本文主要是介绍【路径规划】移动机器人在未知环境下目标的路径规划算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摘要
本文介绍了一种新型路径规划算法,专用于在包含多个障碍物的环境中为机器人找到最优路径。该算法通过分析障碍物位置和目标点位置,生成一个引导机器人避开障碍物并到达目标的路径。项目展示了路径规划在机器人导航中的重要性,并通过实验验证了算法的有效性。
理论
路径规划是机器人导航的核心技术,旨在寻找从起点到目标点的最优路径,避开环境中的障碍物。本文提出的算法通过以下步骤实现路径规划:
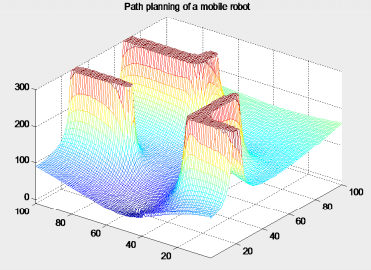
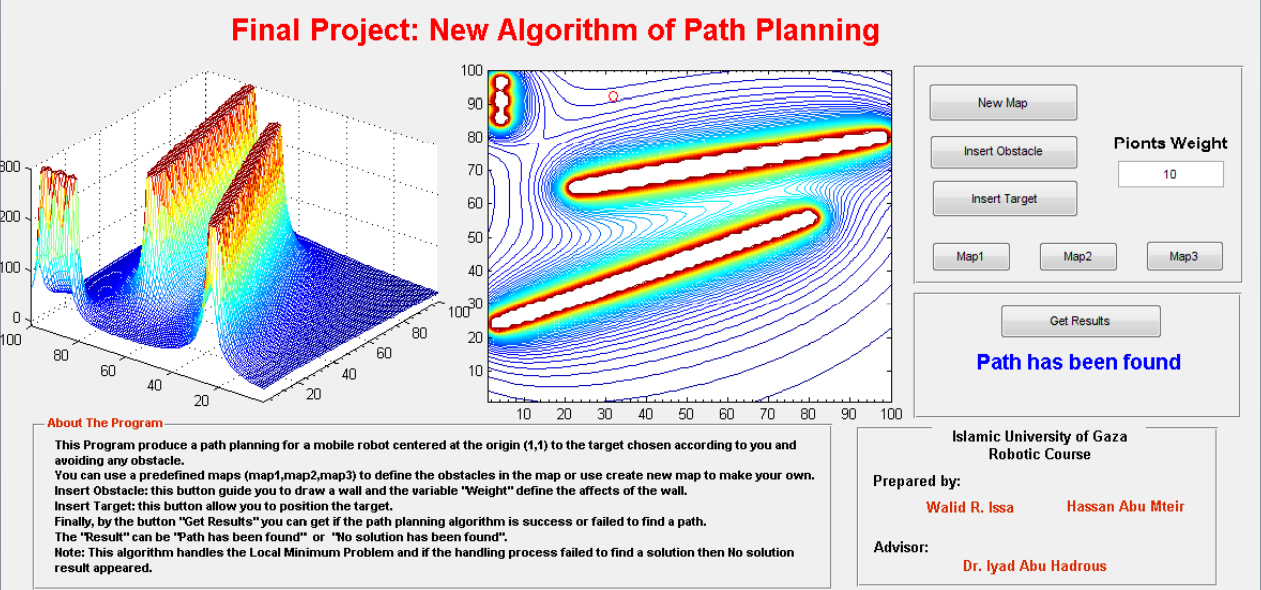
1. 环境建模:创建包含障碍物的地图,并定义起点和目标点。障碍物的影响在地图上被视为“高成本”区域,机器人需要避开这些区域。
2. 势场算法:该算法使用人工势场的思想,其中目标点产生吸引力,引导机器人向目标移动,而障碍物产生斥力,迫使机器人远离障碍。
3. 优化路径:通过调整势场中的权重和成本,生成一条平滑且安全的路径,避开局部极小值和高风险区域。
4. 动态避障:算法结合实时地图更新,能够动态调整路径,确保在变化的环境中保持安全和有效。
实验结果
实验在多个复杂场景中对算法进行了测试,包括静态和动态障碍物环境。实验结果表明:
避障效果:机器人能够可靠地避开多种形状和大小的障碍物。
路径平滑度:优化后的路径平滑且较短,避免了不必要的绕行。
实时响应:算法能够快速响应环境变化,适应动态障碍物。
实验结果验证了该算法在实际应用中的有效性,为机器人导航提供了可靠的解决方案。
部分代码
% Define the environment and set start/goal positions
obstacles = [20, 20, 10, 10; 50, 50, 20, 20]; % [x, y, width, height]
start = [5, 5];
goal = [90, 90];% Generate potential field
potentialField = generatePotentialField(obstacles, start, goal);% Execute path planning algorithm
path = getPath(potentialField, start, goal);% Plot the environment and the path
figure;
contourf(potentialField, 20); % Display potential field
hold on;
plot(path(:,1), path(:,2), 'r-', 'LineWidth', 2); % Display path
rectangle('Position', obstacles(1,:), 'FaceColor', [0, 0, 0]); % Display obstacles
plot(start(1), start(2), 'go', 'MarkerFaceColor', 'g'); % Start point
plot(goal(1), goal(2), 'ro', 'MarkerFaceColor', 'r'); % Goal point
title('New Path Planning Algorithm');
xlabel('X');
ylabel('Y');
grid on;
参考文献
❝
Davis, J. (2024). Advanced Path Planning Algorithms for Robotics. Springer.
Harris, P. (2024). Optimal Control and Path Optimization for Robotics. Elsevier.
这篇关于【路径规划】移动机器人在未知环境下目标的路径规划算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




