本文主要是介绍ROS smach-----状态之间传递用户数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 定义用户数据
有时可能需要给某个状态提供一些输入数据,而且该状态也可能需要输出一些数据给其它状态使用。这些输入和输出数据可以称为userdata 。
class Foo(smach.State):def __init__(self, outcomes=['outcome1', 'outcome2'],input_keys=['foo_input'],output_keys=['foo_output'])def execute(self, userdata):# Do something with userdataif userdata.foo_input == 1:return 'outcome1'else:userdata.foo_output = 3return 'outcome2'
-
input_keys 列表是该状态需要输入的数据。execute方法使用 userdata结构拷贝。该状态可以读取列举的 在input_keys列表的所有userdata数据字段, 但是不能向这些字段写东西
-
output_keys列表是该状态所有输出数据。该状态可以写output_keys中列举的任何userdata字段。

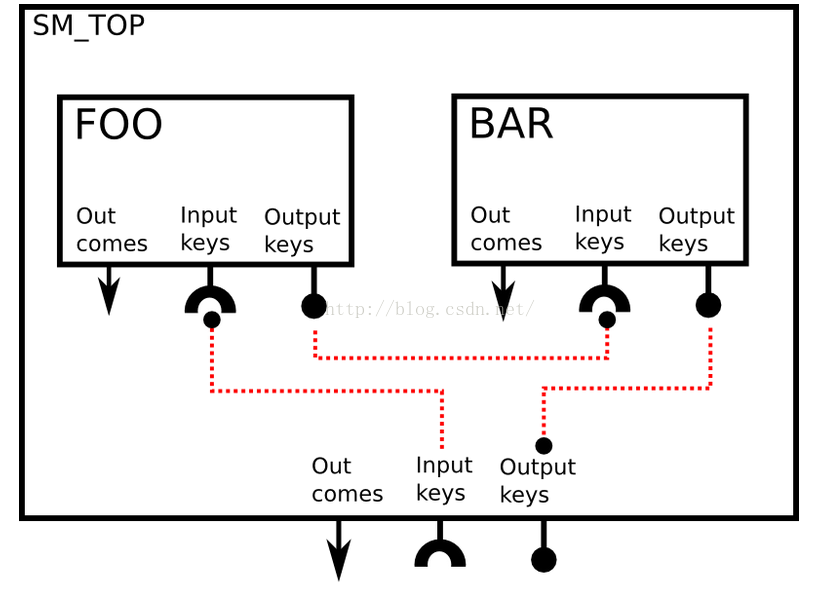
2 连接用户数据
当向状态机添加状态时候,你可以映射userdata字段。例如,如果状态FOO输出数据 'foo_output', 而同时状态BAR 需要输入'bar_input', 那么你可将通过名字讲userdata相关字段连接到一起:
sm_top = smach.StateMachine(outcomes=['outcome4','outcome5'],input_keys=['sm_input'],output_keys=['sm_output'])with sm_top:smach.StateMachine.add('FOO', Foo(),transitions={'outcome1':'BAR','outcome2':'outcome4'},remapping={'foo_input':'sm_input','foo_output':'sm_data'})smach.StateMachine.add('BAR', Bar(),transitions={'outcome2':'FOO'},remapping={'bar_input':'sm_data','bar_output1':'sm_output'})
字段remapping映射状态的in/output_key到状态机的userdata字段。因此,当映射 'x':'y'时候:
- x 是状态的一个input_key 或者一个output_key ;
- y 自动成为了状态机的userdata的部分 ;
2.1 状态之间传递数据
我们可以使用remapping机制从状态FOO向状态BAR传递数据,为此当向状态机添加这两种状态时需要使用如下remapping:
- FOO: remapping={'foo_output':'sm_user_data'}
- BAR: remapping={'bar_input':'sm_user_data'}
2.2 状态和状态机之间传递数据
从状态BAR向包含BAR的状态机传递数据
BAR: remapping={'bar_output':'sm_output'}
从状态机向包含状态FOO的状态传递数据
FOO: remapping={'foo_input':'sm_input'}
3 实例解析
#!/usr/bin/env pythonimport roslib; roslib.load_manifest('smach_tutorials')
import rospy
import smach
import smach_ros# define state Foo
class Foo(smach.State):def __init__(self):smach.State.__init__(self, outcomes=['outcome1','outcome2'],input_keys=['foo_counter_in'],output_keys=['foo_counter_out'])def execute(self, userdata):rospy.loginfo('Executing state FOO')if userdata.foo_counter_in < 3:userdata.foo_counter_out = userdata.foo_counter_in + 1return 'outcome1'else:return 'outcome2'# define state Bar
class Bar(smach.State):def __init__(self):smach.State.__init__(self, outcomes=['outcome1'],input_keys=['bar_counter_in'])def execute(self, userdata):rospy.loginfo('Executing state BAR')rospy.loginfo('Counter = %f'%userdata.bar_counter_in) return 'outcome1'def main():rospy.init_node('smach_example_state_machine')# Create a SMACH state machinesm = smach.StateMachine(outcomes=['outcome4'])sm.userdata.sm_counter = 0# Open the containerwith sm:# Add states to the containersmach.StateMachine.add('FOO', Foo(), transitions={'outcome1':'BAR', 'outcome2':'outcome4'},remapping={'foo_counter_in':'sm_counter', 'foo_counter_out':'sm_counter'})smach.StateMachine.add('BAR', Bar(), transitions={'outcome1':'FOO'},remapping={'bar_counter_in':'sm_counter'})# Execute SMACH planoutcome = sm.execute()if __name__ == '__main__':main()
[INFO] [WallTime: 1478505239.574543] State machine starting in initial state 'FOO' with userdata: ['sm_counter']
[INFO] [WallTime: 1478505239.575218] Executing state FOO
[INFO] [WallTime: 1478505239.575714] State machine transitioning 'FOO':'outcome1'-->'BAR'
[INFO] [WallTime: 1478505239.576135] Executing state BAR
[INFO] [WallTime: 1478505239.576547] Counter = 1.000000
[INFO] [WallTime: 1478505239.576917] State machine transitioning 'BAR':'outcome1'-->'FOO'
[INFO] [WallTime: 1478505239.577303] Executing state FOO
[INFO] [WallTime: 1478505239.577718] State machine transitioning 'FOO':'outcome1'-->'BAR'
[INFO] [WallTime: 1478505239.578095] Executing state BAR
[INFO] [WallTime: 1478505239.578463] Counter = 2.000000
[INFO] [WallTime: 1478505239.578850] State machine transitioning 'BAR':'outcome1'-->'FOO'
[INFO] [WallTime: 1478505239.579229] Executing state FOO
[INFO] [WallTime: 1478505239.579621] State machine transitioning 'FOO':'outcome1'-->'BAR'
[INFO] [WallTime: 1478505239.580049] Executing state BAR
[INFO] [WallTime: 1478505239.580421] Counter = 3.000000
[INFO] [WallTime: 1478505239.580770] State machine transitioning 'BAR':'outcome1'-->'FOO'
[INFO] [WallTime: 1478505239.581125] Executing state FOO
[INFO] [WallTime: 1478505239.581510] State machine terminating 'FOO':'outcome2':'outcome4'
这篇关于ROS smach-----状态之间传递用户数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




