本文主要是介绍vSLAM中IMU预积分的作用--以惯性导航的角度分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。
在接触了vSLAM的更多内容后,站在历史研究者的角度去分析,得到了一个更为清晰的作用分析。
首先,需要明确IMU与相机这两种传感器的互补作用,这是为什么要用IMU的原因。直接贴出程博书中的内容,总结的比较全面了。
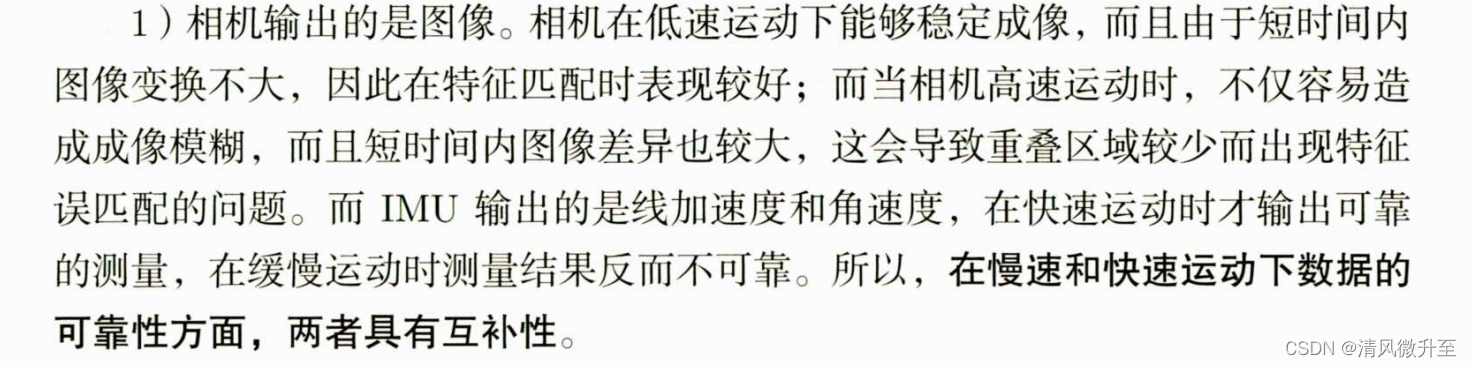
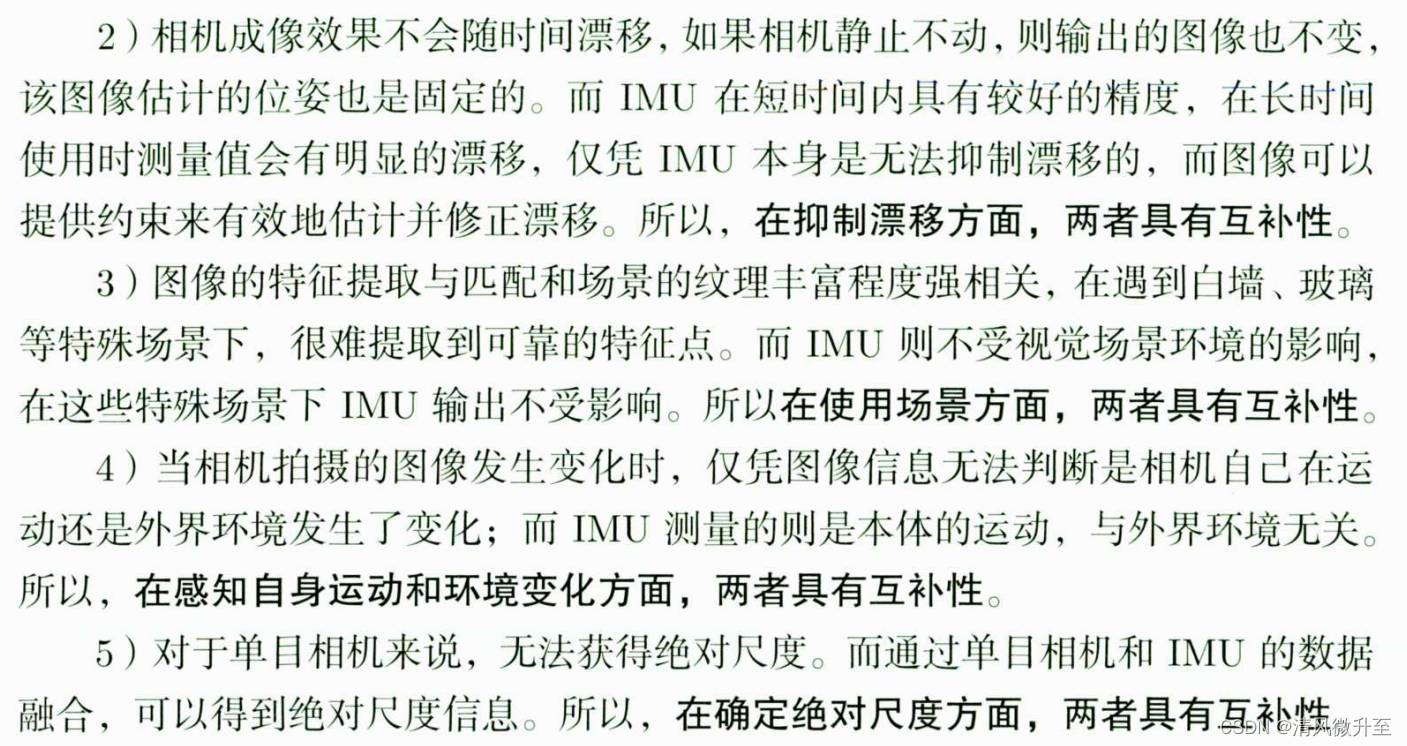
总之,就是相机成像的缺点可以由IMU来解决,IMU可以起到很好的辅助作用。此外,IMU漂移的缺点,也会被相机抑制。二者优势互补,劣势互容,相机+IMU进行组合使用,可以得到比单独一种传感器更好的位姿估计。
其次,需要考虑如何使用IMU数据。
对于该问题,程博在书中提到了两种思路,分别为松耦合和紧耦合。
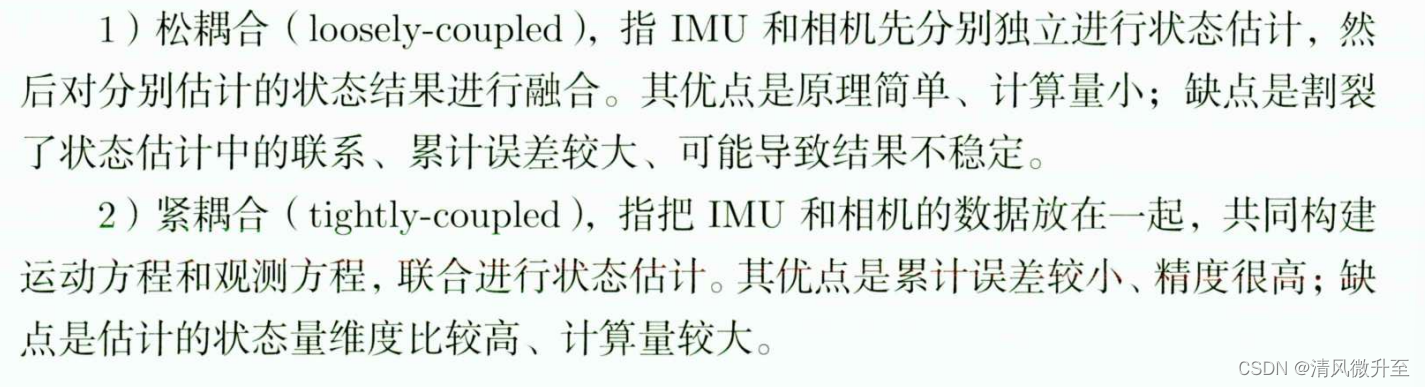
在上面的松耦合方案中,用KF实现的话,就是二者位姿作差,送到KF中进行更新,相当于ins/gps的松耦合方案。对于优化思路的话,二者位姿作差,最小化该残差模值的和即可。这样做的话,用起来就是单帧更新,两图像帧之间的约束就无法纳入到考虑中,也就是图上所说的割裂了状态估计的联系。这是一种较低层次的融合。说起来,这种方法感觉更像是以相机辅助IMU。
