本文主要是介绍orbslam2基础,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 一、 内容概要
- 二、 orbslam2基础介绍
- 三 、 orbslam2安装
- 3.1 安装依赖
- 3.2 安装orbslam2
- 3.3 下载Kitee数据集
- 四、 进行ORBSLAM2仿真
- 五、 心得体会
- 六、 参考链接
一、 内容概要
- orbslam2基础介绍
- orbslam2安装
- orbslam2使用案例:orbslam2+kitti数据集序列图像
二、 orbslam2基础介绍
ORB-SLAM2是一种用于单目、双目和RGB-D摄像头的实时视觉定位与地图构建系统。它是由伦敦帝国学院的Raul Mur-Artal、Juan D. Tardós和J. M. M. Montiel等人开发的,是ORB-SLAM的改进版本。ORB-SLAM2结合了特征提取、跟踪、建图和定位的功能,可以在实时性和鲁棒性之间取得平衡,适用于各种环境和场景。它在计算机视觉和机器人领域得到广泛应用,可以用于自主导航、增强现实、室内导航等多个领域。
优点:
· 实时性:ORB-SLAM2能够在实时性要求较高的情况下进行定位和地图构建,适用于实时应用。
· 鲁棒性:它采用了ORB特征点描述符和RANSAC等方法,对于光照变化、视角变化等场景具有一定的鲁棒性。
· 支持多种摄像头:ORB-SLAM2支持单目、双目和RGB-D摄像头,具有较好的适用性。
· 开源:作为开源项目,ORB-SLAM2具有广泛的用户群体和社区支持,用户可以自由获取和修改源代码。
缺点:
· 对动态场景不稳定:在存在大量动态物体的场景中,ORB-SLAM2可能会出现定位漂移或者地图构建不准确的情况。
· 对重复纹理区域敏感:在具有重复纹理的区域,ORB-SLAM2可能会出现匹配错误的情况,影响定位和地图构建的准确性。
· 对于大规模环境的处理有限:在大规模环境下,ORB-SLAM2可能会受限于内存和计算资源的限制,无法有效处理大规模地图构建和定位任务。
三 、 orbslam2安装
3.1 安装依赖
依赖列表:
- Pangolin0.5
- Eigen3.1以上
- Sophus
- Ceres
- OpenCV
- g2o
- DBoW3
可以从此链接下载:
https://github.com/Gongkaka/slambook2/tree/master/3rdparty
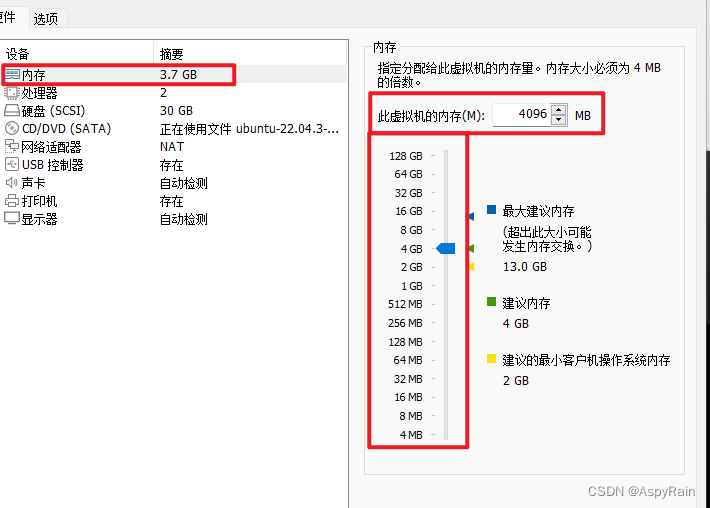
注意!安装过程中出现虚拟机无响应或报错:

请扩充虚拟机内存后重试
下面是具体安装流程
- Pangolin
#若没有从上面链接下载则使用:git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build && cd build
cmake ..
sudo make -j8
sudo make install
- Ceres
#安装依赖
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libgtest-devgit clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver
mkdir ceres-solver-build
cd ceres-solver-build
cmake ..
make -j8
sudo make install
- opencv安装
我多次测试发现orbslam2在opencv版本号为2.-的环境下报错率较低,所以我建议下载opencv2
进入opencv官方下载链接选择2.-版本下载,我下载的是2.4.13.6
cd opencv-2.4.13.6
mkdir build
cd build
cmake -D WITH_TBB=ON -D BUILD_NEW_PYTHON_SUPPORT=ON -D WITH_V4L=ON -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D BUILD_EXAMPLES=ON -D WITH_QT=ON -D WITH_OPENGL=ON ..
