本文主要是介绍使用模拟SPI接口驱动串行接口的LCD( STM32F4),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
概述
1. 硬件介绍
1.1 ST7796-LCD
1.2 MCU IO与LCD PIN对应关系
2 代码实现
2.1 STM32CubeMX 6.11生成工程
2.2 IO模拟SPI接口
2.3 实现LCD的驱动
3 测试
测试代码下载地址:
stm32-f407-lcd-ft6336-proj资源-CSDN文库
gitee下载地址:
https://gitee.com/mftang/stm32_open_test_proj/tree/master/stm32_f407_lcd_proj概述
本文主要讲述使用模拟SPI接口驱动ST7796-LCD,主控MCU为STM32F407芯片。笔者详细介绍整个驱动的实现过程,并使用STM32Cube生成一个工程,测试驱动程序的功能。
1. 硬件介绍
1.1 ST7796-LCD
LCD的PIN引脚功能介绍
| 序号 | 模块引脚 | 引脚说明 |
| 1 | VCC | 屏电源正 |
| 2 | GND | 屏电源地 |
| 3 | LCD_CS | 液晶屏片选控制信号,低电平有效 |
| 4 | LCD_RST | 液晶屏复位控制信号,低电平复位 |
| 5 | LCD_RS | 液晶屏命令/数据选择控制信号 高电平:数据,低电平:命令 |
| 6 | SDI(MOSI) | SPI总线写数据信号(SD卡和液晶屏共用) |
| 7 | SCK | SPI总线时钟信号(SD卡和液晶屏共用) |
| 8 | LED | 液晶屏背光控制信号(如需要控制,请接引脚,如不需要控制,可以不接) |
| 9 | SDO(MISO) | SPI总线读数据信号(SD卡和液晶屏共用) |
| 10 | CTP_SCL | 电容触摸屏IIC总线时钟信号(无触摸屏的模块不需连接) |
| 11 | CTP_RST | 电容触摸屏复位控制信号,低电平复位(无触摸屏的模块不需连接) |
| 12 | CTP_SDA | 电容触摸屏IIC总线数据信号(无触摸屏的模块不需连接) |
| 13 | CTP_INT | 电容触摸屏IIC总线触摸中断信号,产生触摸时,输入低电平到主控(无触摸屏的模块不需连接) |
| 14 | SD_CS | SD卡片选控制信号,低电平有效(不使用SD卡功能,可不接) |
实体LCD Port对应关系如下图所示

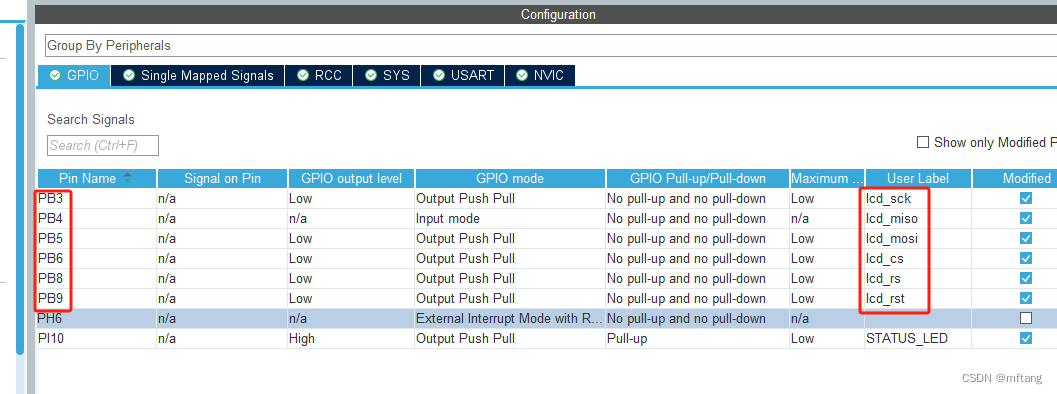
1.2 MCU IO与LCD PIN对应关系
| STM32 PIN引脚 | LCD PIN引脚 |
|---|---|
| PB5-MOSI | MOSI |
| PB4-MISO | MISO |
| PB3-SCK | SCK |
| PB6 | CS |
| PB9 | RST |
| PB8 | RS |
2 代码实现
2.1 STM32CubeMX 6.11生成工程
笔者尝试使用IO模拟SPI接口,以实现读写数据功能,其配置接口信息如下:
step-1: 配LCD对应的IO
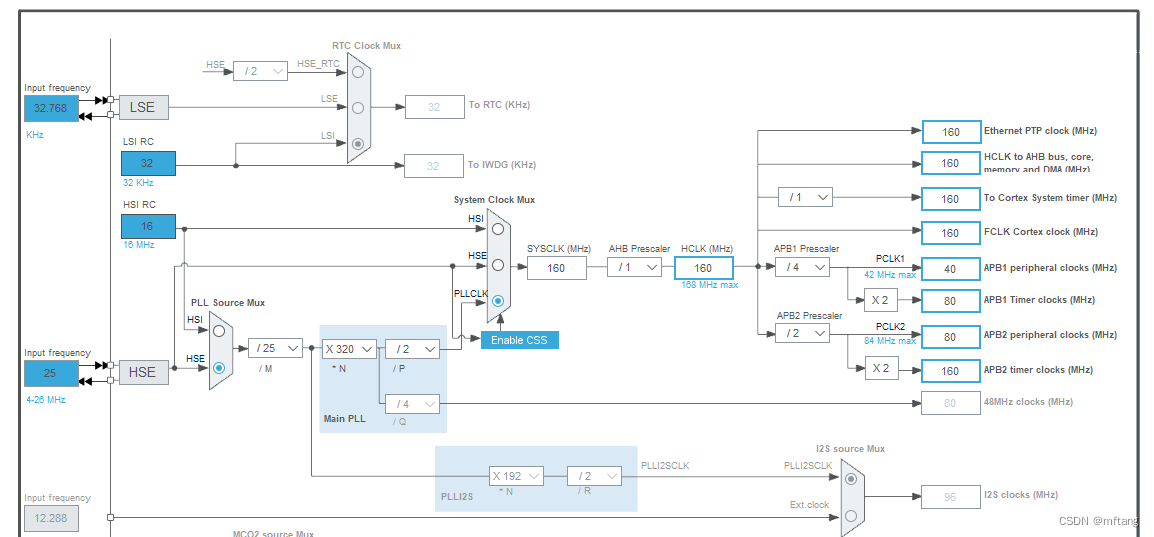
step-2: 使能外部时钟

配置完成后,系统时钟关系如下:
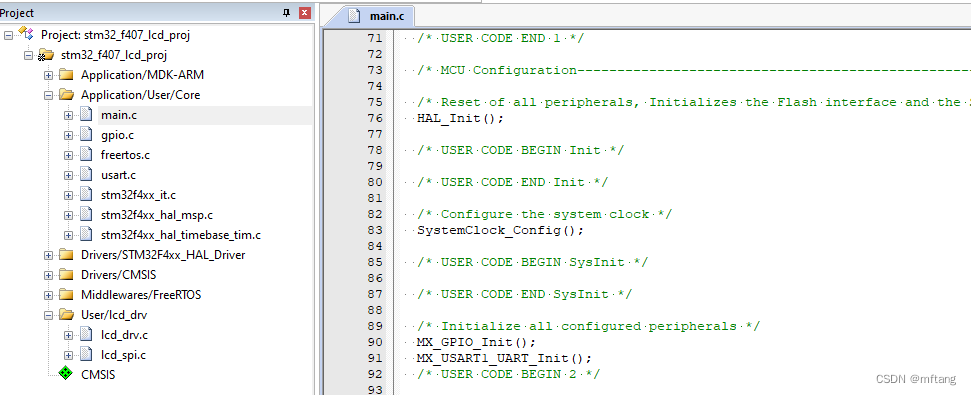
step-3: 生成工程
2.2 IO模拟SPI接口
1)头文件里定义MOSI,SCK和MISO的电平状态
#ifndef __LCD_SPI_H
#define __LCD_SPI_H#include <stdlib.h>
#include <stdio.h>
#include "main.h"// spi port io
// set IO to high
#define SPI_SCLK_SET HAL_GPIO_WritePin(lcd_sck_GPIO_Port,lcd_sck_Pin, GPIO_PIN_SET )
