本文主要是介绍基于模糊PID控制器的汽车电磁悬架控制系统simulink建模与仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
5.完整工程文件
1.课题概述
基于模糊PID控制器的汽车电磁悬架控制系统simulink建模与仿真。
2.系统仿真结果
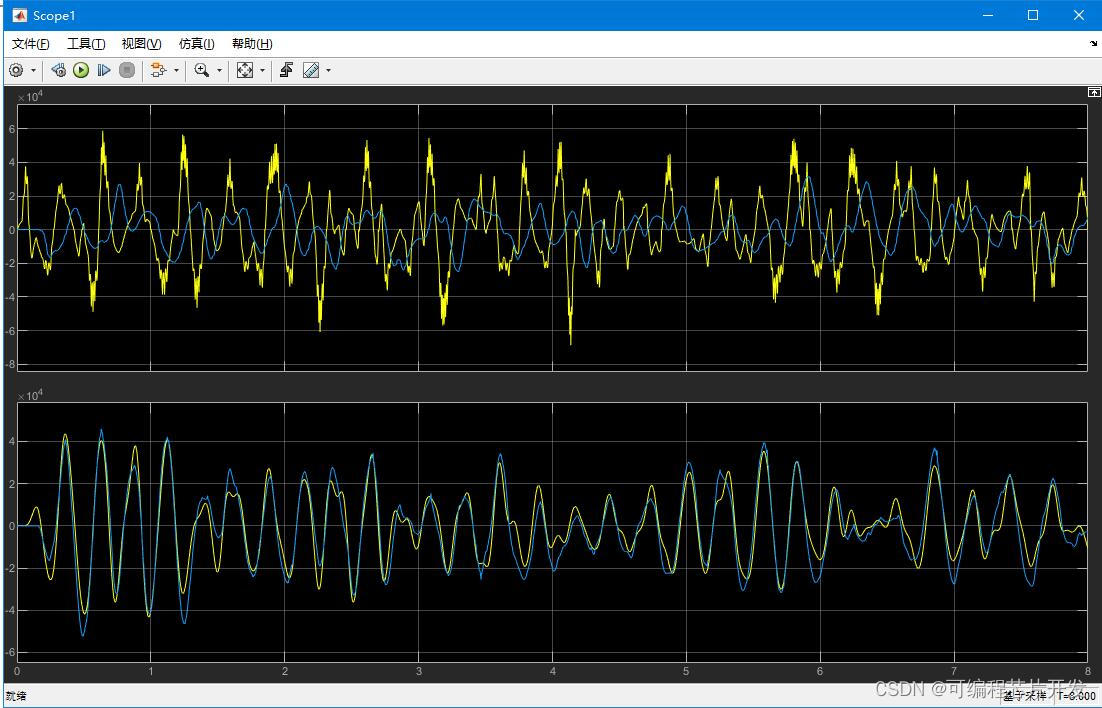
上面的仿真结果是无控制器和LQG的对比,以及有控制器和LQG的对比仿真。
3.核心程序与模型
版本:MATLAB2022a


08_015m
4.系统原理简介
汽车电磁悬架控制系统采用模糊PID控制器融合了模糊逻辑的非线性处理能力和PID控制器的经典稳定性与快速响应特性,以提高车辆行驶的舒适性和操控性能。这种控制策略特别适用于半主动或主动悬架系统,能够动态调整悬架刚度和阻尼系数,以适应不同的路面条件和驾驶需求。
模糊控制器的核心是模糊规则库,它根据误差和误差变化率的模糊化结果,动态调整PID参数。例如,一个简单的规则可能是:
- 如果误差是“大”且误差变化率是“正”,则增大Kp以快速减小误差;
- 如果误差是“小”且误差变化率是“负”,则减少Ki以避免超调。
这些规则通过一系列IF-THEN语句形式化,并且可以有许多这样的规则以覆盖所有可能的输入情况。

基于模糊PID控制器的汽车电磁悬架控制系统,通过模糊逻辑动态调整PID控制器参数,实现了对复杂路况的自适应控制。该系统不仅提高了车辆行驶的平稳性,而且增强了对紧急避障、高速行驶等特殊工况的应对能力。
5.完整工程文件
v
这篇关于基于模糊PID控制器的汽车电磁悬架控制系统simulink建模与仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





