本文主要是介绍关于利用超核HI600D获取UTC时间,经纬度,东经,地面速度,地面航向,日期。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文利用stm32f103vet6开发板+超核HI600D获取一系列信息
1.串口数据
当我们用type-B的数据线连接超核600D,与电脑连接时,打开串口助手,会获取一系列的信息
如图所示:
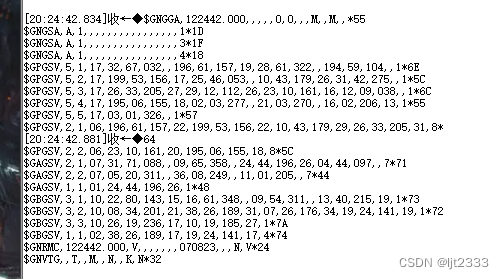
这是未定位的原始数据,我们想要得到有效数据,得在空旷环境或者在有基准站的地方进行定位。
定位后的数据如图:
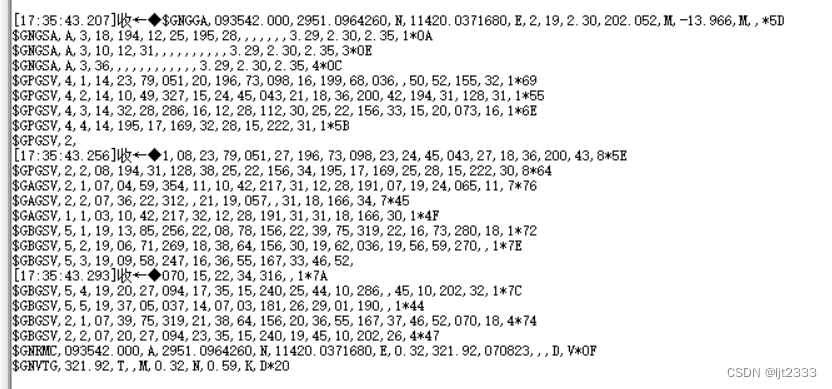
我要读取的是RMC的信息
$GNRMC,044125.000,A,2951.1711260,N,11419.9958340,E,0.12,106.68,070823,,,A,V*03这些数据为NMEA0183 V4.10 协议,如图可见

GGA是接收机的时间、位置和定位相关数据。
GSV是输出可视的卫星状态,包括:可视的卫星数、卫星标识号、仰角、方位角及信噪比(SNR)。
RMC是最简导航传输数据。(也是本文想要读取的数据并解析)
VTG输出地面速度信息。
主要为GGA,GSV,RMC。读者可根据自己的想要的数据来读取想要的NMEA协议,具体见HI600的用户手册。
2.stm32连接超核HI600D的使用
我是stm32f103vet6的开发板+HAL库开发,我也试过超核公司自己hi600的stm32代码,但是烧录进去串口一点反应都没有,可能是芯片型号不对或者是串口没有配置好,官方例程是stm32f103zet6+标准库开发,使用的是串口一和串口二,我是使用的串口一和串口三,将HI600连接到stm32的串口三。
| 超核600 | 连线 | stm32 |
| TX0 | ————> | PB11 |
| RX0 | ————> | PB10 |
| GND | ————> | GND |
| 5V | ————> | 5V |
如图为连线方式
2.1 配置串口
void USART1_Init(unsigned int BPS, void Tx_Over(void), void (*RxFunction)(unsigned char RX_Data))
{GPIO_InitTypeDef GPIO_InitStruct = {0};__HAL_RCC_USART1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE(); Usart_ISR.U1TXOver = Tx_Over; Usart_ISR.U1RXOperation = RxFunction; GPIO_InitStruct.Pin = GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_10;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);huart1.Instance = USART1;huart1.Init.BaudRate = BPS;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); HAL_NVIC_SetPriority(USART1_IRQn, 0, 1);HAL_NVIC_EnableIRQ(USART1_IRQn);
}void USART3_Init(unsigned int BPS, void Tx_Over(void), void (*RxFunction)(unsigned char RX_Data))
{GPIO_InitTypeDef GPIO_InitStruct = {0};__HAL_RCC_USART3_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE(); Usart_ISR.U3TXOver = Tx_Over; Usart_ISR.U3RXOperation = RxFunction; GPIO_InitStruct.Pin = GPIO_PIN_10;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_11;GPIO_InitStruct.Mode = GPIO_MODE_AF_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);huart3.Instance = USART3;huart3.Init.BaudRate = BPS;huart3.Init.WordLength = UART_WORDLENGTH_8B;huart3.Init.StopBits = UART_STOPBITS_1;huart3.Init.Parity = UART_PARITY_NONE;huart3.Init.Mode = UART_MODE_TX_RX;huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart3.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart3) != HAL_OK){Error_Handler();}__HAL_UART_ENABLE_IT(&huart3, UART_IT_RXNE); HAL_NVIC_SetPriority(USART3_IRQn, 0, 1);HAL_NVIC_EnableIRQ(USART3_IRQn);}配置好串口后可自己试验一下,串口三的数据能不能发送到串口一打印。