#define SPI_MOSI_SET HAL_GPIO_WritePin(lcd_mosi_GPIO_Port,lcd_mosi_Pin, GPIO_PIN_SET )// set IO to low
#define SPI_SCLK_CLR HAL_GPIO_WritePin(lcd_sck_GPIO_Port,lcd_sck_Pin, GPIO_PIN_RESET )
#define SPI_MOSI_CLR HAL_GPIO_WritePin(lcd_mosi_GPIO_Port,lcd_mosi_Pin, GPIO_PIN_RESET )#define SPI_MISO_READ ((HAL_GPIO_ReadPin(lcd_miso_GPIO_Port, lcd_miso_Pin) == GPIO_PIN_SET)?1:0) void SPI_WriteByte(uint8_t Byte);
uint8_t SPI_ReadByte(void);
void lcd_delay_us(uint32_t us);#endif /* __LCD_SPI_H */2)实现SPI的读写接口
#include "lcd_spi.h"void lcd_delay_us(uint32_t us)
{uint32_t i=0;while(us--){for(i=0;i<1000;i++);}
}void SPI_WriteByte(uint8_t Byte)
{uint8_t i=0;for(i=0;i<8;i++){if(Byte&0x80){SPI_MOSI_SET;}else{SPI_MOSI_CLR;}SPI_SCLK_CLR;SPI_SCLK_SET;Byte<<=1;}
} uint8_t SPI_ReadByte(void)
{uint8_t value=0,i=0,byte=0xFF;for(i=0;i<8;i++){value<<=1;if(byte&0x80){SPI_MOSI_SET;}else{SPI_MOSI_CLR;}byte<<=1;SPI_SCLK_CLR;lcd_delay_us(100);if(SPI_MISO_READ){value += 1;}SPI_SCLK_SET;lcd_delay_us(100);}return value;
} 2.3 实现LCD的驱动
在该文件中实现初始化LCD,读写point等接口函数
#include "lcd_drv.h"
#include "lcd_spi.h"_lcd_dev lcddev;void LCD_WR_REG(uint8_t data)
{ LCD_CS_CLR;LCD_RS_CLR; SPI_WriteByte(data);LCD_CS_SET;
}void LCD_WR_DATA(uint8_t data)
{LCD_CS_CLR;LCD_RS_SET;SPI_WriteByte(data);LCD_CS_SET;
}uint8_t LCD_RD_DATA(void)
{uint8_t data;LCD_CS_CLR;LCD_RS_SET;data = SPI_ReadByte();LCD_CS_SET;return data;
}void LCD_WriteReg(uint8_t LCD_Reg, uint16_t LCD_RegValue)
{LCD_WR_REG(LCD_Reg); LCD_WR_DATA(LCD_RegValue);
}uint8_t LCD_ReadReg(uint8_t LCD_Reg)
{LCD_WR_REG(LCD_Reg);return LCD_RD_DATA();
}void LCD_WriteRAM_Prepare(void)
{LCD_WR_REG(lcddev.wramcmd);
}void Lcd_WriteData_16Bit(uint16_t Data)