漫长的等待
make
sudo make install
完成后开始配置环境
sudo gedit ~/../../etc/ld.so.conf.d/opencv.conf
在里面添加:
/usr/local/lib
保存后
sudo ldconfig
再进入另一个文件
sudo gedit ~/../../etc/bash.bashrc
添加以下两行
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
如果之前安装过其他版本的opencv,添加过这个配置可以不用添加
多版本opencv可以参考这个链接https://blog.csdn.net/learning_tortosie/article/details/80594399
- g2o
#安装依赖:
sudo apt-get install qt5-qmake qt5-default libqglviewer-dev-qt5 libsuitesparse-dev libcxsparse3 libcholmod3
#若没有从上面链接下载则使用:git clone https://github.com/RainerKuemmerle/g2o.git
cd g2o
mkdir build
cd build
cmake ..
make -j8
sudo make install
- DBoW3
#若没有从上面链接下载则使用:git clone https://github.com/stevenlovegrove/Pangolin.git
cd DBoW3
mkdir build
cd build/
cmake ..
make
sudo make install
3.2 安装orbslam2
- 首先新建一个ros工作区(也可以用现有的)
mkdir -p ~/ws_orbslam/src
cd ~/ws_orbslam
catkin_init_workspace src
catkin_make
source devel/setup.bash
然后将orb_slam2下载到主目录
cd ~
git clone https://github.com/raulmur/ORB_SLAM2.git
cd ~/ORB_SLAM2
sudo chmod +x build.sh
./build.sh
然后编译一下
sudo chmod +x build_ros.sh
./build_ros.sh
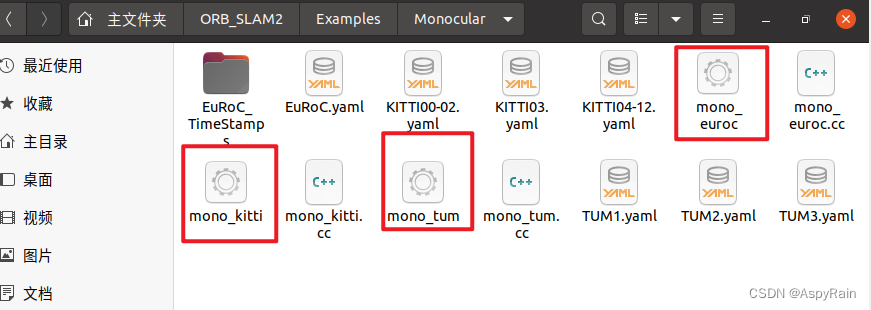
看到进度为100%和拥有这三个文件即视为安装成功

3.3 下载Kitee数据集
官方网站
