本文主要是介绍恒压频比开环控制系统Matlab/Simulink仿真分析(SPWM控制方式),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
介绍恒压频比的开环控制方法驱动永磁同步电机的转动,首先分析恒压频比的控制原理,然后在Matlab/Simulink中进行永磁同步电机恒压频比开环控制系统的仿真分析,最后将Simulink中的恒压频比控制算法生成代码加载到实际工程中进行工程实现。
一、 恒压频比(V/F)控制原理
变频调速系统一般要求在变频时保持电机气隙磁通为最大值免不变,这样可以在允许的电流下获得最大转矩,使电机具有良好的调速性能,交流电机每相定子感应电动势为:
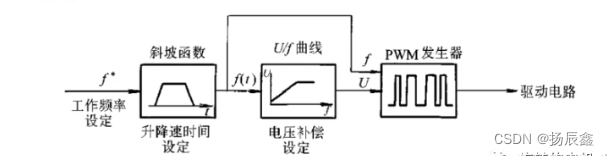
式中4.44Nk是由电动机结构决定的常数。从上式可以看出,在改变频率时要保持气息磁通。不变,就需要同时改变E,使E,随变化并保持E。1为固定的常数C。因为E,不能直接检测和控制,在忽略定子绕组电阻时E,近似等于电动机端电压U,,而U,和,都可方便地通过变频器控制,因此变频调速系统保持U./,为常数的控制就称为恒压频比控制(VF)。恒压频比开环控制框图如下所示:
永磁同步电机恒压频比控制方法与异步电机恒压频比控制方法相似,也是控制电机输入电压与频率同时变化,从而使气隙磁通保持恒定。该控制方法没有电机电流、电压、位置等物理量的反馈,动态性能较差,在给定目标转速发生变化或者负载突变的情况下容易产生失步和震荡的问题,但该控制方法胜在简单,多适用于对转速精度要求不高的场合。
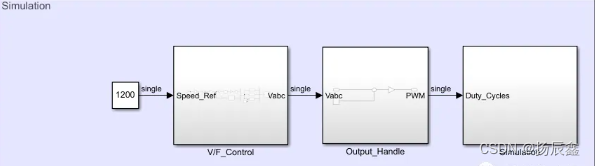
永磁同步电机恒压频比开环控制系统Matlab/Simulink仿真框图如下:
二、仿真电路分析
2.1.1.恒压频比控制算法

恒压频比控制算法:永磁同步电机转速与频率的换算关系如下所示:
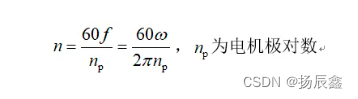
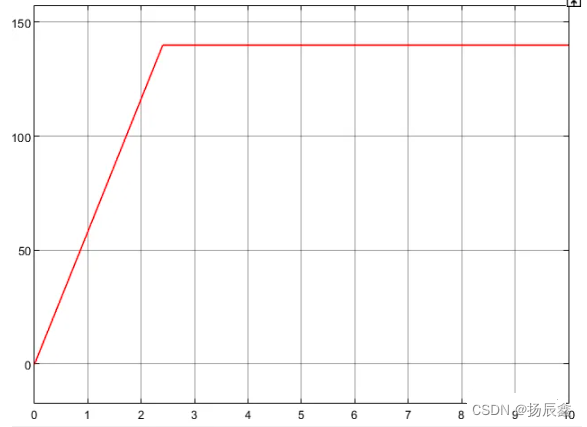
首先,将设定的电机目标转速通过上式换算为频率,由于该开环控制系统没有自动限制启动电流的作用,因此加入了一个斜坡函数使频率有一个平缓的变化过程。例如仿真中设定的目标转速为1200r/min,换算为频率的过程如下图所示:
然后,由恒压频比V/F控制算法特性(下图所示),使输入电压与频率同步变化,从而保持气隙磁通恒定。低频时Us和Eg都较小,定子电阻和漏感压降所占分量比较显著,不能再忽略,此时人为的把定子电压抬高一些,近似的补偿定子阻抗压降,如下图b线所示:
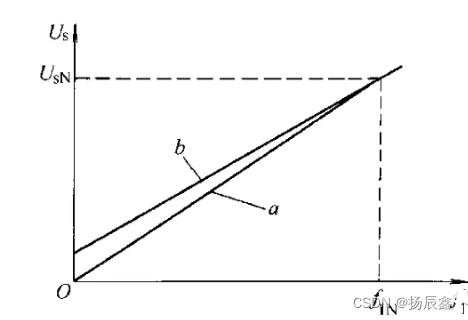