{LCD_CS_CLR;LCD_RS_SET;SPI_WriteByte(Data>>8);SPI_WriteByte(Data);LCD_CS_SET;
}uint16_t Lcd_ReadData_16Bit(void)
{uint16_t r,g;LCD_CS_CLR;LCD_RS_CLR;SPI_WriteByte(lcddev.rramcmd);LCD_RS_SET;SPI_ReadByte();r = SPI_ReadByte();g = SPI_ReadByte();LCD_CS_SET;r<<=8;r|=g;return r;
}void LCD_DrawPoint(uint16_t x,uint16_t y, uint16_t color)
{LCD_SetCursor(x,y); //set the position Lcd_WriteData_16Bit(color);
}uint16_t LCD_ReadPoint(uint16_t x,uint16_t y)
{uint16_t color;LCD_SetCursor(x,y); //set the position color = Lcd_ReadData_16Bit();return color;
}void LCD_Clear(uint16_t Color)
{uint16_t i,m; LCD_SetWindows(0,0,lcddev.width-1,lcddev.height-1);LCD_CS_CLR;LCD_RS_SET;for(i=0;i<lcddev.height;i++){for(m=0;m<lcddev.width;m++){SPI_WriteByte(Color>>8);SPI_WriteByte(Color);}}LCD_CS_SET;
} void LCD_SetWindows(uint16_t xStar, uint16_t yStar,uint16_t xEnd,uint16_t yEnd)
{LCD_WR_REG(lcddev.setxcmd);LCD_WR_DATA(xStar>>8);LCD_WR_DATA(0x00FF&xStar);LCD_WR_DATA(xEnd>>8);LCD_WR_DATA(0x00FF&xEnd);LCD_WR_REG(lcddev.setycmd);LCD_WR_DATA(yStar>>8);LCD_WR_DATA(0x00FF&yStar);LCD_WR_DATA(yEnd>>8);LCD_WR_DATA(0x00FF&yEnd);LCD_WriteRAM_Prepare(); // prepare the RAM
} void LCD_SetCursor(uint16_t Xpos, uint16_t Ypos)
{LCD_SetWindows(Xpos,Ypos,Xpos,Ypos);
}void LCD_direction(uint8_t direction)
{ lcddev.setxcmd=0x2A;lcddev.setycmd=0x2B;lcddev.wramcmd=0x2C;lcddev.rramcmd=0x2E;lcddev.dir = direction%4;switch(lcddev.dir){ case 0:lcddev.width=LCD_W;lcddev.height=LCD_H;LCD_WriteReg(0x36,(1<<3)|(1<<6));break;case 1:lcddev.width=LCD_H;lcddev.height=LCD_W;LCD_WriteReg(0x36,(1<<3)|(1<<5));break;case 2:lcddev.width=LCD_W;lcddev.height=LCD_H;LCD_WriteReg(0x36,(1<<3)|(1<<7));break;case 3:lcddev.width=LCD_H;lcddev.height=LCD_W;LCD_WriteReg(0x36,(1<<3)|(1<<7)|(1<<6)|(1<<5));break;default:break;}