void ESP_RX_ISR( uint8_t RX_Data)
{esp_recv_buff[esp_rx_index++] = RX_Data;
}因为我是改编8266的代码,所以有些函数的名字没有更改,抱歉,但本质内容不变,这这个函数中,我们获得了最重要的串口三的RX_Data,并存入了esp_recv_buff这个数组里面。
USART1_Send_Poll(esp_recv_buff,esp_recv_len);void USART1_Send_Poll(uint8_t *buff, uint16_t Size)
{uint16_t i;for(i = 0; i < Size; i++){USART1_SendByte(*buff++);}
}void USART1_SendByte(char ch)
{ while((USART1_SR&UART_LSR_THRE)==0); SEND_BUF1 = (u8) ch;
}
我们可以将这个esp_recv_buff发送至串口一打印出来,判断数据有没有存入。
void USART3_IRQHandler(void)
{ if(USART3_SR&UART_LSR_RDR) { if(Usart_ISR.U3RXOperation != NULL) Usart_ISR.U3RXOperation(RECV_BUF3); } HAL_UART_IRQHandler(&huart3);这里在主函数要添加一个中断函数,可以判断是否接收中。
void ESP_RecvProcess(void)
{ USART1_Send_Poll(esp_recv_buff,esp_recv_len);ProcessRx(esp_recv_buff,esp_recv_len);ESP_RecvBuff_Clear();HAL_Delay(1000);}int main(void)
{HAL_Init();SystemClock_Config();SysTick_Init(systick_isr);USART1_Init(115200,NULL,NULL);HI600_Init(); while(1){ ESP_RecvProcess();}
}
我们在主函数中初始化串口1和3,在循坏里面打印数据和解析数据。
注意在接收函数中,还有添加ESP_RecvBuff_Clear()函数和一个延时函数,帮助我们按时清空ESP_RecvBuff里面的数据,以防数组溢出。
当我们能正常打印串口3发送至串口1的数据时,我们就可以开始数据解析了
如图:
2.2数据解析
因为我想要读取的NMEA协议是RMC,首先我们查看RMC的输出数据格式
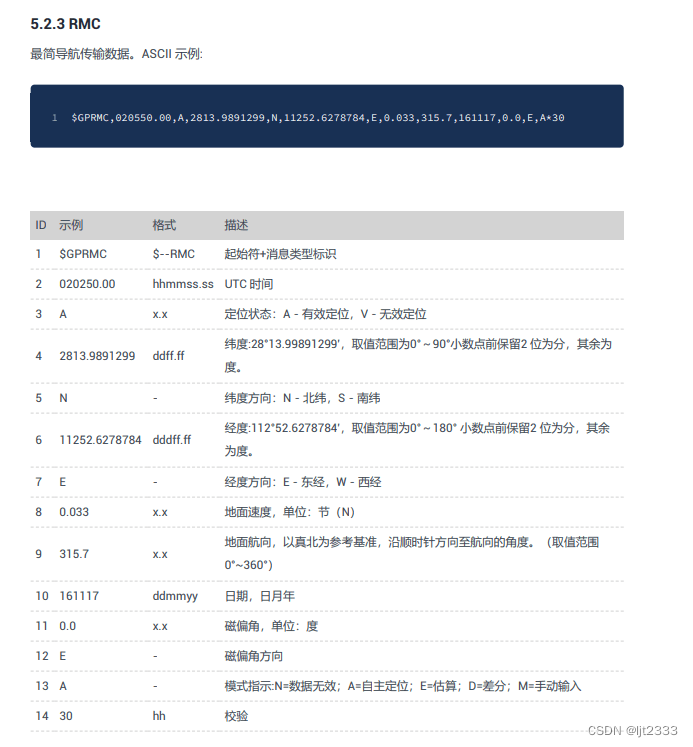
可见报头的开始是$GPRMC
//数据每一位的字符#define BEGIN1 '$'#define BEGIN2 'G'#define BEGIN3 'N'#define BEGIN4 'R'#define BEGIN5 'M'#define BEGIN6 'C'uint8_t receivedbyte, rx_sum, command;uint8_t rx_data[100];uint16_t rx_dategram_len;while (size){switch (rx_datagram_state){case IDLE:{ int i=1;//printf("%s",buff);token=strchr((char*)buff,B);*buff=*token;while(i){receivedbyte = *buff;if (BEGIN1 == receivedbyte){// printf("HEADER1:%c\r\n", *buff);rx_sum = 0;rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER1;buff++;i=0;}else{buff++;}}break;}case SEEN_HEADER1: {receivedbyte = *buff;if (BEGIN2 == receivedbyte){// printf("HEADER2:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER2;buff++;}break;}case SEEN_HEADER2: { int i=1;while(i) {receivedbyte = *buff;if (BEGIN3 == receivedbyte){// printf("HEADER3:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER3;buff++;i=0;}else{buff++;}}break;}case SEEN_HEADER3: //{ int i=1;while(i) {receivedbyte = *buff;if (BEGIN4 == receivedbyte){// printf("HEADER4:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER4;buff++;i=0;}else{buff++;}}break;}case SEEN_HEADER4: //{ int i=1;while(i) {receivedbyte = *buff;if (BEGIN5 == receivedbyte){// printf("HEADER5:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER5;buff++;i=0;}else{buff++;}}break;}case SEEN_HEADER5: //{int i=1; while(i) {receivedbyte = *buff;if (BEGIN6 == receivedbyte){// printf("HEADER6:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER6;buff++;i=0;}else{buff++;}}break;}case SEEN_HEADER6: //{receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER7:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER7;buff++;}break;}后面便是我们的第一个数据UTC时间,这里注意UTC时间不是北京时间!!!(多谢超核公司的熙熙提醒,因为我当时还在群里问了)

case SEEN_HEADER7: {uint8_t TIME[11];for(int i=0;i<=10;i++){TIME[i]=*buff++;}UTC.Hour[0]=TIME[0];UTC.Hour[1]=TIME[1];UTC.Minute[0]=TIME[2];UTC.Minute[1]=TIME[3];UTC.Sconds[0]=TIME[4];UTC.Sconds[1]=TIME[5];UTC.mSconds[0]=TIME[7];UTC.mSconds[1]=TIME[8];UTC.mSconds[2]=TIME[9];printf("UTC时间为:%c%c:%c%c:%c%c\r\n",UTC.Hour[0],UTC.Hour[1],UTC.Minute[0],UTC.Minute[1],UTC.Sconds[0],UTC.Sconds[1]);//printf("TIME=%s",TIME); rx_datagram_state = SEEN_HEADER8;// buff++;break;}OS:如果有想要北京时间的读者,可以自己查询UTC时间转换北京时间的算法,这里就不另外介绍了。
case SEEN_HEADER8: //读A{receivedbyte = *buff;if (BEGIN9 == receivedbyte){// printf("HEADER8:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER9;buff++;}break;}这里是RMC最重要的一个地位,毕竟这里是判断是有效定位还是无效定位的地方,如果是A就代表有效定位,如果是V就代表无效定位。
case SEEN_HEADER9: {receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER9:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER10;buff++;}break;}这个是一个读逗号的判断,如果不想判断,可以在读A的代码中,在break的前面加上buff++,这样可以不用读逗号,但我为了准确性,还是判断了每一位逗号。
case SEEN_HEADER10: {uint8_t TIME[12];for(int i=0;i<=11;i++){TIME[i]=*buff++;}lat.Hour[0]=TIME[0];lat.Hour[1]=TIME[1];lat.divide[0]=TIME[2];lat.divide[1]=TIME[3];lat.mSconds[0]=TIME[5];lat.mSconds[1]=TIME[6];lat.mSconds[2]=TIME[7];lat.mSconds[3]=TIME[8];lat.mSconds[4]=TIME[9];lat.mSconds[5]=TIME[10];lat.mSconds[6]=TIME[11];printf("纬度: %c%c¡ã%c%c.%c%c%c%c%c%c%c\r\n",TIME[0],TIME[1],TIME[2],TIME[3],TIME[5],TIME[6],TIME[7],TIME[8],TIME[9],TIME[10],TIME[11]);rx_datagram_state = SEEN_HEADER11;// buff++;break;}case SEEN_HEADER11: //{receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER9:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER12;buff++;}break;}case SEEN_HEADER12: {receivedbyte = *buff;if (BEGIN3 == receivedbyte){// printf("HEADER10:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER13;buff++;}// buff++;break;}
