本文主要是介绍S32K模拟EEPROM实现单字节和多字节的写入,并实现在一个地址处更新刷写次数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近打算写EEPROM,本着单使用官方手册就搞定这个模拟EEPROM,最后还是借鉴了官方的例程
一、先来看一下我们要操作的内存空间的大小和可操作的地址在哪里?

1)从上图可知S32K148的FlexRAM 的最大空间为4k,所以说他可模拟的EEPROM最大为4k(S32K的EEPROM按字节读取的是由FlexRAM模拟最大4K,S32K的EEPROM按最小扇区2K读取的是由FlexNvm模拟最大64K)


2)从上面两张图可以看出来我们要操作的EEPROM的首地址是在0X14000000
二、了解最基本的内存知识后,下来我们看一下操作FLASH寄存器的具体步骤

这个流程图是关于Flash操作寄存器的通用步骤,这个你可以仔细看S32DS生成的驱动代码,都是按照这个流程图。
三、基本常识就是这些,然后借鉴一下Main.c代码对Flash的操作流程
/* Including necessary module. Cpu.h contains other modules needed for compiling.*/
#include "Cpu.h"volatile int exit_code = 0;/* User includes (#include below this line is not maintained by Processor Expert) *//** Flash选配内存空间分段* */#define BUFFER_SIZE 0x20u /* Size of data source */
#define FLASHaddNUM_ERASE 0#define bool _Bool
#define true 1
#define false 0#define _Bool boolflash_ssd_config_t flashSSDConfig;uint8_t sourceBuffer[BUFFER_SIZE]={1,2,3,4,0,0,7};uint8_t sourceReadBuffer[BUFFER_SIZE]={1,0,0,0,1,0,0,0,1,0,0,0,1,0,0,0,1,0,0,0,1,0,0,0};
/*!\brief The main function for the project.\details The startup initialization sequence is the following:* - startup asm routine* - main()
*/void CCIF_Handler(void);START_FUNCTION_DECLARATION_RAMSECTIONvoid CCIF_Callback(void)END_FUNCTION_DECLARATION_RAMSECTION/* 2020.03.17* 使用FlexRAM模仿EEPROM* 可以最大分区出4k的EEPROM空间,并且内存可按照单个字节进行读取** */
int main(void)
{/* Write your local variable definition here */status_t ret; /* Store the driver APIs return code */uint32_t address;uint32_t size;uint32_t failAddr;flash_callback_t pCallBack;/*** Processor Expert internal initialization. DON'T REMOVE THIS CODE!!! ***/#ifdef PEX_RTOS_INITPEX_RTOS_INIT(); /* Initialization of the selected RTOS. Macro is defined by the RTOS component. */#endif/*** End of Processor Expert internal initialization. ***/CLOCK_SYS_Init(g_clockManConfigsArr, CLOCK_MANAGER_CONFIG_CNT,g_clockManCallbacksArr, CLOCK_MANAGER_CALLBACK_CNT);CLOCK_SYS_UpdateConfiguration(0U, CLOCK_MANAGER_POLICY_AGREEMENT);/* Install interrupt for Flash Command Complete event */INT_SYS_InstallHandler(FTFC_IRQn, CCIF_Handler, (isr_t*) 0); //CCIF_Handler代表了一个形参为void,返回值为void的函数INT_SYS_EnableIRQ(FTFC_IRQn);/* Enable global interrupt */INT_SYS_EnableIRQGlobal();ret =FLASH_DRV_Init(&Flash1_InitConfig0,&flashSSDConfig);DEV_ASSERT(STATUS_SUCCESS == ret);#if 0/*檫除EEPROM的存储空间*/ret = FLASH_DRV_EraseAllBlock(&flashSSDConfig); //实现写命令的流程图中的步骤,将之前刷写的内存全部删除DEV_ASSERT(STATUS_SUCCESS == ret);/* Verify the erase operation at margin level value of 1 */ret = FLASH_DRV_VerifyAllBlock(&flashSSDConfig, 1u);DEV_ASSERT(ret == STATUS_SUCCESS );FLASH_DRV_Init(&Flash1_InitConfig0,&flashSSDConfig);
#endif/* 2020.03.17 分区这个函数必须使用* 选配分出内存分区段* uEEEDataSizeCode FCCOB4 0X2选择4K 的EEPROM空间* uDEPartitionCode FCCOB5 0x8选择64K 的EEPROM空间* uCSEcKeySize FCCOB1 CSEc加密服务选项 无* uSFE FCCOB2 仅验证属性关闭* flexRamEnableLoadEEEData FCCOB3 0 复位期间是否加载数据 加载* */ret=FLASH_DRV_DEFlashPartition(&flashSSDConfig,0x2,0x4,0x0,false,true);DEV_ASSERT(STATUS_SUCCESS==ret);FLASH_DRV_Init(&Flash1_InitConfig0,&flashSSDConfig);/* 2020.03.17* 选配分出内存分区段* flexRamFuncCode FCCOB1 EEE_ENABLE 使能FlexRAM 模拟EEPROM* byteOfQuickWrite FCCOB4 FCCOB5* pEEPROMStatus EEPROM状态 结构体中三个状态* */FLASH_DRV_SetFlexRamFunction(&flashSSDConfig,EEE_ENABLE,0x00,NULL);DEV_ASSERT(STATUS_SUCCESS==ret);#if 1/**尝试写单个字节到EEPROM的内存中**//* Try to write data to EEPROM if FlexRAM is configured as EEPROM */if (flashSSDConfig.EEESize != 0u){address = flashSSDConfig.EERAMBase; //1400 0000size = sizeof(uint32_t);//sourceBuffer[0u] = 0x01;ret = FLASH_DRV_EEEWrite(&flashSSDConfig, address, 1, sourceBuffer);DEV_ASSERT(STATUS_SUCCESS == ret);#if 1/* Verify the written data */if(sourceBuffer[0] != *((uint8_t *)address)){/* Failed to write data to EEPROM */exit_code = 1u;return exit_code;}
