本文主要是介绍【记录】使用yolov5_obb训练自己的数据集,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引言
对于寻常的yolov5目标检测任务,只能检测水平或者垂直的检测框,而对于旋转框的检测却无能为力。为此,在这记录下使用yolov5_obb来训练自己数据集。
一、准备数据集
1、我们先看所需要的数据集文件什么样子,如下图文件夹Symbol所示:

images文件夹下是格式为PNG的训练图片,labelTxt下则是对应的txt文件。也就是说我们只需要获取txt文件就行。
2、标注图像
为了能够标注旋转的目标检测框,我们采用rolabelImg工具进行标注,具体教程在我以前的文章有(点个赞收藏下呗):
【教程】安装labelme以及旋转标记工具roLabelimg-CSDN博客文章浏览阅读69次。因为需要标记旋转的目标检测框,所以要用到工具roLabelimg,labelme则更多用来标注图像分割,并且使用roLabelimg的前提是安装labelme。(window环境下)https://blog.csdn.net/qq_39149619/article/details/133987812?spm=1001.2014.3001.55013、xml转换txt
步骤2得到的图像是xml格式的,而训练则需要txt文件,博主在这里给出转换代码如下:
import os
import math
import xml.etree.ElementTree as ET
import numpy as np
import cv2def rotate(cx, cy, w, h, angle):# 用于常规坐标时,angle是顺时针旋转角度# 用于图像坐标时,angle是逆时针旋转角度# math.cos(angle)这里的angle单位是rad# angle = angle/180*math.pi 单位转换angle=-angle#这里是图像坐标points = [[cx-w/2, cy-h/2], [cx+w/2, cy-h/2],[cx+w/2, cy+h/2], [cx-w/2, cy+h/2]]newpoints = []if angle < 0: # 逆时针angle = -anglefor point in points:x, y = pointnewx = round((x-cx)*math.cos(angle) - (y-cy)*math.sin(angle) + cx,1)newy = round((x-cx)*math.sin(angle) + (y-cy)*math.cos(angle) + cy,1)newpoints.append([newx, newy])else:for point in points:x, y = pointnewx = round((x-cx)*math.cos(angle) + (y-cy)*math.sin(angle) + cx,1)newy = round((y-cy)*math.cos(angle) - (x-cx)*math.sin(angle) + cy,1)newpoints.append([newx, newy])return newpointsdef roxml2txt(dir):#dir是xml文件目录files = os.listdir(dir)parentdir,dirname = os.path.split(dir)txtdir=os.path.join(parentdir,'txt')if not os.path.exists(txtdir):os.mkdir(txtdir)for f in files:if f == 'desktop.ini':continuexml_file = open(os.path.join(dir,f), encoding='gbk')root = ET.parse(xml_file).getroot()# xml = ET.parse(os.path.join(dir,f))# root = xml.getroot()boxes = root.iter('robndbox')with open(os.path.join(txtdir,f.split('.')[0]+'.txt'),'w+') as t:for box in boxes:cx = float(box.find('cx').text)cy = float(box.find('cy').text)w = float(box.find('w').text)h = float(box.find('h').text)angle = float(box.find('angle').text)newpoints = rotate(cx, cy, w, h, angle)#计算旋转后的4个点坐标# 用于查看坐标转换是否正确,在原图上画矩形框,自行修改图片路径newpoints=np.array(newpoints)newpoints= newpoints.astype(int)img=cv2.imread(os.path.join('test','images',f.split('.')[0]+'.png'))img=cv2.polylines(img,[newpoints],isClosed=True,color=(0,0,255))cv2.imshow('pic',img)cv2.waitKey()##########################################line=''for point in newpoints:line+=str(point[0])+' '+str(point[1])+' 'line+='word 0\n't.write(line)print(line)t.close()roxml2txt(r'F:\pycharm\person_AI_astional\Script\label_xml')注意修改自己xml文件路径,以及不要忘记建test文件(仔细看代码)。
二、准备代码
1、经过步骤一,我们已经得到能够训练的数据集了(PNG和txt),代码参考的是别的大佬的,这里给出链接:hukaixuan19970627/yolov5_obb: yolov5 + csl_label.(Oriented Object Detection)(Rotation Detection)(Rotated BBox)基于yolov5的旋转目标检测 (github.com)
下载好解压至任意目录,安装所需环境即可。
2、 将数据集放入dataset文件夹下,设置数据集的读取路径。打开data/yolov5obb_demo.yaml文件,修改数据集读取路径(为了方便这里验证集即是训练集,具体根据自己需求更改)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ./dataset # dataset root dir
train: Symbol/images #images # train images (relative to 'path')
val: Symbol/images #images # val images (relative to 'path')
test: Symbol/images #images # test images (optional)# Classes
nc: 1 # number of classes
names: ['symbol'] # class names
3、其他没什么需要修改的,打开train.py文件,执行以下的命令开始训练(具体的参数还得根据你自己需求来):
python train.py --weights weights/yolov5s.pt --data data/yolov5obb_demo.yaml --epochs 100 --batch-size 16 --imgsz 840 --adam三、遇到的问题以及解决方法
1、花时间最多的就是在安装yolov5_obb环境上了,我这里给出一点经验:建议完全遵守作者所给install文件中的安装方法,仔细检查CUDA Driver Version和 CUDA Toolkit Version的版本,并且 CUDA Toolkit Version要小于等于CUDA Driver Version!
说到头也就是你nvidia-smi出来的版本要大于等于nvcc -V出来的版本。另外,python版本建议3.9,不然按照作者那个安装会导致torch下载不下来。
很多人会在python setup.py develop安装nms_rotated出错,基本上都是CUDA Driver Version和 CUDA Toolkit Version两者版本出现问题,仔细检查。另外,pip下载的cu11.3版本,确保CUDA Toolkit Version大于等于11.3,以下是博主的版本:

