本文主要是介绍Crocoddyl 使用教程(二),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
前言
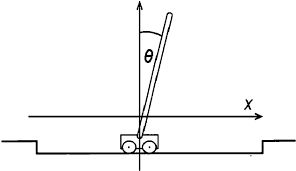
小车摆杆是另一个经典的控制实例。在这个系统中,一根欠驱动的杆子被固定在一辆一维驱动的小车顶部。游戏的目的是将杆子升到站立位置。
模型如下: https://en.wikipedia.org/wiki/Inverted_pendulum
我们用 表示小车质量、
表示摆杆质量 (
)、
表示摆杆长度、
表示摆杆相对于垂直轴的角度、
表示小车位置、
表示重力。
系统加速度可重写为
其中,
其中, 代表输入指令(即
),
代表总质量。
一、 微分动作模型
微分动作模型(DAM)描述的是连续时间内的动作(控制/动力学)。在本练习中,我们要求您编写小车摆杆的运动方程。
更多详情,请参阅 DifferentialActionModelCartpole 类中的说明。
import crocoddyl
import pinocchio
import numpy as np
from IPython.display import HTML
from cartpole_utils import animateCartpoleclass DifferentialActionModelCartpole(crocoddyl.DifferentialActionModelAbstract):def __init__(self):crocoddyl.DifferentialActionModelAbstract.__init__(self, crocoddyl.StateVector(4), 1, 6) # nu = 1; nr = 6self.unone = np.zeros(self.nu)self.m1 = 1.0self.m2 = 0.1self.l = 0.5self.g = 9.81self.costWeights = [1.0,1.0,0.1,0.001,0.001,1.0,] # sin, 1-cos, x, xdot, thdot, fdef calc(self, data, x, u=None):if u is None:u = model.unone# Getting the state and control variablesy, th, ydot, thdot = x[0].item(), x[1].item(), x[2].item(), x[3].item()f = u[0].item()# Shortname for system parametersm1, m2, l, g = self.m1, self.m2, self.l, self.gs, c = np.sin(th), np.cos(th)####################################################################################### TODO: Write the dynamics equation of your system ######################################################################################### Hint:# You don't need to implement integration rules for your dynamic system.# Remember that DAM implemented action models in continuous-time.m = m1 + m2mu = m1 + m2 * s**2xddot, thddot = cartpole_dynamics(self, data, x, u) # Write the cartpole dynamics heredata.xout = np.matrix([xddot, thddot]).T# Computing the cost residual and valuedata.r = np.matrix(self.costWeights * np.array([s, 1 - c, y, ydot, thdot, f])).Tdata.cost = 0.5 * sum(np.asarray(data.r) ** 2).item()def calcDiff(model, data, x, u=None):# Advance user might implement the derivatives in cartpole_analytical_derivativescartpole_analytical_derivatives(model, data, x, u)取消下面一行的注释,就能得到小车摆杆动力学的解:
# %load solutions/cartpole_dyn.py您可能需要检查一下您的计算结果。以下是创建模型和运行计算方法的方法。
cartpoleDAM = DifferentialActionModelCartpole()
cartpoleData = cartpoleDAM.createData()
x = cartpoleDAM.state.rand()
u = np.zeros(1)
cartpoleDAM.calc(cartpoleData, x, u)二、使用 DAMNumDiff 写导数
在前面的练习中,我们没有定义 cartpole 系统的导数。在 crocoddyl 中,我们可以利用 DifferentialActionModelNumDiff 类来计算导数,而无需任何额外代码。该类通过数值微分计算导数。
在下面的单元格中,您需要创建一个使用 NumDiff 计算导数的 cartpole DAM。
# Creating the carpole DAM using NumDiff for computing the derivatives.
# We specify the withGaussApprox=True to have approximation of the
# Hessian based on the Jacobian of the cost residuals.
cartpoleND = crocoddyl.DifferentialActionModelNumDiff(cartpoleDAM, True)使用 NumDiff 创建 cartpole DAM 后。我们希望您能回答以下问题:
- Fx 的 2 列为空。是 Wich 列吗?为什么?
