本文主要是介绍粒子滤波器/卡尔曼滤波局限/状态空间模型/蒙特卡罗方法/重要性采样/重要密度函数/重采样/粒子退化 的核心思想+ Matlab代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
--》是递归贝叶斯滤波的一种实现
--》以高计算量为代价换取能表示任何一种分布形式
--》用随机样本表示,用一组加权样本表示后验
--》在局部化的背景下,粒子根据运动模型进行传播,然后根据观察结果的可能性对它们进行加权,在重新采样的步骤中,新粒子的绘制概率与观察到的可能性成正比
--》从存储成本和对不断变化的信号特性的快速适应的角度来看,可以实现数据到达时进行实时处理
--》用于对非线性( nonlinear )非高斯(non-Gaussian)模型的估计
粒子滤波器思想:用测量更新权重,根据权重来重采样,用模型来在空间转移粒子。
目标跟踪问题/状态空间模型
h表示对真实值x的一种有规律的扭曲,所以观测是扭曲过的真实加上噪声。
关于系统模型:为什么只用系统模型不能完全表征目标的方位?--》因为由噪声:在GPS中可以理解为汽车的飘移或者因为违停而被脱走的汽车(绑架机器人)。
说到噪声,这里提一下最小二乘的思想:对于线性模型: y=h*x+v , 很自然的想到,我们要想获得最准确的估计值,我们可以求Σ(y-h*x)^2,当它达到最小时,我们的估计值最接近真实值,这里可以理解为一种对(向量)x的遍历,然后让真实值和我们的观测相匹配。
卡尔曼滤波器的局限
卡尔曼滤波器利用了高斯分布是共轭分布的性质,或者说高斯分布是一个能被参数化的分布,粒子滤波器是对非参数化分布的一种表示形式。当模型和数据是非线性时,用卡尔曼滤波器会得到一些奇怪的非高斯分布。一些算法可以将非线性系统投影成线性系统。
蒙特卡洛方法(Monte Carlo method):
蒙特卡洛方法是一种对随机变量数字特征的估计方法,可以简单理解为他是在样点和参数之间的一种转换:
从概率分布产生样点《——》从样点建立参数分布
概率质量函数(Probability mass function):正因为这样才能代表非高斯分布——那些不能用公式准确描述形容的分布,通过散点避免了线性的问题。
重要性采样( Importance Sampling ):
核心思想:形容如何给点赋予权值。
Q是已知的分布,也叫重要性概率密度函数。
权重的积分为1(归一化),粒子点数越多,对概率的拟合程度越好,当点数无限多时,概率质量分布PMF就是概率分布PDF了。
我们知道粒子滤波器用加权粒子来表示概率分布,那么我们如何获得这些粒子呢?
如果是某分布高斯分布,由于它是参数化的方法,会有其专门的生成算法,比如想生成10个符合标准正态分布N~(0,1)的粒子,可以用matlab函数: 1*randn(1,10);
那其他分布呢?我们这时就用到了importance sampling
通过产生一个已知的参数化分布,然后考虑这个已知的参数分布和未知非参数化分布(目标)的差异——即是权重,具体做法是:
权重w(i)=非参数化分布在某处的值p(i)/参数化已知分布对应的值q(i)
这样用参数化已知分布*权重即是非参数化目标分布对应的概率密度(或者说是分布),所以以这种方法可以生成对应分布的点。
权重相当于对已知概率分布进行变形。
对于目标运动模型,我们可以基于运动和观察,通过预测步骤从这个容易发生样本参数化分布q中抽取样本,我可以很。
通过系统运动模型和观测模型,预测(prediction)通过系统运动模型,从容易建立样点、已知的参数分布产生点;然后用观测方程来作更正(correction)
W(tj)=target(tj)/proposal(tj),这里tj=ki,k次i个,重采样就是要利用大权重(概率)的点来生成下一次的点,而舍弃那些权重小的点。
简单来说,就是通过已知参数分布(高斯)来生成点,然后根据非参数分布的对应点的PMF和高斯对应位置的PDF之间的差异(权重w)来给生成的这些点来赋值,此时要注意对应关系。
重要密度函数q的选择(Good Choice of Importance Density)
重要密度函数的作用:概率转移、后验搬移,可以理解为一种对概率密度(点的权重)刷新的方法。
选择重要性概率密度函数的一个标准是使得粒子权值{w(k)(i)}(i=1:N)的方差最小,这表示的是“不确定中的确定性”的含义。
通常可以选择状态变量的转移概率密度函数p(x(k) | x(k-1))作为重要性概率密度函数q,此时粒子的权值是:
w(k)(i) = w(k-1)(i) * p(y(k) | x(k)(i))
这个式子中的w是权值,p可以理解为贝叶斯公式中的似然函数,这里是用围绕观测y产生的“似然函数”将对应粒子的权值进行刷新。
因此通过q围绕着观测y生成的,而w衡量了q与通过系统运动模型生成的p的关系,可以近似理解为他俩越接近的点的权值越大.