2、当我们能够正确安装好环境之后,信心满满的执行train.py。结果如下图,chao:
错误说什么labels, shapes, self.segments = zip(*cache.values()) ValueError: not enough values to unpack (expected 3, got 0)
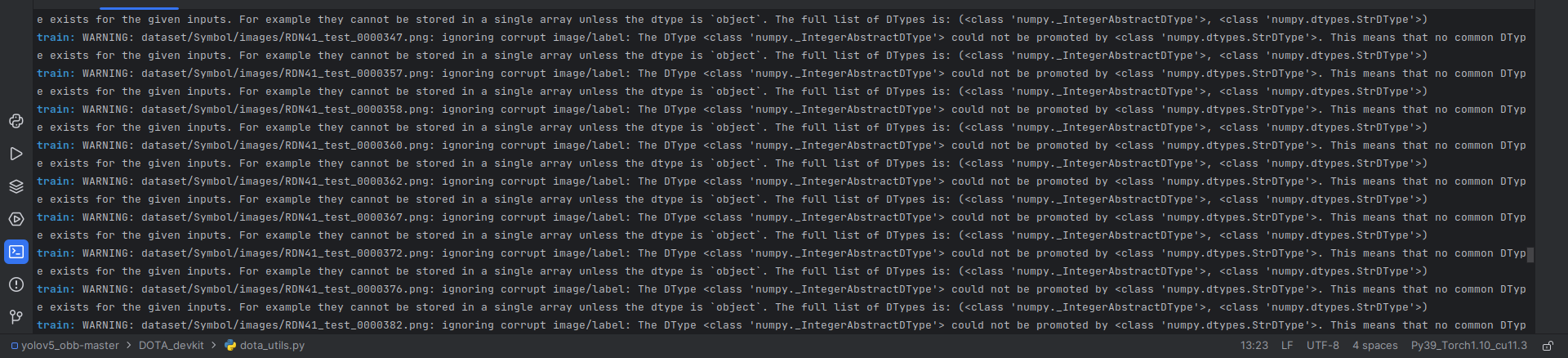
解决方法:是Numpy版本太高的原因,我们执行下面语句降低版本:
pip install numpy==1.22.2最后放一下博主的环境版本信息:


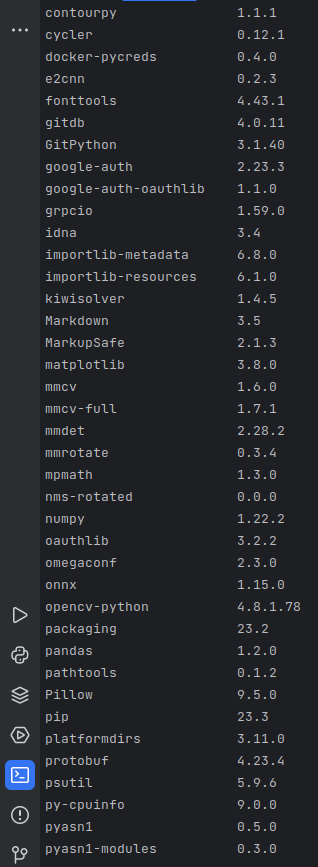
还有其他问题可以评论里留言,我都会解答的!
别忘记收藏点赞!
这篇关于【记录】使用yolov5_obb训练自己的数据集的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