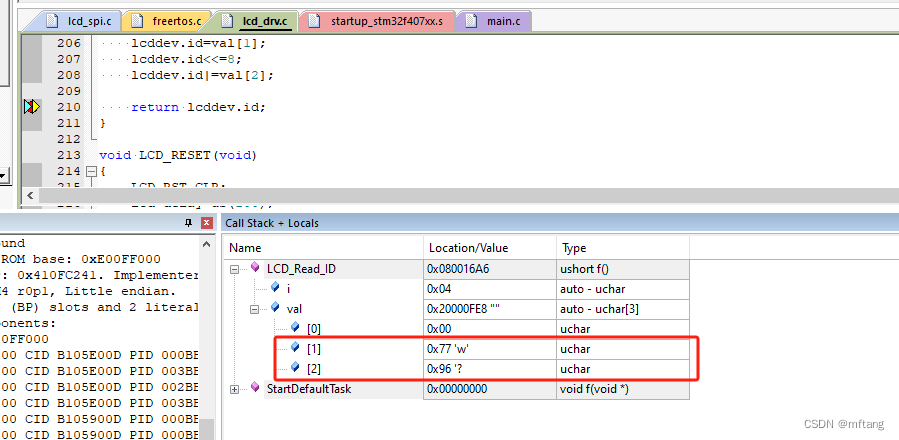
} uint16_t LCD_Read_ID(void)
{uint8_t i,val[3] = {0};LCD_WR_REG(0xF0); // Command Set ControlLCD_WR_DATA(0xC3); LCD_WR_REG(0xF0); LCD_WR_DATA(0x96); LCD_CS_CLR;for(i=1;i<4;i++){LCD_RS_CLR; SPI_WriteByte(0xFB);LCD_RS_SET;SPI_WriteByte(0x10+i);LCD_RS_CLR; SPI_WriteByte(0xD3);LCD_RS_SET;val[i-1] = SPI_ReadByte();LCD_RS_CLR; SPI_WriteByte(0xFB);LCD_RS_SET;SPI_WriteByte(0x00);}LCD_CS_SET;LCD_WR_REG(0xF0); // Command Set ControlLCD_WR_DATA(0x3C); LCD_WR_REG(0xF0); LCD_WR_DATA(0x69); lcddev.id=val[1];lcddev.id<<=8;lcddev.id|=val[2];return lcddev.id;
}void LCD_RESET(void)
{LCD_RST_CLR;lcd_delay_us(100);LCD_RST_SET;lcd_delay_us(50);
}void LCD_Init(void)
{ LCD_RESET(); // reset the LCD//*************3.5 ST7796S IPS pannel **********LCD_WR_REG(0x11); lcd_delay_us(120); //Delay 120mslcd_delay_us(120); //Delay 120msLCD_WR_REG(0x36); // Memory Data Access Control MY,MX~~LCD_WR_DATA(0x48); LCD_WR_REG(0x3A); LCD_WR_DATA(0x55); LCD_WR_REG(0xF0); // Command Set ControlLCD_WR_DATA(0xC3); LCD_WR_REG(0xF0); LCD_WR_DATA(0x96); LCD_WR_REG(0xB4); LCD_WR_DATA(0x01); LCD_WR_REG(0xB7); LCD_WR_DATA(0xC6); //LCD_WR_REG(0xB9); //LCD_WR_DATA(0x02);//LCD_WR_DATA(0xE0);LCD_WR_REG(0xC0); LCD_WR_DATA(0x80); LCD_WR_DATA(0x45); LCD_WR_REG(0xC1); LCD_WR_DATA(0x13); //18 //00LCD_WR_REG(0xC2); LCD_WR_DATA(0xA7); LCD_WR_REG(0xC5); LCD_WR_DATA(0x0A); LCD_WR_REG(0xE8); LCD_WR_DATA(0x40);LCD_WR_DATA(0x8A);LCD_WR_DATA(0x00);LCD_WR_DATA(0x00);LCD_WR_DATA(0x29);LCD_WR_DATA(0x19);LCD_WR_DATA(0xA5);LCD_WR_DATA(0x33);LCD_WR_REG(0xE0);LCD_WR_DATA(0xD0);LCD_WR_DATA(0x08);LCD_WR_DATA(0x0F);LCD_WR_DATA(0x06);LCD_WR_DATA(0x06);LCD_WR_DATA(0x33);LCD_WR_DATA(0x30);LCD_WR_DATA(0x33);LCD_WR_DATA(0x47);LCD_WR_DATA(0x17);