本文主要是介绍STM32F407ZGT6 fatfs出现挂载成功,但是文件读写失败的原因,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用正点原子的板子f407,使用野火代码参考博客 2021-07-25 野火板子25MHz晶振改为正点原子8MH晶振_Car12-CSDN博客
参考源码 修复了野火的bug,使用cubemx初始化代码STM32F407ZGT6.zip-嵌入式文档类资源-CSDN下载
主题开始
fatfs 出现挂载成功,但是文件读写失败的原因可能
原因1:
是文件系统损坏,需要在首次挂载文件系统以后重新格式化文件系统
文件系统测试代码
void testfatfs()
{printf("****** 这是一个SPI FLASH 文件系统实验 ******\r\n");SPI_FLASH_Init();HAL_Delay(500);uint32_t id = SPI_FLASH_ReadID();printf("flash id =%x \r\n",id);//在外部SPI Flash挂载文件系统,文件系统挂载时会对SPI设备初始化res_flash = f_mount(&fs,"1:",1);/* 在此处强制格式化一次问价系统 格式化 */
// res_flash=f_mkfs("1:",0,0);
// res_flash = f_mount(NULL,"1:",1);
// /* 重新挂载 */
// res_flash = f_mount(&fs,"1:",1);
/*----------------------- 格式化测试 ---------------------------*/ /* 如果没有文件系统就格式化创建创建文件系统 */if(res_flash == FR_NO_FILESYSTEM){printf("》FLASH还没有文件系统,即将进行格式化...\r\n");/* 格式化 */res_flash=f_mkfs("1:",0,0); if(res_flash == FR_OK){printf("》FLASH已成功格式化文件系统。\r\n");/* 格式化后,先取消挂载 */res_flash = f_mount(NULL,"1:",1); /* 重新挂载 */ res_flash = f_mount(&fs,"1:",1);}else{printf("《《格式化失败。》》\r\n");while(1);}}else if(res_flash!=FR_OK){printf("!!外部Flash挂载文件系统失败。(%d)\r\n",res_flash);printf("!!可能原因:SPI Flash初始化不成功。\r\n");while(1);}else{printf("》文件系统挂载成功,可以进行读写测试\r\n");}/*----------------------- 文件系统测试:写测试 -----------------------------*//* 打开文件,如果文件不存在则创建它 */printf("\r\n****** 即将进行文件写入测试... ******\r\n"); res_flash = f_open(&fnew, "1:FatFs读写测试文件.txt",FA_CREATE_ALWAYS | FA_WRITE );if ( res_flash == FR_OK ){printf("》打开/创建FatFs读写测试文件.txt文件成功,向文件写入数据。\r\n");/* 将指定存储区内容写入到文件内 */res_flash=f_write(&fnew,WriteBuffer,sizeof(WriteBuffer),&fnum);if(res_flash==FR_OK){printf("》文件写入成功,写入字节数据:%d\n",fnum);printf("》向文件写入的数据为:\r\n%s\r\n",WriteBuffer);}else{printf("!!文件写入失败:(%d)\n",res_flash);} /* 不再读写,关闭文件 */f_close(&fnew);}else{ printf("!!打开/创建文件失败。\r\n");}此处强制格式化文件系统,文件系统在使用中断电或者其他原因可能对导致文件系统损坏
// 强制格式化后重新挂载
// res_flash=f_mkfs("1:",0,0);
// res_flash = f_mount(NULL,"1:",1);
// /* 重新挂载 */
// res_flash = f_mount(&fs,"1:",1);原因2:
下面的SPITimeout是一个全局变量,在等待fash执行的时间就是不确定的;影响等待时间,在使用文件系统fatfs时,频繁的写入,就会导致下一次写入数据时,上一次还没有写入完成;这是野火参考代码的坑
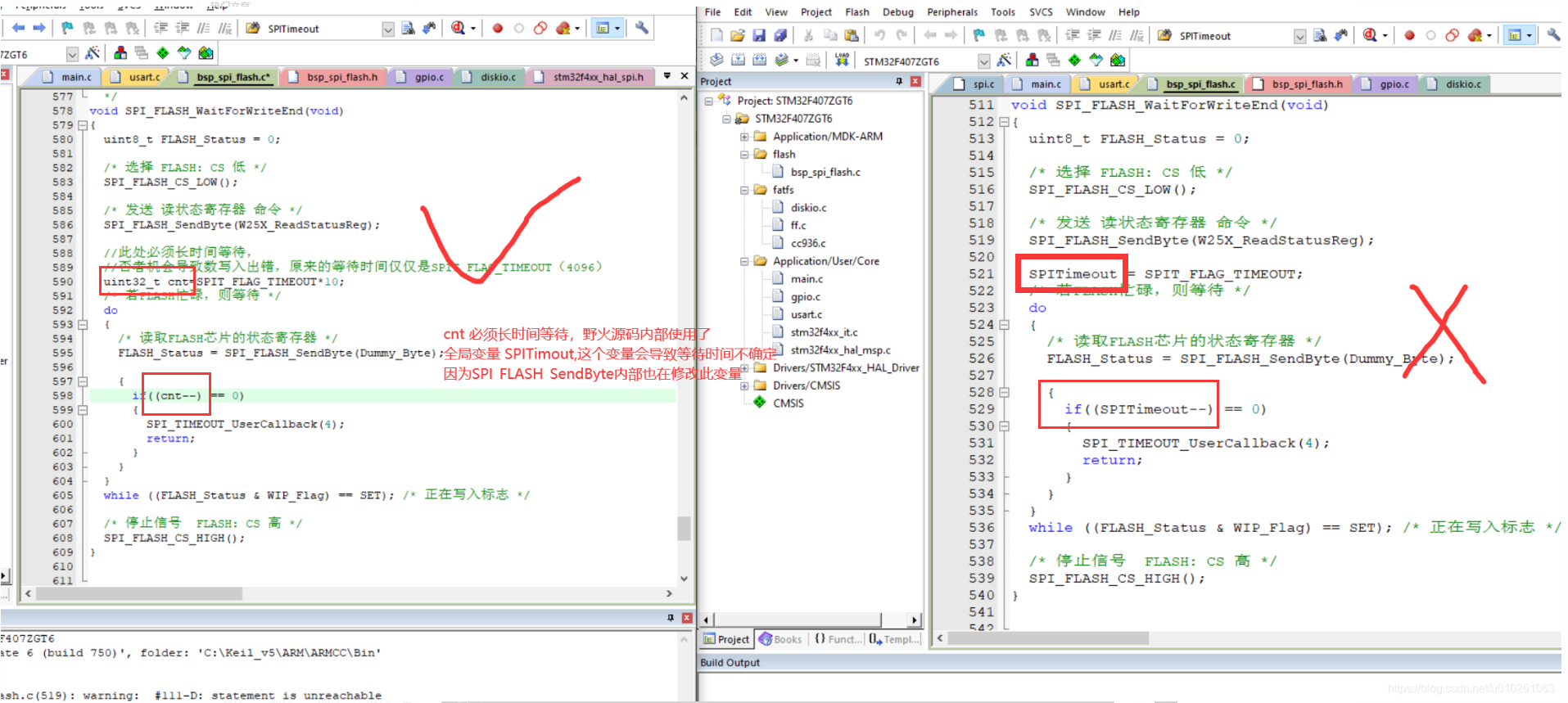
以下是野火代码,略有修改,特别是发送函数;使用野火的等待执行完成函数就是右图导致下边代码无法使用在文件系统(fatfs),只能使用它的代码
/*** @brief 使用SPI发送一个字节的数据* @param byte:要发送的数据* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{uint8_t data;HAL_SPI_TransmitReceive(&SpiHandle,&byte,&data,1,0x1000);return data;}修改后代码:初始化使用cubumx生成的代码
bsp_spi_w25qxx.c
