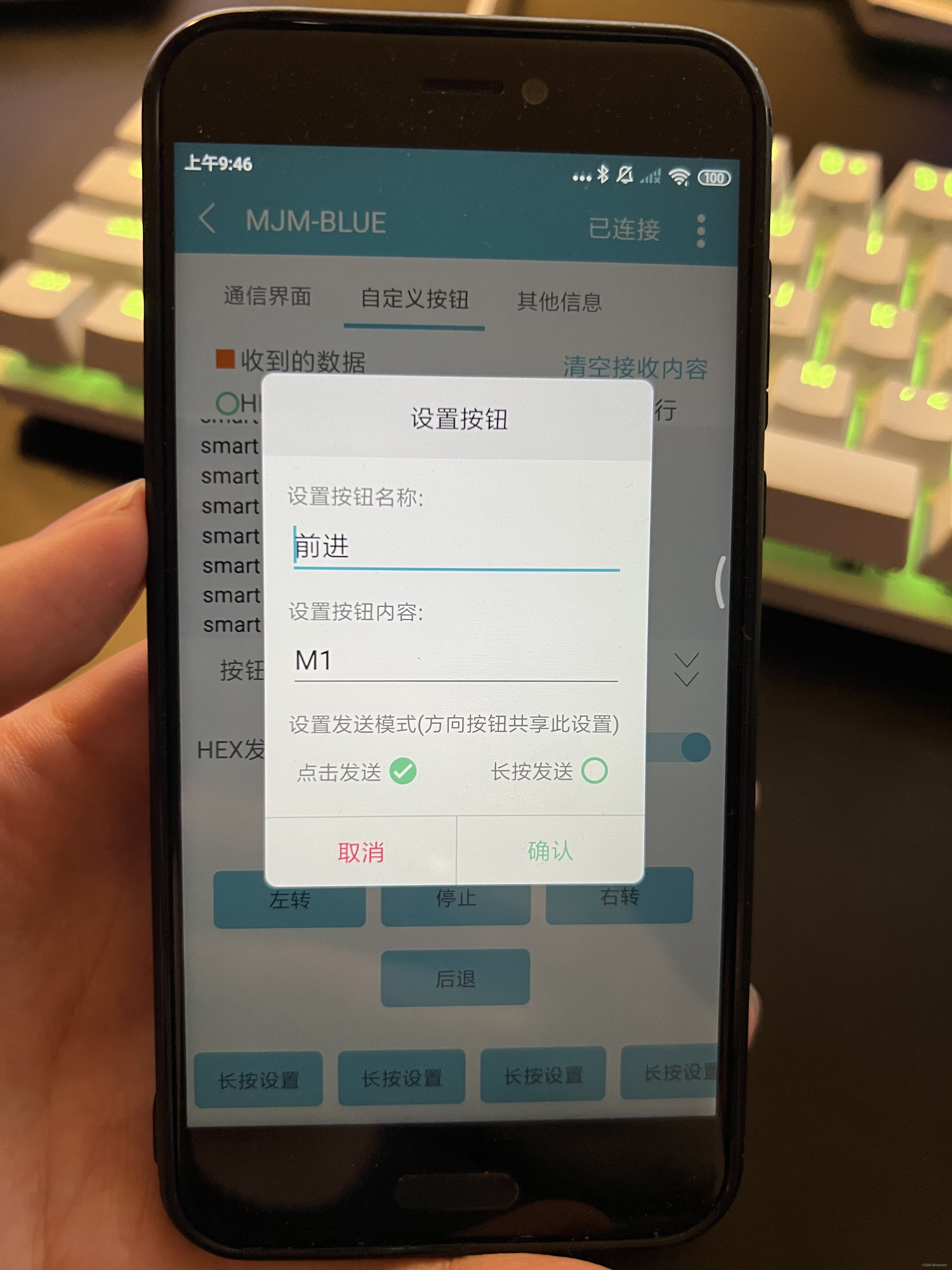
以上图同样的方式绑定 M2 --> 后退; M3 --> 左转; M4 --> 右转; M5 --> 停止

然后选择“发送新行”:

可见,在不断接收到串口心跳包的同时,可以通过按钮控制小车的前后左右运动!
