本文主要是介绍Go实现树莓派控制舵机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
公式说明
毫秒(ms)是时间的单位,赫兹(Hz)是频率的单位,而
DutyMax通常是一个PWM(脉冲宽度调制)信号中表示最大占空比的值。以下是它们之间的关系和一些相关公式:
频率(Hz)和周期(T): 频率是每秒周期性事件发生的次数。周期是频率的倒数,表示一个完整周期所需的时间。
f=1/T, T=1/f 其中:
- ( f ) 是频率,单位是赫兹(Hz)。
- ( T ) 是周期,单位是秒(s)。
毫秒(ms)和周期(T): 毫秒是秒的千分之一,通常用于表示较短的时间间隔。
Tms = T * 1000 其中:
- ( Tms ) 是周期,单位是毫秒(ms)。
占空比(Duty Cycle): 占空比是PWM信号中高电平时间与整个周期时间的比例,通常以百分比表示。
Duty Cycle = 高电平时间 / T * 100%
DutyMax和占空比: 在某些库中,DutyMax可能代表PWM信号中最大的占空比值,用于设置PWM的占空比。在代码中,DutyMax可能是一个数值,用于表示100%的占空比。例如,如果DutyMax是255,那么一个50%的占空比将是127.5(DutyMax / 2)。设置特定时间的占空比: 如果你想设置一个特定的高电平时间(例如2.5ms),你需要首先计算出这个时间对应的占空比,然后将其转换为PWM信号中的数值。 [
Duty= 高电平时间ms/ Tms * DutyMax其中:
- Duty 是PWM信号中的占空比数值。
- Tms 是周期,单位是毫秒(ms)。
举个例子,如果频率是50Hz,那么周期
T是20ms。如果你想要一个2.5ms的高电平时间,占空比计算如下:
Duty Cycle = 2.5ms/20ms * 100% = 12.5 %如果
DutyMax代表100%的占空比,并且是255(这是一个常见的值,用于8位PWM信号),那么对应的Duty数值将是:Duty= 12.5%*255/100% = 31.875
在实际应用中,你可能需要将这个值四舍五入到最接近的整数,因为PWM的占空比数值通常是整数。
线路连接
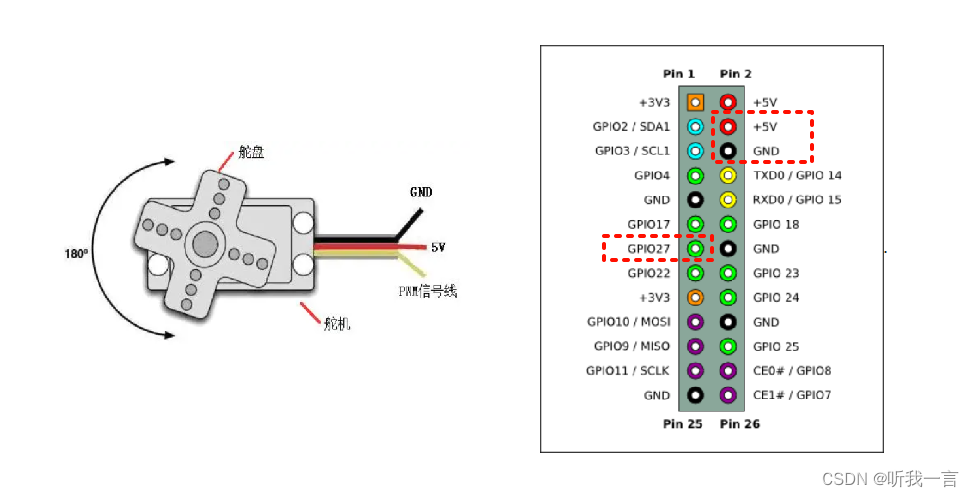
实物连接图

代码
main.go
/*
getDutyCycle: 涉及的公式频率f单位赫兹 = 1/T周期T单位秒 = 1/fTms = 1/f * 1000Duty Cycly = (Th / T) * 100% => Th指高电平时间Duty = Thms/Tms * DutyMax
*/
func getDutyCycle(ms float64, hz int32) gpio.Duty {return gpio.Duty(((ms * float64(hz)) / 1000) * float64(gpio.DutyMax))
}
func main() {if _, err := host.Init(); err != nil {log.Fatalf("failed to initialize host: %v", err)}// 获取GPIO引脚,这里以GPIO18为例pin := gpioreg.ByName("GPIO27")if pin == nil {log.Fatalf("failed to open GPIO pin")}if err := pin.PWM(0, 50*physic.Hertz); err != nil {log.Fatalf("failed to set PWM: %v", err)}
/*占空比 = t / T 相关参数如下:
t = 0.5ms —————— 舵机会转到 -90 °
t = 1.0ms —————— 舵机会转到 -45°
t = 1.5ms —————— 舵机会转到 0°
t = 2.0ms —————— 舵机会转到 45°
t = 2.5ms —————— 舵机会转到 90°
*/duty := getDutyCycle(0.5, 50) //gpio.Duty(int32(float64((gpio.DutyMax / 20)) * 0.5))fmt.Println("DUTY1111111111: ", uint32(gpio.Duty(int32(float64((gpio.DutyMax/20))*0.5))))fmt.Println("DUTY===", uint32(duty), pin.PWM(duty, 50*physic.Hertz))time.Sleep(time.Second)duty = getDutyCycle(1, 50) //gpio.Duty(int32(float64((gpio.DutyMax / 20)) * 0.5))fmt.Println("DUTY===", uint32(duty), pin.PWM(duty, 50*physic.Hertz))time.Sleep(time.Second)duty = getDutyCycle(1.5, 50) //gpio.Duty(int32(float64((gpio.DutyMax / 20)) * 0.5))fmt.Println("DUTY===", uint32(duty), pin.PWM(duty, 50*physic.Hertz))time.Sleep(time.Second)duty = getDutyCycle(2, 50) //gpio.Duty(int32(float64((gpio.DutyMax / 20)) * 0.5))fmt.Println("DUTY===", uint32(duty), pin.PWM(duty, 50*physic.Hertz))time.Sleep(time.Second)duty = getDutyCycle(2.5, 50) //gpio.Duty(int32(float64((gpio.DutyMax / 20)) * 0.5))fmt.Println("DUTY===", uint32(duty), pin.PWM(duty, 50*physic.Hertz))time.Sleep(time.Second)
}
Note
需要sudo运行, 否则报错,例如 : bcm283x-gpio (GPIO27): bcm283x-dma not initialized; try again as root?
参考
RPi Low-level peripherals
Raspberry Pi hardware
这篇关于Go实现树莓派控制舵机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