- 能否仔细检查一下 Fu 的值?
# %load solutions/cartpole_fxfu.py三、积分模型
为 cartpole 系统创建 DAM 后。我们需要创建一个积分动模型(IAM)。请注意,IAM 将连续时间动作模型转换为离散时间动作模型。在本练习中,我们将使用简单欧拉积分器。
# %load solutions/cartpole_integration.py
###########################################################################
################## TODO: Create an IAM with from the DAM ##################
###########################################################################
# Hint:
# Use IntegratedActionModelEuler四、编写问题,创建求解器
首先,您需要描述射击问题。为此,您必须说明步的数量及其时间步长。在本练习中,我们希望使用 50 步和 5e-2。
下面是我们创建问题的方法。
# Fill the number of knots (T) and the time step (dt)
x0 = np.array([0.0, 3.14, 0.0, 0.0])
T = 50
problem = crocoddyl.ShootingProblem(x0, [cartpoleIAM] * T, cartpoleIAM)问题不能解决,只能积分:
us = [np.zeros(cartpoleIAM.differential.nu)] * T
xs = problem.rollout(us)在 cartpole_utils 中,我们提供了 plotCartpole 和 animateCartpole 方法。让我们展示一下这个滚动条!
请注意,to_jshtml 会生成视频控制命令。
HTML(animateCartpole(xs).to_jshtml())# %load solutions/cartpole_ddp.py
# #########################################################################
# ################# TODO: Create the DDP solver and run it ###############
# ##########################################################################HTML(animateCartpole(ddp.xs.tolist()).to_jshtml())五、调整问题,解决问题
指出解决问题的方法。
- 没有终端模型,我们可以看到一些波动,但无法稳定下来。怎么办?
- 最重要的是达到站立位置。我们还能使速度失效吗?
- 增加所有权重是行不通的。如何慢慢增加惩罚?
# %load solutions/cartpole_tuning.py
# ##########################################################################
# ################# TODO: Tune the weights for each cost ###################
# ##########################################################################
terminalCartpole = DifferentialActionModelCartpole()
terminalCartpoleDAM = crocoddyl.DifferentialActionModelNumDiff(terminalCartpole, True)
terminalCartpoleIAM = crocoddyl.IntegratedActionModelEuler(terminalCartpoleDAM)terminalCartpole.costWeights[0] = 0 # fix me :)
terminalCartpole.costWeights[1] = 0 # fix me :)
terminalCartpole.costWeights[2] = 0 # fix me :)
terminalCartpole.costWeights[3] = 0 # fix me :)
terminalCartpole.costWeights[4] = 0 # fix me :)
terminalCartpole.costWeights[5] = 0 # fix me :)
problem = crocoddyl.ShootingProblem(x0, [cartpoleIAM] * T, terminalCartpoleIAM)# Creating the DDP solver
ddp = crocoddyl.SolverDDP(problem)
ddp.setCallbacks([crocoddyl.CallbackVerbose()])# Solving this problem
done = ddp.solve([], [], 300)
print(done)
HTML(animateCartpole(ddp.xs.tolist()).to_jshtml())六、使用分析导数
取消下面一行的注释,就能得到分析导数的解:
# %load solutions/cartpole_analytical_derivatives.py
def cartpole_analytical_derivatives(model, data, x, u=None):pass在定义了分析导数后,我们就不需要使用 DAMNumDiff 对导数进行数值逼近了。
timeStep = 5e-2
cartpoleIAM = crocoddyl.IntegratedActionModelEuler(cartpoleDAM, timeStep)现在您可以再次运行 "IV. 编写问题,创建求解器 "中的所有模块,因为 cartpoleIAM 已被重新定义为直接使用解析导数。
这篇关于Crocoddyl 使用教程(二)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