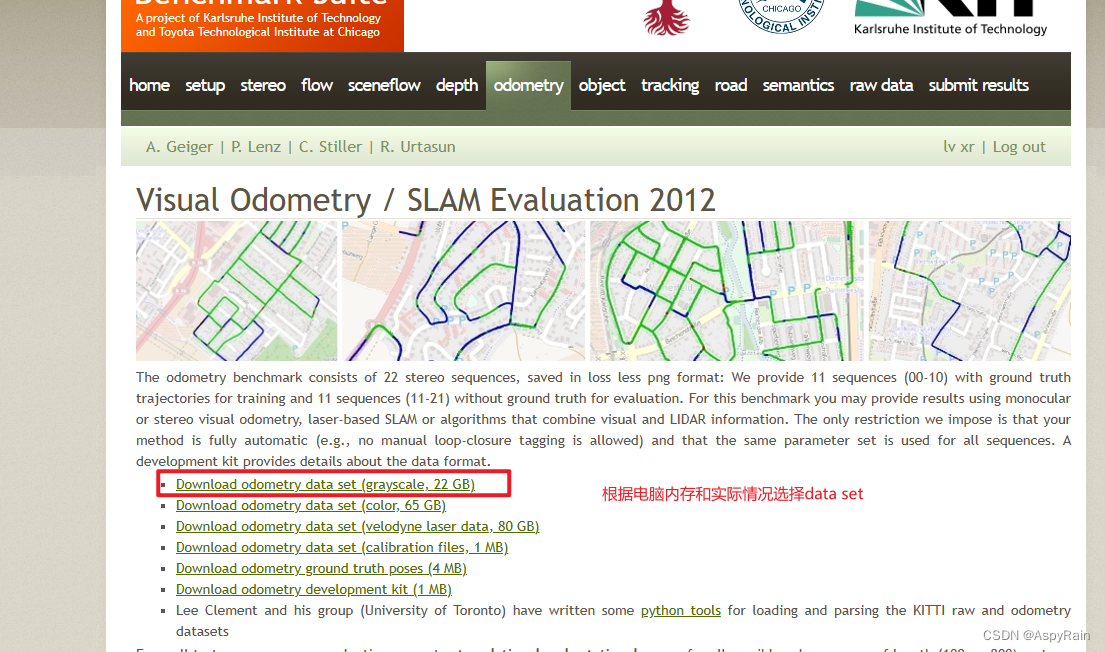
官网下载过程比较繁琐,而且下载速度慢,可以进入以下链接选择下载
https://blog.csdn.net/wyy13273181006/article/details/107686370
可以选择其中一个数据集
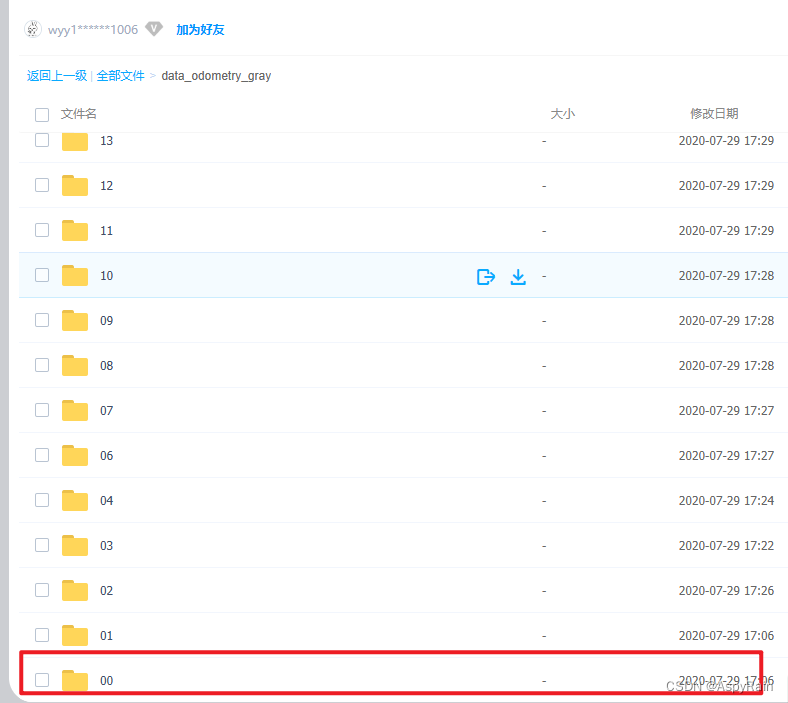
任选
四、 进行ORBSLAM2仿真
进入ORB_SLAM2根目录
最后就是训练集,根据自己文件设置
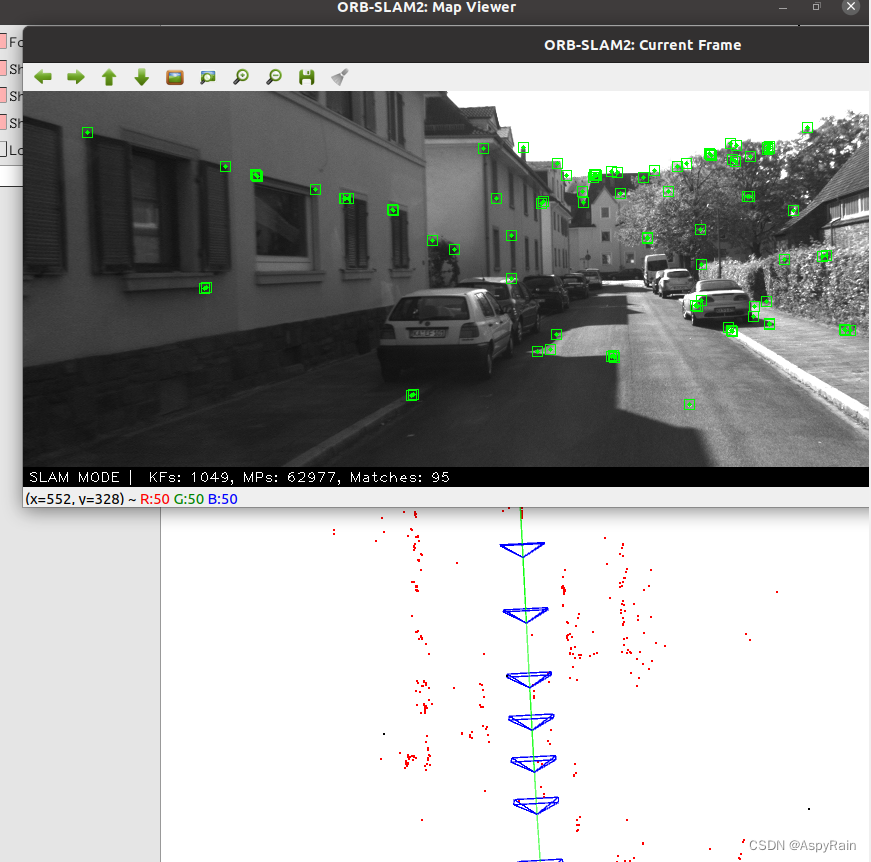
#执行命令:ORB-SLAM2支持单目、双目和RGBD数据,这里选择mono_kitti的单目数据集来运行和调试。
#运行命令格式为:
./mono_kitti path_to_vocabulary path_to_settings path_to_sequence
#该命令共有4个参数:#mono_kitti:为ORB-SLAM2编译生成的针对MONO_KITTI数据集的可执行文件,一般路径为ORB-SLAM2工程目录下Examples/Monocular/mono_kitti;#path_to_vocabulary为所选词典的路径,路径为ORB_SLAM2/Vocabulary/ORBvoc.txt;#path_to_settings为配置文件,存放在ORB-SLAM2/Examples/Monocular下,运行时选择了KITTI00-02.yaml(可选择别的),该配置文件中存放的相机的内参和外参,提取特征时候图像金字塔相关参数,可视化过程中用到的参数;
./mono_kitti ~/ORB_SLAM2/Vocabulary/ORBvoc.txt KITTI00-02.yaml ~/ws_orbslam/src/data_odometry_gray/00/
效果:
常见报错可以参考:
ROS melodic 安装运行 ORB_SLAM2过程及遇到的问题与解决
五、 心得体会
在深入研究和仿真ORB-SLAM2的过程中,我深刻体会到了这个开源视觉SLAM(Simultaneous Localization and Mapping)系统的强大和复杂性。通过实际操作和测试,我对ORB-SLAM2的实时性、鲁棒性和对多种摄像头的支持有了更直观的理解。
首先,ORB-SLAM2的实时性给我留下了深刻的印象。在仿真过程中,系统能够快速地处理输入的图像序列,并实时输出相机的位姿和构建的地图。这对于需要快速响应的应用场景,如自动驾驶和机器人导航,是非常关键的。实时性的实现得益于ORB-SLAM2高效的特征提取和匹配算法,以及优化的地图管理和更新策略。
