openspace专题
自动驾驶---OpenSpace之Hybrid A*规划算法
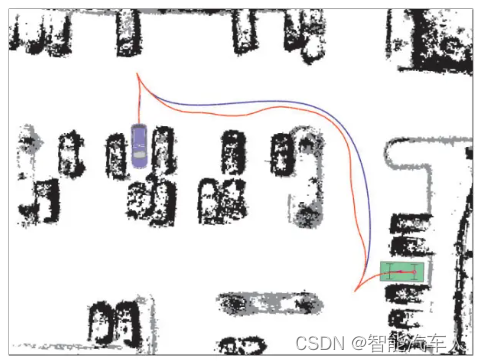
1 背景 笔者在上周发布的博客《自动驾驶---低速场景之记忆泊车》中,大体介绍了记忆泊车中的整体方案,其中详细阐述了planning模块的内容,全局规划及局部规划(会车)等内容,包括使用的算法,但是没有深入详细地展开讲述OpenSpace规划算法,因此在本篇博客中,详细讲解该部分内容。 OpenSpace规划主要涉及到自动驾驶车辆在开放、非结构化环境中的路径规划