由上图可知输入电压与频率的关系为(带低频补偿的b线,已知(0,U0)(f1N,UsN)):
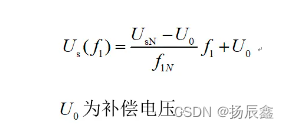
将频率通过上式换算为电压,由电机的额定转速计算出额定频率f1N(永磁同步电机转速与频率的关系)。永磁同步电机的恒压频比控制为基频以下调速,系统最高频率不能超过额定频率f1N,例如仿真中所选永磁同步电机的额定转速为12540r/min,计算出额定频率f1N为1463Hz,为系统最高设定频率。
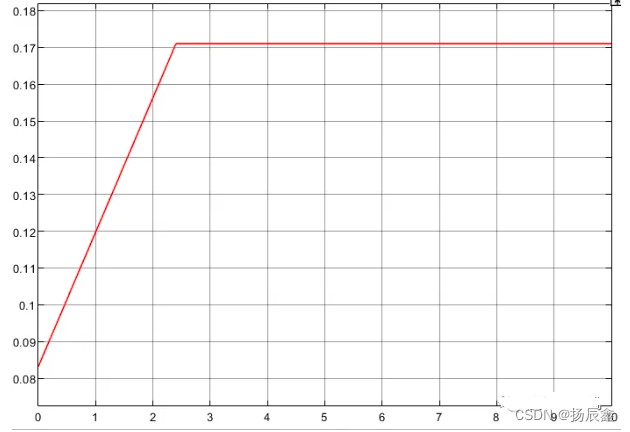
目标转速设置为1200r/min,将转速换算为频率,再由频率的变化得到输入电压的变化,如下图所示:
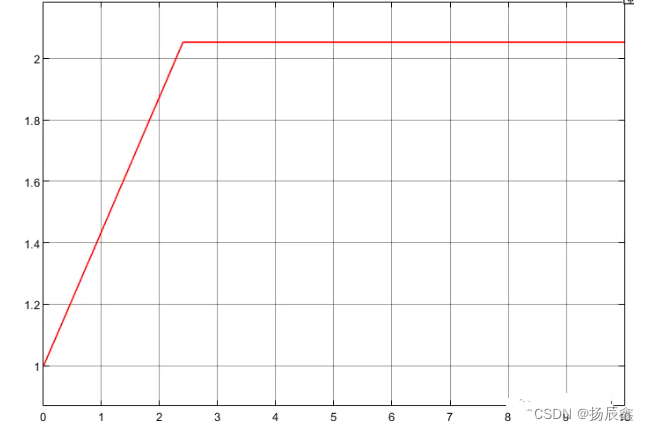
此处作了一个归一化处理,将电压的变化除以电机额定电压,使输出电压的范围落在[0,1]区间内。
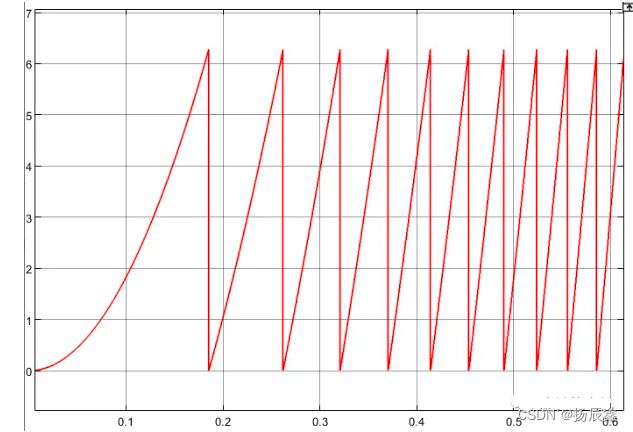
将频率转换为角速度,再对角速度求积分获得当前的角度,如下图所示:
此时已获得输入电压的幅值Um与相角wt,再通过下式将幅值与相角的电压表示转化为两相αβ坐标系下的电压表示:
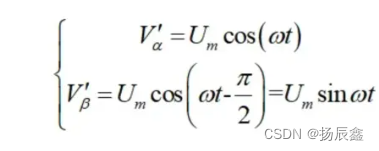
αβ坐标系下的电压表示为:
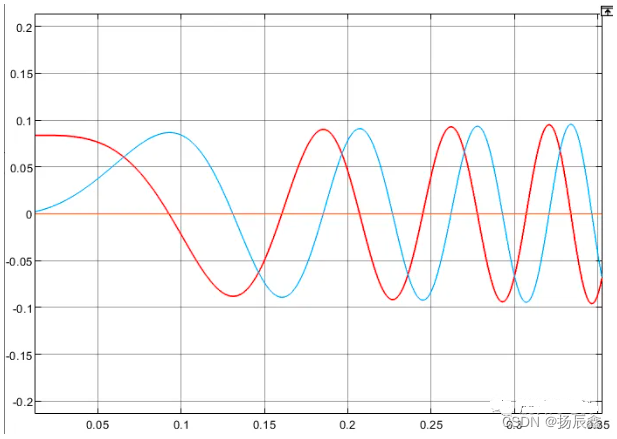
接着采用反Clark变换,得到最终输入到电机的三相电压:
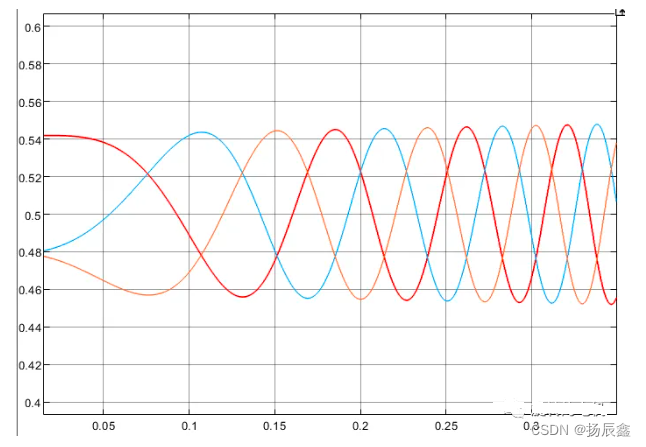
2.1.2.输出处理
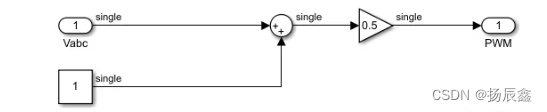
对恒压频比控制算法的输出电压做处理,使其落在[0,1]的范围内:
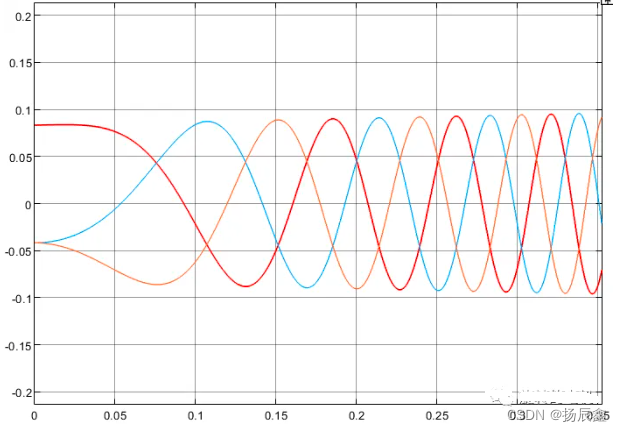
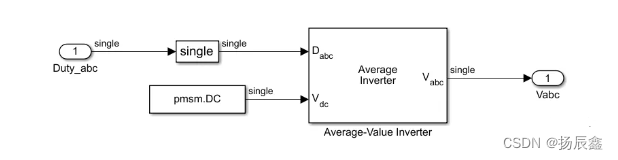
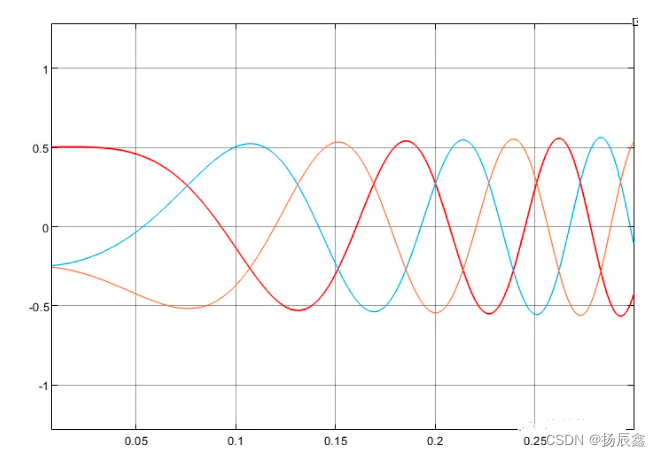
2.1.3.主电路
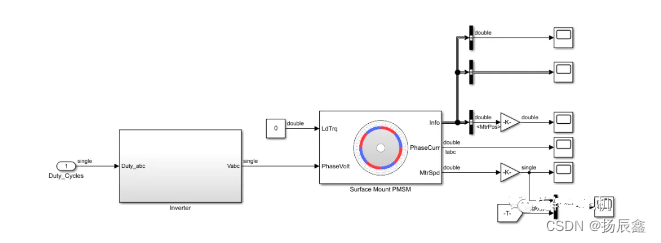
主电路包括逆变电路与永磁同步电机,逆变电路如下图所示,采用Average-Value Inverter模块直接生成三相正弦电压,下图为目标转速1200r/min下输入到电机的电压波形。
2.2.仿真结果分析
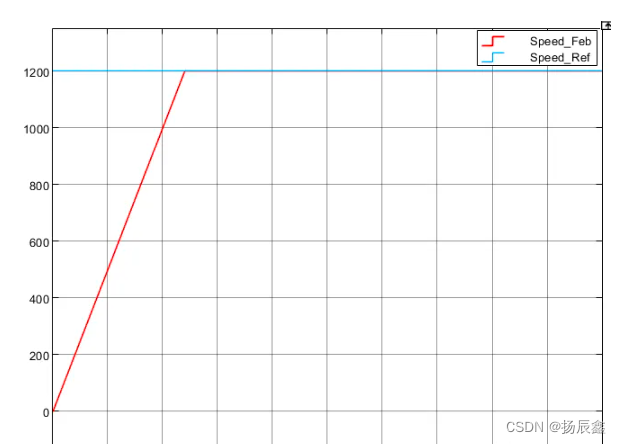
2.2.1.设定目标转速为1200r/min
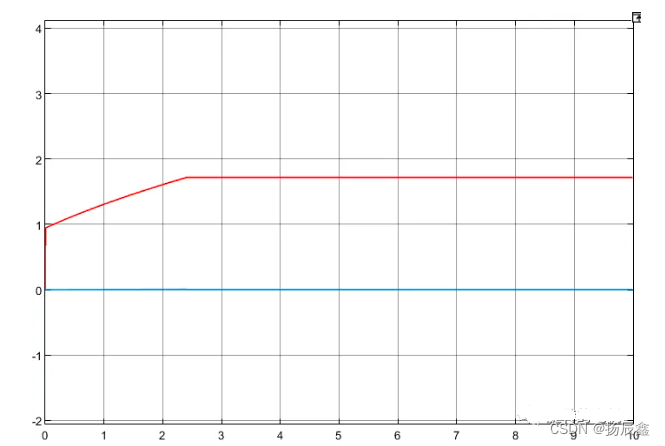
目标转速与实际转速的波形曲线:
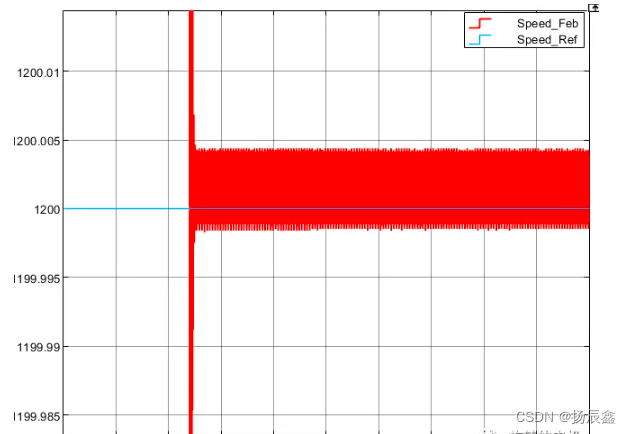
稳态时,目标转速与实际转速的误差:
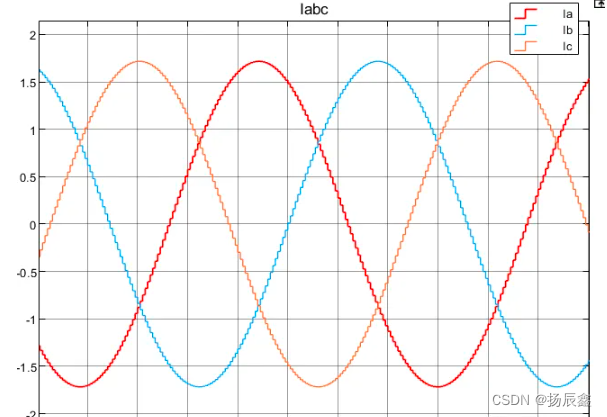
稳态时,电机定子电流:
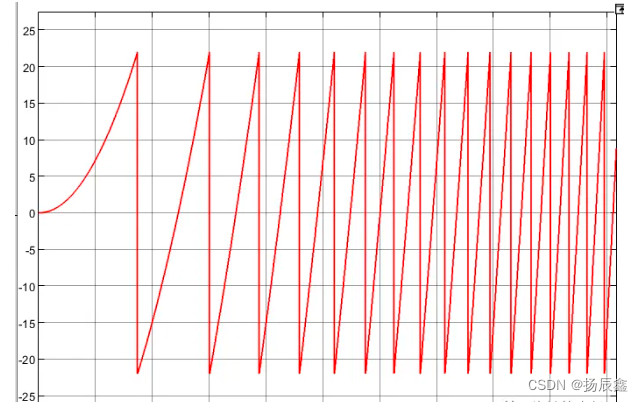
电机转子位置:
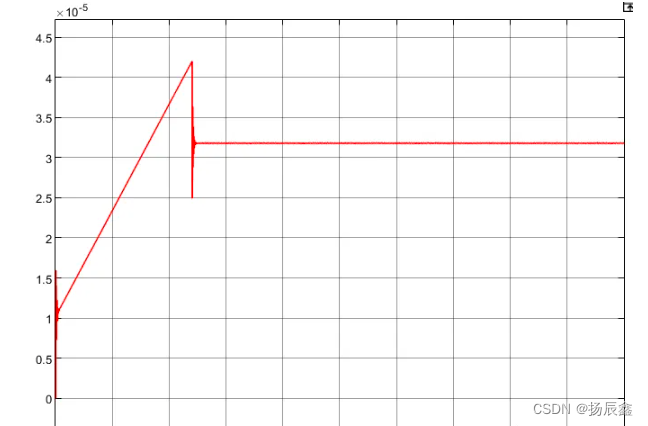
dq坐标系下的定子电流值:
电磁转矩:
2.2.1.设定目标转速为变化值
目标转速:
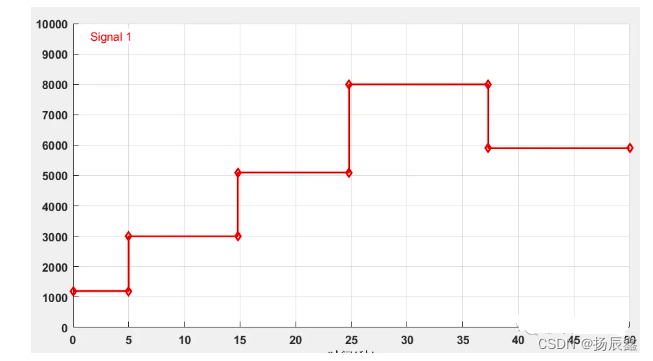
目标转速与实际转速:

从图中可以看出电机加减速有一段斜坡时间,电机加减速的快慢由恒压频比控制算法中由转速换算为频率时所设置的斜坡函数斜率有关。
总结
本章节采用恒压频比的开环控制方法驱动永磁同步电机的转动,分析了恒压频比的控制原理,然后在Matlab/Simulink中进行了永磁同步电机恒压频比开环控制系统的仿真分析,最后将Simulink中的恒压频比控制算法生成代码加载到实际工程中进行了工程实现,为后续章节的分析奠定基础。
这篇关于恒压频比开环控制系统Matlab/Simulink仿真分析(SPWM控制方式)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