#endif#if 0/* Try to update one byte in an EEPROM address which isn't aligned */address = flashSSDConfig.EERAMBase + 1u;size = sizeof(uint8_t);//sourceBuffer[1u] = 0x11u;ret = FLASH_DRV_EEEWrite(&flashSSDConfig, address, 1, sourceBuffer+1);DEV_ASSERT(STATUS_SUCCESS == ret);/* Then verify */if (sourceBuffer[1u] != *(uint8_t *)address){/* Failed to update data to EEPROM */exit_code = 1u;return exit_code;}
#endif/**实现向FlexRAM模拟EEPROM的第四个字节实现刷写更新**/address = flashSSDConfig.EERAMBase+4; //1400 0000size = sizeof(uint32_t);//sourceBuffer[2u] = 0x22u;/*如果地址读出的数据 不等于sourceBuffer5的数据 则更新数据*/if (sourceBuffer[4u] != *(uint8_t *)address){sourceBuffer[4u]=(*(uint8_t *)address)+1;sourceReadBuffer[4]=sourceBuffer[4u];}else if(0==*(uint8_t *)address){sourceBuffer[4u]=(*(uint8_t *)address)+1;sourceReadBuffer[4]=sourceBuffer[4u];}ret = FLASH_DRV_EEEWrite(&flashSSDConfig, address, 1, sourceBuffer+4);DEV_ASSERT(STATUS_SUCCESS == ret);#if 1/* Verify the written data */if (sourceReadBuffer[4] != *(uint8_t *)address){/* Failed to write data to EEPROM */exit_code = 1u;return exit_code;}
#endif/**尝试写多个字节到EEPROM的内存中**/
#if 1address = flashSSDConfig.EERAMBase+0x10; //1400 0000size = sizeof(sourceReadBuffer)/sizeof(sourceReadBuffer[0]);ret = FLASH_DRV_EEEWrite(&flashSSDConfig, address, size, sourceReadBuffer);DEV_ASSERT(STATUS_SUCCESS == ret);/* Verify the written data */if (sourceReadBuffer[0u] != *(uint8_t *)address){/* Failed to write data to EEPROM */exit_code = 1u;return exit_code;}
#endif}
#endif/* Write your code here *//* For example: for(;;) { } *//*** Don't write any code pass this line, or it will be deleted during code generation. ***//*** RTOS startup code. Macro PEX_RTOS_START is defined by the RTOS component. DON'T MODIFY THIS CODE!!! ***/#ifdef PEX_RTOS_STARTPEX_RTOS_START(); /* Startup of the selected RTOS. Macro is defined by the RTOS component. */#endif/*** End of RTOS startup code. ***//*** Processor Expert end of main routine. DON'T MODIFY THIS CODE!!! ***/for(;;) {if(exit_code != 0) {break;}}return exit_code;/*** Processor Expert end of main routine. DON'T WRITE CODE BELOW!!! ***/
} /*** End of main routine. DO NOT MODIFY THIS TEXT!!! ***/START_FUNCTION_DEFINITION_RAMSECTIONvoid CCIF_Callback(void){/* Enable interrupt for Flash Command Complete */if ((FTFx_FCNFG & FTFx_FCNFG_CCIE_MASK) == 0u){FTFx_FCNFG |= FTFx_FCNFG_CCIE_MASK;}}END_FUNCTION_DEFINITION_RAMSECTIONvoid CCIF_Handler(void)
{/* Disable Flash Command Complete interrupt */ // 禁用 flash命令完成中断FTFx_FCNFG &= (~FTFx_FCNFG_CCIE_MASK);return;
}
/* END main */
/*!
** @}
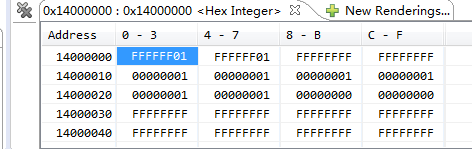
*/主要还是借鉴了S32KDS生成的Demo例程中的具体操作流程。然后就可以实现指定的内存读写,效果如下。
第一次刷写 可以看到0x14000005 数据为00 (这个内存空间的读取是从右往左,低字节到高字节)

第二次刷写 可以看到0x14000005 数据为01
这篇关于S32K模拟EEPROM实现单字节和多字节的写入,并实现在一个地址处更新刷写次数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