/********************************************************************************* @file bsp_spi_flash.c* @author fire* @version V1.0* @date 2015-xx-xx* @brief spi flash 底层应用函数bsp ******************************************************************************* @attention** 实验平台:野火STM32 F407 开发板* 论坛 :http://www.firebbs.cn* 淘宝 :https://fire-stm32.taobao.com********************************************************************************/#include "bsp_spi_flash.h"SPI_HandleTypeDef SpiHandle;static __IO uint32_t SPITimeout = SPIT_LONG_TIMEOUT; static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode);/*** @brief SPI MSP Initialization * This function configures the hardware resources used in this example: * - Peripheral's clock enable* - Peripheral's GPIO Configuration * @param hspi: SPI handle pointer* @retval None*/
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
// GPIO_InitTypeDef GPIO_InitStruct;
//
// /*##-1- Enable peripherals and GPIO Clocks #################################*/
// /* Enable GPIO TX/RX clock */
// SPIx_SCK_GPIO_CLK_ENABLE();
// SPIx_MISO_GPIO_CLK_ENABLE();
// SPIx_MOSI_GPIO_CLK_ENABLE();
// SPIx_CS_GPIO_CLK_ENABLE();
// /* Enable SPI clock */
// SPIx_CLK_ENABLE();
//
// /*##-2- Configure peripheral GPIO ##########################################*/
// /* SPI SCK GPIO pin configuration */
// GPIO_InitStruct.Pin = SPIx_SCK_PIN;
// GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
// GPIO_InitStruct.Pull = GPIO_PULLUP;
// GPIO_InitStruct.Speed = GPIO_SPEED_FAST;
// GPIO_InitStruct.Alternate = SPIx_SCK_AF;
//
// HAL_GPIO_Init(SPIx_SCK_GPIO_PORT, &GPIO_InitStruct);
//
// /* SPI MISO GPIO pin configuration */
// GPIO_InitStruct.Pin = SPIx_MISO_PIN;
// GPIO_InitStruct.Alternate = SPIx_MISO_AF;
//
// HAL_GPIO_Init(SPIx_MISO_GPIO_PORT, &GPIO_InitStruct);
//
// /* SPI MOSI GPIO pin configuration */
// GPIO_InitStruct.Pin = SPIx_MOSI_PIN;
// GPIO_InitStruct.Alternate = SPIx_MOSI_AF;
// HAL_GPIO_Init(SPIx_MOSI_GPIO_PORT, &GPIO_InitStruct); // GPIO_InitStruct.Pin = FLASH_CS_PIN ;
// GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
// HAL_GPIO_Init(FLASH_CS_GPIO_PORT, &GPIO_InitStruct);
// GPIO_InitTypeDef GPIO_InitStruct = {0};if(hspi->Instance==SPI1){/* USER CODE BEGIN SPI1_MspInit 0 *//* USER CODE END SPI1_MspInit 0 *//* SPI1 clock enable */__HAL_RCC_SPI1_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/**SPI1 GPIO ConfigurationPB3 ------> SPI1_SCKPB4 ------> SPI1_MISOPB5 ------> SPI1_MOSI*/GPIO_InitStruct.Pin = GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN SPI1_MspInit 1 *//* USER CODE END SPI1_MspInit 1 */}
}void SPI_FLASH_Init(void)
