本文主要是介绍莫凡Pytorch学习笔记(六),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Pytorch中的mini-batch和优化器
本篇笔记主要对应于莫凡Pytorch中的3.5和3.6节。主要讲了如何使用Pytorch中的mini-batch和优化器。
Pytorch中的mini-batch
在笔记二、三中搭建的网络中,我们是一次性直接将整个训练集送进网络,这种方式称为Full Batch Learning。但是当数据量很大时,首先一次性加载这么多数据收到了内存的限制,同时由于要计算每个样例的梯度,计算速度也会下降。
那么我们是否可以每次只用一条样例数据进行训练呢。答案是可以的,但是这样每次的随机性太大,这种方法称为随机梯度下降法。这种方法永远不会收敛,而是会一直在最小值附近波动。
所以,取一个折中的做法是选取一个合理的batch_size大小进行训练,每次从整个训练集中拿出一部分来训练。
这里我们简单展示Pytorch中的mini-batch操作如何进行。首先我们需要导入Data模块
import torch
import torch.utils.data as Data
设置超参数BATCH_SIZE
BATCH_SIZE = 8
生成训练数据,这里直接生成了10个整数作为训练数据。
x = torch.linspace(1, 10, 10)
y = torch.linspace(10, 1, 10)
接下来,我们进行batch的一些设置
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(dataset = torch_dataset, # 要划分的数据集batch_size = BATCH_SIZE, # 所设置的batch大小,一般2的次方倍会有助于快速计算shuffle = True, # 是否打乱,打乱更有助于训练num_workers = 2, # 所使用的线程数目
)
使用mini-batch的展示,这里当最后一个分组不够时,会只用剩下的那些
Epoch: 0 | Step: 0 | batch x: [ 9. 10. 8. 3. 5. 6. 1. 4.] | batch y: [ 2. 1. 3. 8. 6. 5. 10. 7.]
Epoch: 0 | Step: 1 | batch x: [7. 2.] | batch y: [4. 9.]
Epoch: 1 | Step: 0 | batch x: [3. 7. 2. 8. 4. 1. 6. 5.] | batch y: [ 8. 4. 9. 3. 7. 10. 5. 6.]
Epoch: 1 | Step: 1 | batch x: [ 9. 10.] | batch y: [2. 1.]
Epoch: 2 | Step: 0 | batch x: [4. 5. 8. 7. 2. 1. 3. 6.] | batch y: [ 7. 6. 3. 4. 9. 10. 8. 5.]
Epoch: 2 | Step: 1 | batch x: [ 9. 10.] | batch y: [2. 1.]
不同优化器的对比
我们对比几种不同的优化器性能。这里主要对比四种不同的优化器:
- SGD(随机梯度下降)
- Momentum(动量梯度下降)
- RMSprop(root mean square)
- Adam(Adaptive Moment Estimation)
首先,我们导入相关的库和设置超参数
import torch
import torch.utils.data as Data
import torch.nn.functional as F
import matplotlib.pyplot as plt
这里学习率设置为0.01,Batch_size设置为32,设置12个Epoch。
LR = 0.01
BATCH_SIZE = 32
EPOCH = 12
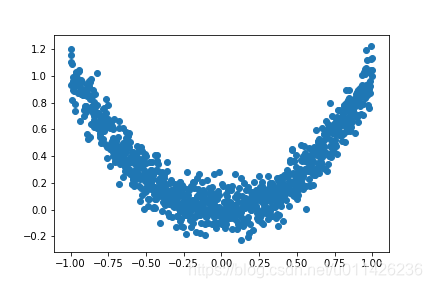
接着我们生成和展示训练数据
x = torch.unsqueeze(torch.linspace(-1, 1, 1000), dim=1)
y = x.pow(2) + 0.1 * torch.normal(torch.zeros(*x.size()))# plot dataset
plt.scatter(x.numpy(), y.numpy())
plt.show()
效果如下:
然后,我们使用mini-batch进行数据集划分
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(dataset=torch_dataset,batch_size=BATCH_SIZE,shuffle=True,num_workers=2
)
并搭建网络
# default network
class Net(torch.nn.Module):def __init__(self, n_feature, n_hidden, n_prediction):super(Net, self).__init__()self.hidden = torch.nn.Linear(n_feature, n_hidden)self.prediction = torch.nn.Linear(n_hidden, n_prediction)def forward(self, x):x = F.relu(self.hidden(x))y = self.prediction(x)return y
接着,我们生成使用不同优化器的网络
# different nets
net_SGD = Net(1, 20, 1)
net_Momentum = Net(1, 20, 1)
net_RMSprop = Net(1, 20, 1)
net_Adam = Net(1, 20, 1)nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam]
opt_SGD = torch.optim.SGD(net_SGD.parameters(), lr=LR)
opt_Momentum = torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8)
opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9)
opt_Adam = torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9, 0.99))optimizers = [opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam]
loss_func = torch.nn.MSELoss()
losses_his = [[], [], [], []] # record loss
最后,进行训练输出中间结果
for epoch in range(EPOCH):print("epoch: ", epoch)for step, (batch_x, batch_y) in enumerate(loader):b_x = Variable(batch_x)b_y = Variable(batch_y)for net, opt, l_his in zip(nets, optimizers, losses_his):output = net(b_x) # get output for every netloss = loss_func(output, b_y) # compute loss for every netopt.zero_grad() # clear gradients for next trainloss.backward() # backpropagation, compute gradientsopt.step() # apply gradientsl_his.append(loss.data) # loss recorderlabels = ['SGD', 'Momentum', 'RMSprop', 'Adam']
for i, l_his in enumerate(losses_his):plt.plot(l_his, label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0, 0.2))
plt.show()
最后,得到的展示输出如下:

可以看到,Adam和RMSprop效果相仿,最好。SGD效果最差,加入动量后其效果有所改善。
参考
- 莫凡Python:Pytorch动态神经网络,https://mofanpy.com/tutorials/machine-learning/torch/
这篇关于莫凡Pytorch学习笔记(六)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