紧耦合方案的话,滤波方向可以看看MSCKF等方案。但对于优化方向,以VINS为例,可以将两个关键帧之间的IMU积分,积分所得的"广义位速姿bias增量”作为图优化的“边”,从而限制两个关键帧之间位速姿bias的变化量。真正执行时,优化迭代过程中,两个关键帧的位姿进行广义减法可以得到"广义位速姿bias增量”的估计值,而IMU积分得到“广义位速姿bias增量”的测量值,由二者相减可得残差项。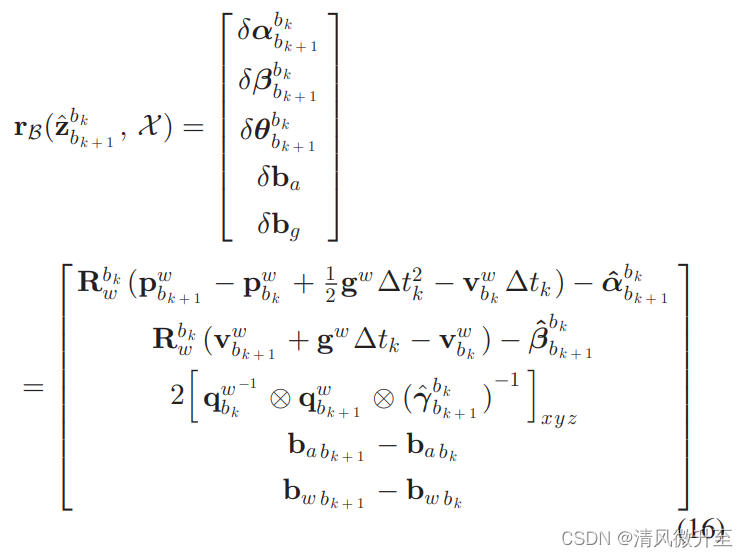
注意上图中,IMU积分认为bias一阶导为0(只剩下高斯白噪声),积分就不必了,增量默认就是0了。所以相减的话,也只有优化得到的bias增量剩下了。
预积分的“预”字含义就是,在优化的多次迭代过程中,两关键帧间的IMU积分(所得的广义位姿增量)是基本不变的,可以预先积分好直接在整个优化过程中去用。即便bias变化,还有相应的一阶雅克比近似去更新预积分,除非bias变化较大,那就需要对(两关键帧间)每个IMU都积分一遍才能得到相应的位速姿变化量了。
这篇关于vSLAM中IMU预积分的作用--以惯性导航的角度分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