{/*##-1- Configure the SPI peripheral #######################################*//* Set the SPI parameters */SpiHandle.Instance = SPI1;SpiHandle.Init.Mode = SPI_MODE_MASTER;SpiHandle.Init.Direction = SPI_DIRECTION_2LINES;SpiHandle.Init.DataSize = SPI_DATASIZE_8BIT;SpiHandle.Init.CLKPolarity = SPI_POLARITY_HIGH;SpiHandle.Init.CLKPhase = SPI_PHASE_2EDGE;// SpiHandle.Init.CLKPolarity = SPI_POLARITY_LOW;
// SpiHandle.Init.CLKPhase = SPI_PHASE_1EDGE;SpiHandle.Init.NSS = SPI_NSS_SOFT;SpiHandle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;SpiHandle.Init.FirstBit = SPI_FIRSTBIT_MSB;SpiHandle.Init.TIMode = SPI_TIMODE_DISABLE;SpiHandle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;SpiHandle.Init.CRCPolynomial = 7;if (HAL_SPI_Init(&SpiHandle) != HAL_OK){//Error_Handler();}/* USER CODE BEGIN SPI1_Init 2 */
__HAL_SPI_ENABLE(&SpiHandle); /* USER CODE END SPI1_Init 2 */
}/*** @brief 擦除FLASH扇区* @param SectorAddr:要擦除的扇区地址* @retval 无*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr)
{/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();SPI_FLASH_WaitForWriteEnd();/* 擦除扇区 *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送扇区擦除指令*/SPI_FLASH_SendByte(W25X_SectorErase);/*发送擦除扇区地址的高位*/SPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);/* 发送擦除扇区地址的中位 */SPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);/* 发送擦除扇区地址的低位 */SPI_FLASH_SendByte(SectorAddr & 0xFF);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 擦除FLASH扇区,整片擦除* @param 无* @retval 无*/
void SPI_FLASH_BulkErase(void)
{/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 整块 Erase *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送整块擦除指令*/SPI_FLASH_SendByte(W25X_ChipErase);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize* @retval 无*/
void SPI_FLASH_PageWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 写页写指令*/SPI_FLASH_SendByte(W25X_PageProgram);/*发送写地址的高位*/SPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);/*发送写地址的中位*/SPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);/*发送写地址的低位*/SPI_FLASH_SendByte(WriteAddr & 0xFF);if(NumByteToWrite > SPI_FLASH_PerWritePageSize){NumByteToWrite = SPI_FLASH_PerWritePageSize;FLASH_ERROR("SPI_FLASH_PageWrite too large!");}/* 写入数据*/while (NumByteToWrite--){/* 发送当前要写入的字节数据 */SPI_FLASH_SendByte(*pBuffer);/* 指向下一字节数据 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待写入完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度* @retval 无*/
void SPI_FLASH_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/Addr = WriteAddr % SPI_FLASH_PageSize;/*差count个数据值,刚好可以对齐到页地址*/count = SPI_FLASH_PageSize - Addr; /*计算出要写多少整数页*/NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;/*mod运算求余,计算出剩余不满一页的字节数*/NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;/* Addr=0,则WriteAddr 刚好按页对齐 aligned */if (Addr == 0) {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);}else /* NumByteToWrite > SPI_FLASH_PageSize */{/*先把整数页都写了*/while (NumOfPage--){SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}/* 若地址与 SPI_FLASH_PageSize 不对齐 */else {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {/*当前页剩余的count个位置比NumOfSingle小,写不完*/if (NumOfSingle > count) {temp = NumOfSingle - count;/*先写满当前页*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*再写剩余的数据*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);}else /*当前页剩余的count个位置能写完NumOfSingle个数据*/{ SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);}}else /* NumByteToWrite > SPI_FLASH_PageSize */{/*地址不对齐多出的count分开处理,不加入这个运算*/NumByteToWrite -= count;NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*把整数页都写了*/while (NumOfPage--){SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/if (NumOfSingle != 0){SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}}
}/*** @brief 读取FLASH数据* @param pBuffer,存储读出数据的指针* @param ReadAddr,读取地址* @param NumByteToRead,读取数据长度* @retval 无*/
void SPI_FLASH_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送 读 指令 */SPI_FLASH_SendByte(W25X_ReadData);/* 发送 读 地址高位 */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* 发送 读 地址中位 */SPI_FLASH_SendByte((ReadAddr& 0xFF00) >> 8);/* 发送 读 地址低位 */SPI_FLASH_SendByte(ReadAddr & 0xFF);/* 读取数据 */while (NumByteToRead--){/* 读取一个字节*/*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);/* 指向下一个字节缓冲区 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();
}/*** @brief 读取FLASH ID* @param 无* @retval FLASH ID*/
uint32_t SPI_FLASH_ReadID(void)
{uint32_t Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;/* 开始通讯:CS低电平 */SPI_FLASH_CS_LOW();/* 发送JEDEC指令,读取ID */SPI_FLASH_SendByte(W25X_JedecDeviceID);/* 读取一个字节数据 */Temp0 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp1 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp2 = SPI_FLASH_SendByte(Dummy_Byte);/* 停止通讯:CS高电平 */SPI_FLASH_CS_HIGH();/*把数据组合起来,作为函数的返回值*/Temp = (Temp0 << 16) | (Temp1 << 8) | Temp2;return Temp;
}/*** @brief 读取FLASH Device ID* @param 无* @retval FLASH Device ID*/
uint32_t SPI_FLASH_ReadDeviceID(void)
{uint32_t Temp = 0;/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "RDID " instruction */SPI_FLASH_SendByte(W25X_DeviceID);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);/* Read a byte from the FLASH */Temp = SPI_FLASH_SendByte(Dummy_Byte);/* Deselect the FLASH: Chip Select high */SPI_FLASH_CS_HIGH();return Temp;
}
/*******************************************************************************
* Function Name : SPI_FLASH_StartReadSequence
* Description : Initiates a read data byte (READ) sequence from the Flash.