// case SEEN_HEADER13: {receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER11:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER14;buff++;}break;}case SEEN_HEADER14: {uint8_t TIME[13];for(int i=0;i<=12;i++){TIME[i]=*buff++;}lon.Hour[0]=TIME[0];lon.Hour[1]=TIME[1];lon.Hour[2]=TIME[2];lon.divide[0]=TIME[3];lon.divide[1]=TIME[4];lon.mSconds[0]=TIME[6];lon.mSconds[1]=TIME[7];lon.mSconds[2]=TIME[8];lon.mSconds[3]=TIME[9];lon.mSconds[4]=TIME[10];lon.mSconds[5]=TIME[11];lon.mSconds[6]=TIME[12];printf("经度: %c%c%c¡ã%c%c.%c%c%c%c%c%c%c\r\n",TIME[0],TIME[1],TIME[2],TIME[3],TIME[4],TIME[6],TIME[7],TIME[8],TIME[9],TIME[10],TIME[11],TIME[12]);rx_datagram_state = SEEN_HEADER15;// buff++;break;}case SEEN_HEADER15: {receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER9:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER16;buff++;}break;}case SEEN_HEADER16: {receivedbyte = *buff;if (BEGIN11 == receivedbyte){printf("东航:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER17;buff++;}break;}case SEEN_HEADER17: {receivedbyte = *buff;if (BEGIN7 == receivedbyte){// printf("HEADER11:%c\r\n", *buff);rx_sum += receivedbyte;rx_datagram_state = SEEN_HEADER18;buff++;}break;}
// case SEEN_HEADER18: {uint8_t TIME[5];for(int i=0;i<=4;i++){TIME[i]=*buff++;}GS.Hour[0]=TIME[0]; GS.mSconds[0]=TIME[2];GS.mSconds[1]=TIME[3];// GS.mSconds[2]=TIME[4];printf("地面速度%c.%c%c\r\n",TIME[0],TIME[2],TIME[3]);rx_datagram_state = SEEN_HEADER19;break;}case SEEN_HEADER19: {uint8_t TIME[6];for(int i=0;i<=5;i++){TIME[i]=*buff++;}GH.Hour[0]=TIME[0]; GH.Hour[1]=TIME[1]; //GH.Hour[2]=TIME[2]; GS.mSconds[0]=TIME[3];GS.mSconds[1]=TIME[4];printf("地面航向%c%c.%c%c\r\n",TIME[0],TIME[1],TIME[3],TIME[4]);rx_datagram_state = SEEN_HEADER20;break;}后面的数据也是同理可得,不过得细心判断,不然就会出错
case SEEN_HEADER20: {uint8_t TIME[6];for(int i=0;i<=5;i++){TIME[i]=*buff++;}date.YEAR[0]=TIME[0]; date.YEAR[1]=TIME[1]; date.Mon[0]=TIME[2]; date.Mon[1]=TIME[3];date.DAY[0]=TIME[4];date.DAY[1]=TIME[5];printf("日期:%c%c.%c%c.%c%c\r\n",TIME[4],TIME[5],TIME[2],TIME[3],TIME[0],TIME[1]);rx_datagram_state = SEEN_HEADER21;break;}case SEEN_HEADER21: {command = *buff; rx_sum += command;rx_datagram_state = SEEN_COMMAND;printf("data over!");//printf("SEEN_COMMAND:%x\r\n", command);buff++;}break;这个地方日期要注意,因为它是反着来的,例如今天是070823,第一次正着读还以为是信息问题,经官方工作人员熙熙的提醒后,明白了这个数据是23年08月07日。后面的数据暂时不需要我就停止了解析。
最后结果:
总结:
1.串口3发送至串口1时要多调试,不然很有可能读取的时候,打开串口啥也没有。
2.解析的过程中要有耐心,注意buff的顺序,不然很有可能读错位或者数据不显示。
3.后续可以把UTC时间转换成北京时间,添加算法函数即可。
4.只解析了一个RMC的信息,可以多写一些解析函数,将GGA,GSV也解析出来。
这篇关于关于利用超核HI600D获取UTC时间,经纬度,东经,地面速度,地面航向,日期。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