重采样方法(Resampling)
核心思想:让我们的概率密度分布更加紧凑地分布于可能性更大地点上.
需要重采样是因为本质上是因为我们的点数是有限的(由于计算机的计算能力有限,我们只能表示有限个点),当有些粒子去了概率为0(权值低)的区域时,我们就认为它们不好(Bad),所以我们应该将Bad点舍弃,而保留那些在概率高的(权值高的)区域的点,并且新生成的点被赋予相同权值,然后开始下一次递归。这就是所谓的适者生存——“survival of the fittest principle”.
如果点数无穷、计算能力无穷的话就不存在resample,因为假设只有1%的点是有效点的话,有效点的数量为(0.01*∞)=∞,依旧能保持点数的丰富性,而点数有限。而如果计算能力有限、点数有限还不重采样的话,那么就无法长时间分析系统(跟踪目标),因为这种情况下粒子滤波器会发散,发散的原因是误差积累,每一次进行计算生成点时都会产生误差,这些误差会积累并且不可逆(无法恢复),除非有无限个点。
举个例子:考虑函数y=x^100,若x是连续的话,则点数也连续,即不存在误差(可以认为连续情况属于一种遍历,把有噪声作用的情况也遍历了),而若x是离散的话,本来x=2处的点对应y=2^100,这时有了0.1的误差,y=(2.1)^100,这种误差是非常大的,而且你下一次计算时还会有新误差,这两次误差一积累,就会造成更大的误差。
粒子退化(sample impoverishment)
粒子退化与权值退化的区别:权值退化是说计算量的问题,减少无效计算,而粒子退化是形容多样性。
粒子滤波器Matlab仿真效果和代码

%%
clear all
close all
clc
%% 初始化变量
set(0,'DefaultFigureWindowStyle','docked')
x = 0.1;
x_N = 1;
x_R = 1;
T = 75;
N = 100;
V = 2;
x_P = [];
for i = 1:N%围绕x=0.1生成先验粒子
x_P(i) = x + sqrt(V) * randn;
end
figure(1)
clf
subplot(121)
plot(1,x_P,'.k','markersize',5)
xlabel('time step')
ylabel('flight position')
subplot(122)
hist(x_P,100)
xlabel('flight position')
ylabel('count')
pause
z_out = [x^2 / 20 + sqrt(x_R) * randn];
x_out = [x];
x_est = [x];
x_est_out = [x_est];
%把均值当作估计值
for t = 1:T
x = 0.5*x + 25*x/(1 + x^2) + 8*cos(1.2*(t-1)) + sqrt(x_N)*randn;%真实非线性运动方程
z = x^2/20 + sqrt(x_R)*randn;%我们通过观测方程观测
%Here, we do the particle filter,生成点
for i = 1:N
% 根据上一次的N个粒子(prior)x_P,和非线性控制,生成下一次的粒子
x_P_update(i) = 0.5*x_P(i) + 25*x_P(i)/(1 + x_P(i)^2) + 8*cos(1.2*(t-1)) + sqrt(x_N)*randn;
%根据x_P_update和观测方程生成对应观测z_update
z_update(i) = x_P_update(i)^2/20;