* This is done by driving the /CS line low to select the device,
* then the READ instruction is transmitted followed by 3 bytes
* address. This function exit and keep the /CS line low, so the
* Flash still being selected. With this technique the whole
* content of the Flash is read with a single READ instruction.
* Input : - ReadAddr : FLASH's internal address to read from.
* Output : None
* Return : None
*******************************************************************************/
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr)
{/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "Read from Memory " instruction */SPI_FLASH_SendByte(W25X_ReadData);/* Send the 24-bit address of the address to read from -----------------------*//* Send ReadAddr high nibble address byte */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* Send ReadAddr medium nibble address byte */SPI_FLASH_SendByte((ReadAddr& 0xFF00) >> 8);/* Send ReadAddr low nibble address byte */SPI_FLASH_SendByte(ReadAddr & 0xFF);
}/*** @brief 使用SPI读取一个字节的数据* @param 无* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_ReadByte(void)
{return (SPI_FLASH_SendByte(Dummy_Byte));
}/*** @brief 使用SPI发送一个字节的数据* @param byte:要发送的数据* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{uint8_t data;HAL_SPI_TransmitReceive(&SpiHandle,&byte,&data,1,0x1000);return data;}/*******************************************************************************
* Function Name : SPI_FLASH_SendHalfWord
* Description : Sends a Half Word through the SPI interface and return the
* Half Word received from the SPI bus.
* Input : Half Word : Half Word to send.
* Output : None
* Return : The value of the received Half Word.
*******************************************************************************/
uint16_t SPI_FLASH_SendHalfWord(uint16_t HalfWord)
{SPITimeout = SPIT_FLAG_TIMEOUT;/* Loop while DR register in not emplty */while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_TXE ) == RESET){if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(2);}/* Send Half Word through the SPIx peripheral */WRITE_REG(SpiHandle.Instance->DR, HalfWord);SPITimeout = SPIT_FLAG_TIMEOUT;/* Wait to receive a Half Word */while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_RXNE ) == RESET){if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(3);}/* Return the Half Word read from the SPI bus */return READ_REG(SpiHandle.Instance->DR);
}/*** @brief 向FLASH发送 写使能 命令* @param none* @retval none*/
void SPI_FLASH_WriteEnable(void)
{/* 通讯开始:CS低 */SPI_FLASH_CS_LOW();/* 发送写使能命令*/SPI_FLASH_SendByte(W25X_WriteEnable);/*通讯结束:CS高 */SPI_FLASH_CS_HIGH();
}/*** @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕* @param none* @retval none*/
void SPI_FLASH_WaitForWriteEnd(void)
{uint8_t FLASH_Status = 0;/* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 读状态寄存器 命令 */SPI_FLASH_SendByte(W25X_ReadStatusReg);//此处必须长时间等待,//否者机会导致数写入出错,原来的等待时间仅仅是SPIT_FLAG_TIMEOUT(4096)uint32_t cnt=SPIT_FLAG_TIMEOUT*10; /* 若FLASH忙碌,则等待 */do{/* 读取FLASH芯片的状态寄存器 */FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte); {if((cnt--) == 0) {SPI_TIMEOUT_UserCallback(4);return;}} }while ((FLASH_Status & WIP_Flag) == SET); /* 正在写入标志 *//* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
}//进入掉电模式
void SPI_Flash_PowerDown(void)
{ /* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 掉电 命令 */SPI_FLASH_SendByte(W25X_PowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
} //唤醒
void SPI_Flash_WAKEUP(void)
