本文主要是介绍求助!ROS Apriltag 坐标变换 姿位输出,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
各位大神们好,我是机器人领域新手。最近在尝试用Apriltag来进行然后进行跟随。我机器人跟随的时候是用所识别的标签x,y两个坐标轴进行计算。但是在所识别出的标签y轴垂直于标签平面,这样的话计算结果不太正确。 想请问各位大神,标签位置坐标不对的原因。我按照教程在ROS里成功运行了apriltag包得出如果结果:
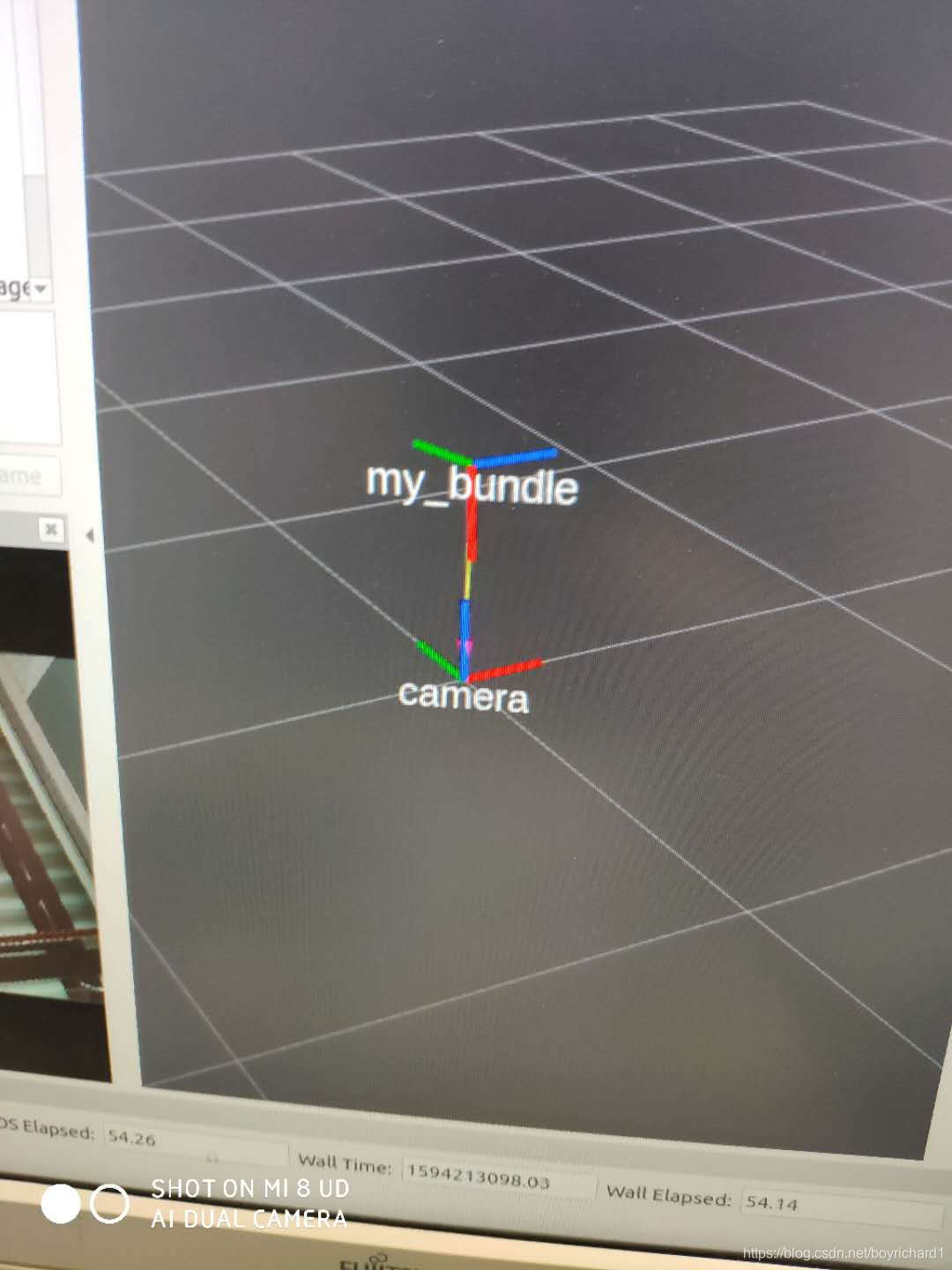
上面的my-bundle红色轴方向垂直于标签。但是网上的结果相机的z轴和标签的z轴是在一个方向上的(如下图)。我只需要用相机的x,y坐标去跟随my-bundle的x,y坐标即可。

求教坐标轴不对的原因,以及简单的解决办法,谢谢
这篇关于求助!ROS Apriltag 坐标变换 姿位输出的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