%虽然观测到了z,但是不能认为z就是真实值,用观测真值z计算每个z_update中粒子的权重,权值赋予依据是似然函数q,算是一种对产生点的考核
P_w(i) = (1/sqrt(2*pi*x_R)) * exp(-(z - z_update(i))^2/(2*x_R));
end
P_w = P_w./sum(P_w);
%画出由上一次的粒子生成的点和由观测方程生成的每个点的观测
figure(1)
clf
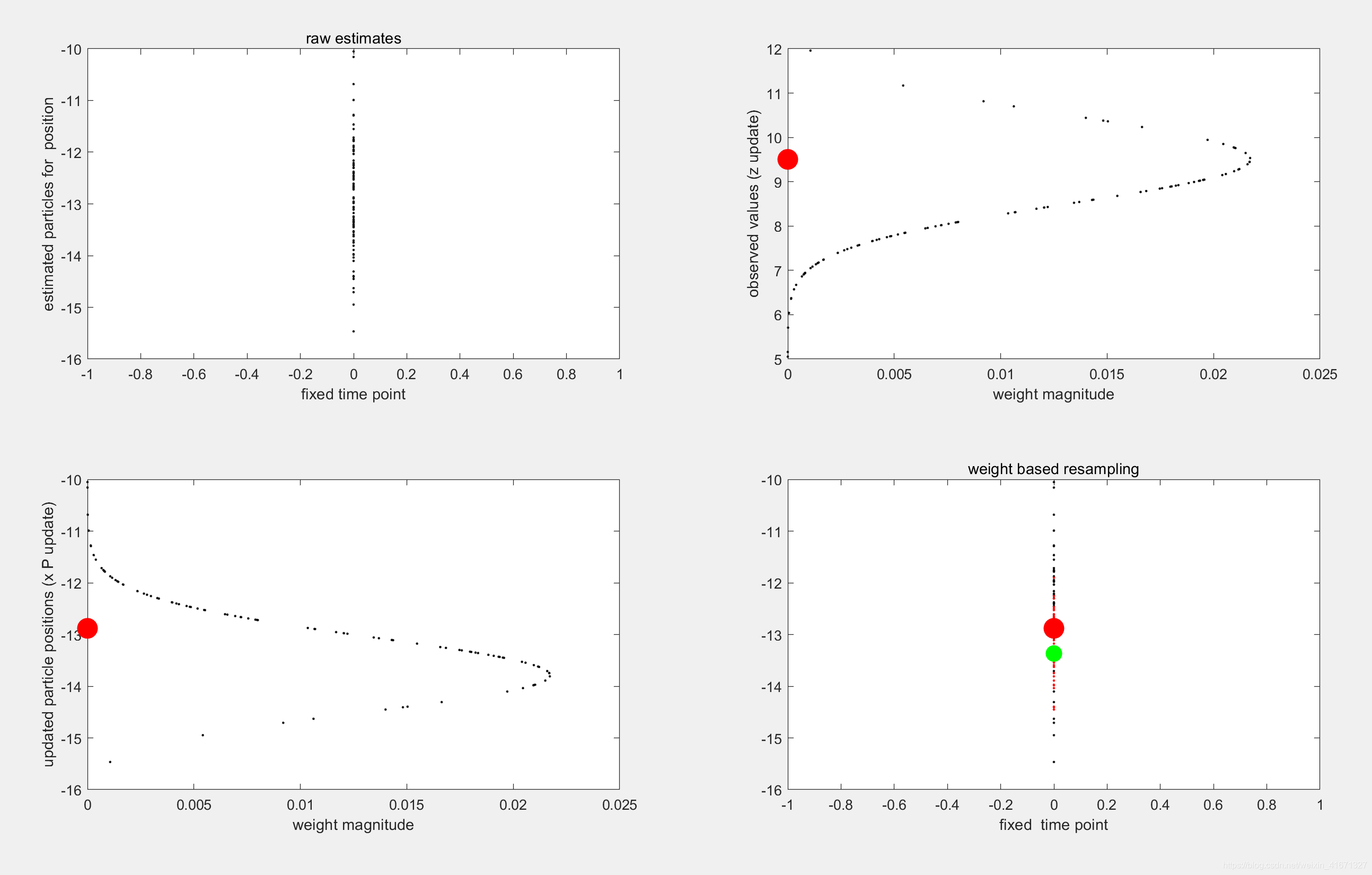
subplot(221)
plot(0,x_P_update,'.k','markersize',5)
title('raw estimates')
xlabel('fixed time point')
ylabel('estimated particles for position')
subplot(222)%对应粒子的权重
plot(P_w,z_update,'.k','markersize',5)
hold on
plot(0,z,'.r','markersize',50)
xlabel('weight magnitude')
ylabel('observed values (z update)')
subplot(223)%粒子的权重
plot(P_w,x_P_update,'.k','markersize',5)
hold on
plot(0,x,'.r','markersize',50)
xlabel('weight magnitude')
ylabel('updated particle positions (x P update)')
%% 重采样
for i = 1 : N
x_P(i) = x_P_update(find(rand <= cumsum(P_w),1))%这是一种方法:计算累加权重值,令其大于随机数,在平均意义上剔除小的权值所所对应的x_P_update
end
x_est = mean(x_P);%对重采样后的点均值作为估计
subplot(224)%
plot(0,x_P_update,'.k','markersize',5)%重采样前的点用黑色小点画出
hold on
plot(0,x_P,'.r','markersize',5)%重采样后的点用红色小点点画出
plot(0,x,'.r','markersize',50)%仿真的真实值值用绿色大点画出
plot(0,x_est,'.g','markersize',40)%我们的估计值用绿色大点画出
xlabel('fixed time point')
title('weight based resampling')
x_out = [x_out x];
z_out = [z_out z];
x_est_out = [x_est_out x_est];
drawnow;
end
t = 0:T;
figure(1);
clf
plot(t, x_out, '.-b', t, x_est_out, '-.r','linewidth',3);%真实轨迹和我们的估计轨迹
set(gca,'FontSize',12); set(gcf,'Color','White');
xlabel('time step'); ylabel(' position');
legend('True position', 'Particle filter estimate');
这篇关于粒子滤波器/卡尔曼滤波局限/状态空间模型/蒙特卡罗方法/重要性采样/重要密度函数/重采样/粒子退化 的核心思想+ Matlab代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