点动控制小车
但是,上图这样依然没有解决之前的痛点,即没法像遥控小车一样,按下方向键就走,不按就停,为了实现这个效果,首先需要修改CubeMX 和 main.c中的代码:
CubeMX:
![]()
main.c:
#include "stdio.h"
#include "string.h"
#include "motor.h"#define UART1_REC_LEN 200 //定义最大接收字节数 200,可根据需求调整uint8_t buf=0; //串口接收缓存(1字节)
uint8_t UART1_RX_Buffer[UART1_REC_LEN];//接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节uint16_t UART1_RX_STA=0; //bit15,接收完成标志 //bit14,接收到0x0d //bit13~0,接收到的有效字节数目void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) // 接收完成回调函数,每收到一个字符(字节)后,就会在这里处理
{if(huart->Instance == USART1){ // 判断中断是由哪个串口触发的if((UART1_RX_STA & 0x8000) == 0){ // 判断接收是否完成(UART1_RX_STA bit15 位是否为1)if(UART1_RX_STA & 0x4000){ // 如果已经收到了 0x0d (回车)// 则接着判断是否收到 0x0a (换行)if(buf == 0x0a){ // 如果 0x0a 和 0x0d 都收到,UART1_RX_STA |= 0x8000; //则将 bit15 位 置为1//程序运行到此处,代表数据已经完整接收,可以开始判断/////if(!strcmp((const char *)UART1_RX_Buffer, "M1")){ //如果strcmp返回0,则说明指令是前进move_forward();HAL_Delay(10);}if(!strcmp((const char *)UART1_RX_Buffer, "M2")){ //如果strcmp返回0,则说明指令是后退move_backward();HAL_Delay(10);}if(!strcmp((const char *)UART1_RX_Buffer,"M3")){ //如果strcmp返回0,则说明指令是左转move_leftturn();HAL_Delay(10);}if(!strcmp((const char *)UART1_RX_Buffer,"M4")){ //如果strcmp返回0,则说明指令是右转move_rightturn();HAL_Delay(10);}if(!strcmp((const char *)UART1_RX_Buffer,"M5")){ //如果strcmp返回0,则说明指令是停止move_stop();}memset(UART1_RX_Buffer, 0, UART1_REC_LEN); //重要!UART1_RX_STA = 0;//重要!///}else{ // 否则认为接收错误,重新开始UART1_RX_STA = 0;}}else{ // 如果没有收到 0x0d (回车)//则先判断收到的这个字符是否是 0x0d (回车)if(buf == 0x0d){ // 是的话则将 bit14 位置为1UART1_RX_STA |= 0x4000;}else{ // 否则将接收到的数据保存在缓存数组里UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf; //因为UART1_RX_STA只有前14位为有效数据,所以缓存数组UART1_RX_Buffer[X]中的X作为16位的二进制数,最高两位的判断应该写在前面代码的判断中,在此处不用UART1_RX_STA++;if(UART1_RX_STA > UART1_REC_LEN - 1){ //如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收UART1_RX_STA = 0;}}}}HAL_UART_Receive_IT(&huart1, &buf, 1); // 重新开启中断}
}int fputc(int a, FILE *f) //一个字符一个字符发送
{unsigned char temp[1] = {a};HAL_UART_Transmit(&huart1, temp, 1, 0xffff);return a;
}int main(void)
{HAL_NVIC_SetPriority(SysTick_IRQn,0,0);HAL_UART_Receive_IT(&huart1, &buf, 1);//开启中断,并把数据存到buf里while (1){move_stop();}
}然后,打开电脑的串口助手:
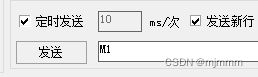
然后选择定时发送10ms一次,发送M1,这样就会不断触发中断,即前进延时10ms,然后再次进入中断继续前进;一旦取消发送,就会进入主函数的while(1),即小车立刻停下,这就实现了点动的控制小车。
所以如果能集成一个开关,按下开关就每隔10ms连续发送指令,就可以实现真正的点动,可惜蓝牙助手暂时没有这个功能,以后如果学习到了APP的开发,或许就可以完美的解决这个问题。
这篇关于使用STM32 再实现蓝牙/点动控制小车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