其次,ORB-SLAM2的鲁棒性也让我感到赞叹。在仿真中,我尝试了各种光照条件、视角变化和动态场景,ORB-SLAM2都能够较好地应对。特别是在光照变化较大的场景中,ORB-SLAM2仍然能够稳定地跟踪和定位,这得益于ORB特征点描述符对光照变化的鲁棒性。此外,ORB-SLAM2还采用了RANSAC等方法来过滤错误的匹配,进一步提高了系统的鲁棒性。
此外,ORB-SLAM2对多种摄像头的支持也让我感到非常满意。在仿真中,我分别测试了单目、双目和RGB-D摄像头的数据,ORB-SLAM2都能够适应并稳定地运行。这种广泛的适用性使得ORB-SLAM2可以应用于各种不同的场景和设备,极大地扩展了其应用范围。
然而,在仿真过程中,我也遇到了一些问题和挑战。首先,ORB-SLAM2对动态场景的处理能力有限。在存在大量动态物体的场景中,ORB-SLAM2可能会出现定位漂移或者地图构建不准确的情况。这需要我们在实际应用中结合其他方法,如语义分割或光流法等,来提高对动态场景的处理能力。
其次,ORB-SLAM2对重复纹理区域敏感。在具有重复纹理的区域,ORB-SLAM2可能会出现匹配错误的情况,影响定位和地图构建的准确性。这需要我们在实际应用中注意选择合适的特征点和匹配策略,以减少这种情况的发生。
最后,ORB-SLAM2在处理大规模环境时可能会受限于内存和计算资源的限制。这需要我们在实际应用中采用一些优化策略,如分块处理、地图压缩等,来降低系统的资源消耗。
总的来说,ORB-SLAM2是一个强大而复杂的视觉SLAM系统,具有实时性、鲁棒性和对多种摄像头的支持等优点。通过仿真和测试,我对其有了更深入的理解,也发现了一些问题和挑战。我相信在未来的研究和应用中,ORB-SLAM2将会得到更广泛的应用和发展。
六、 参考链接
- https://blog.csdn.net/learning_tortosie/article/details/80594399
- https://blog.csdn.net/wakeup_high/article/details/138011781?spm=1001.2014.3001.5502
- https://blog.csdn.net/weixin_56566649/article/details/124355140
- ubuntu 上 opencv2 的安装与配置
- ROS melodic 安装运行 ORB_SLAM2过程及遇到的问题与解决
这篇关于orbslam2基础的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