LCD_WR_DATA(0x13);LCD_WR_DATA(0x13);LCD_WR_DATA(0x2B);LCD_WR_DATA(0x31);LCD_WR_REG(0xE1);LCD_WR_DATA(0xD0);LCD_WR_DATA(0x0A);LCD_WR_DATA(0x11);LCD_WR_DATA(0x0B);LCD_WR_DATA(0x09);LCD_WR_DATA(0x07);LCD_WR_DATA(0x2F);LCD_WR_DATA(0x33);LCD_WR_DATA(0x47);LCD_WR_DATA(0x38);LCD_WR_DATA(0x15);LCD_WR_DATA(0x16);LCD_WR_DATA(0x2C);LCD_WR_DATA(0x32);LCD_WR_REG(0xF0); LCD_WR_DATA(0x3C); LCD_WR_REG(0xF0); LCD_WR_DATA(0x69); lcd_delay_us(120);LCD_WR_REG(0x21); LCD_WR_REG(0x29); LCD_direction(USE_HORIZONTAL); // set the driectionLCD_Clear(GREEN); // clear the screen as green
}/* End of this file */
该driver对应的头文件:
#ifndef __LCD_DRV_H
#define __LCD_DRV_H#include <stdlib.h>
#include <stdio.h>
#include "main.h"//LCD重要参数集
typedef struct
{ uint16_t width; //LCD 宽度uint16_t height; //LCD 高度uint16_t id; //LCD IDuint8_t dir; //横屏还是竖屏控制:0,竖屏;1,横屏。 uint16_t wramcmd; //开始写gram指令uint16_t rramcmd; //开始读gram指令uint16_t setxcmd; //设置x坐标指令uint16_t setycmd; //设置y坐标指令
}_lcd_dev; //LCD参数
extern _lcd_dev lcddev; //管理LCD重要参数/用户配置区///
#define USE_HORIZONTAL 0//定义液晶屏顺时针旋转方向 0-0度旋转,1-90度旋转,2-180度旋转,3-270度旋转//
//定义LCD的尺寸
#define LCD_W 320
#define LCD_H 480//如果使用官方库函数定义下列底层,速度将会下降到14帧每秒,建议采用我司推荐方法
//以下IO定义直接操作寄存器,快速IO操作,刷屏速率可以达到28帧每秒! #define LCD_CS_SET HAL_GPIO_WritePin(lcd_cs_GPIO_Port,lcd_cs_Pin, GPIO_PIN_SET )
#define LCD_RS_SET HAL_GPIO_WritePin(lcd_rs_GPIO_Port,lcd_rs_Pin, GPIO_PIN_SET )
#define LCD_RST_SET HAL_GPIO_WritePin(lcd_rst_GPIO_Port,lcd_rst_Pin, GPIO_PIN_SET )#define LCD_CS_CLR HAL_GPIO_WritePin(lcd_cs_GPIO_Port,lcd_cs_Pin, GPIO_PIN_RESET )
#define LCD_RS_CLR HAL_GPIO_WritePin(lcd_rs_GPIO_Port,lcd_rs_Pin, GPIO_PIN_RESET )
#define LCD_RST_CLR HAL_GPIO_WritePin(lcd_rst_GPIO_Port,lcd_rst_Pin, GPIO_PIN_RESET )//画笔颜色
#define WHITE 0xFFFF