{/*选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发上 上电 命令 */SPI_FLASH_SendByte(W25X_ReleasePowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH(); //等待TRES1
} /*** @brief 等待超时回调函数* @param None.* @retval None.*/
static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode)
{/* 等待超时后的处理,输出错误信息 */FLASH_ERROR("SPI 等待超时!errorCode = %d",errorCode);return 0;
}/*********************************************END OF FILE**********************/
bsp_spi_w25qxx.h
#ifndef __SPI_FLASH_H
#define __SPI_FLASH_H#include "stm32f4xx.h"
#include <stdio.h>/* Private typedef -----------------------------------------------------------*/
//#define sFLASH_ID 0xEF3015 //W25X16
//#define sFLASH_ID 0xEF4015 //W25Q16
//#define sFLASH_ID 0XEF4017 //W25Q64
#define sFLASH_ID 0XEF4018 //W25Q128//#define SPI_FLASH_PageSize 4096
#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256/* Private define ------------------------------------------------------------*/
/*命令定义-开头*******************************/
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F #define WIP_Flag 0x01 /* Write In Progress (WIP) flag */
#define Dummy_Byte 0xFF
/*命令定义-结尾*******************************///SPI号及时钟初始化函数
#define SPIx SPI1
#define SPIx_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE()
#define SPIx_SCK_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_MISO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_MOSI_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_CS_GPIO_CLK_ENABLE() __HAL_RCC_GPIOG_CLK_ENABLE() #define SPIx_FORCE_RESET() __HAL_RCC_SPI1_FORCE_RESET()
#define SPIx_RELEASE_RESET() __HAL_RCC_SPI1_RELEASE_RESET()//SCK引脚
#define SPIx_SCK_PIN GPIO_PIN_3
#define SPIx_SCK_GPIO_PORT GPIOB
#define SPIx_SCK_AF GPIO_AF5_SPI1
//MISO引脚
#define SPIx_MISO_PIN GPIO_PIN_4
#define SPIx_MISO_GPIO_PORT GPIOB
#define SPIx_MISO_AF GPIO_AF5_SPI1
//MOSI引脚
#define SPIx_MOSI_PIN GPIO_PIN_5
#define SPIx_MOSI_GPIO_PORT GPIOB
#define SPIx_MOSI_AF GPIO_AF5_SPI1
//CS(NSS)引脚
#define FLASH_CS_PIN GPIO_PIN_14
#define FLASH_CS_GPIO_PORT GPIOB
//设置为高电平
#define digitalHi(p,i) {p->BSRR=i;}
//输出低电平
#define digitalLo(p,i) {p->BSRR=(uint32_t)i << 16;}
#define SPI_FLASH_CS_LOW() digitalLo(FLASH_CS_GPIO_PORT,FLASH_CS_PIN )
#define SPI_FLASH_CS_HIGH() digitalHi(FLASH_CS_GPIO_PORT,FLASH_CS_PIN )
/*SPI接口定义-结尾****************************//*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))/*信息输出*/
#define FLASH_DEBUG_ON 1#define FLASH_INFO(fmt,arg...) printf("<<-FLASH-INFO->> "fmt"\n",##arg)
#define FLASH_ERROR(fmt,arg...) printf("<<-FLASH-ERROR->> "fmt"\n",##arg)
#define FLASH_DEBUG(fmt,arg...) do{\if(FLASH_DEBUG_ON)\printf("<<-FLASH-DEBUG->> [%d]"fmt"\n",__LINE__, ##arg);\}while(0)void SPI_FLASH_Init(void);
void SPI_FLASH_SectorErase(uint32_t SectorAddr);
void SPI_FLASH_BulkErase(void);
void SPI_FLASH_PageWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
void SPI_FLASH_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
void SPI_FLASH_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead);
uint32_t SPI_FLASH_ReadID(void);
uint32_t SPI_FLASH_ReadDeviceID(void);
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr);
void SPI_Flash_PowerDown(void);
void SPI_Flash_WAKEUP(void);uint8_t SPI_FLASH_ReadByte(void);
uint8_t SPI_FLASH_SendByte(uint8_t byte);
uint16_t SPI_FLASH_SendHalfWord(uint16_t HalfWord);
void SPI_FLASH_WriteEnable(void);
void SPI_FLASH_WaitForWriteEnd(void);#endif /* __SPI_FLASH_H */这篇关于STM32F407ZGT6 fatfs出现挂载成功,但是文件读写失败的原因的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