#define BLACK 0x0000
#define BLUE 0x001F
#define BRED 0XF81F
#define GRED 0XFFE0
#define GBLUE 0X07FF
#define RED 0xF800
#define MAGENTA 0xF81F
#define GREEN 0x07E0
#define CYAN 0x7FFF
#define YELLOW 0xFFE0
#define BROWN 0XBC40 //棕色
#define BRRED 0XFC07 //棕红色
#define GRAY 0X8430 //灰色
//GUI颜色#define DARKBLUE 0X01CF //深蓝色
#define LIGHTBLUE 0X7D7C //浅蓝色
#define GRAYBLUE 0X5458 //灰蓝色
//以上三色为PANEL的颜色 #define LIGHTGREEN 0X841F //浅绿色
#define LIGHTGRAY 0XEF5B //浅灰色(PANNEL)
#define LGRAY 0XC618 //浅灰色(PANNEL),窗体背景色#define LGRAYBLUE 0XA651 //浅灰蓝色(中间层颜色)
#define LBBLUE 0X2B12 //浅棕蓝色(选择条目的反色)void LCD_Init(void);
void LCD_DisplayOn(void);
void LCD_DisplayOff(void);
void LCD_Clear(uint16_t Color);
void LCD_SetCursor(uint16_t Xpos, uint16_t Ypos);
void LCD_DrawPoint(uint16_t x,uint16_t y, uint16_t color);
uint16_t LCD_ReadPoint(uint16_t x,uint16_t y); //读点
void LCD_DrawLine(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2);
void LCD_DrawRectangle(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2);
void LCD_SetWindows(uint16_t xStar, uint16_t yStar,uint16_t xEnd,uint16_t yEnd);uint8_t LCD_RD_DATA(void); //读取LCD数据
void LCD_WriteReg(uint8_t LCD_Reg, uint16_t LCD_RegValue);
void LCD_WR_DATA(uint8_t data);
uint8_t LCD_ReadReg(uint8_t LCD_Reg);
void LCD_WriteRAM_Prepare(void);
void LCD_WriteRAM(uint16_t RGB_Code);
uint16_t LCD_ReadRAM(void);
uint16_t LCD_BGR2RGB(uint16_t c);
void LCD_SetParam(void);
void Lcd_WriteData_16Bit(uint16_t Data);
void LCD_direction(uint8_t direction );
uint16_t LCD_Read_ID(void);#endif /* __LCD_DRV_H */3 测试
1)调用接口,并编译项目
LCD_Init(); // 初始化LCD
LCD_Read_ID(); // 读取LCD的驱动芯片ID

2) 运行代码
读取id测试:
清屏测试:
这篇关于使用模拟SPI接口驱动串行接口的LCD( STM32F4)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






