本文主要是介绍【HAL库 STM32】输入捕获并实现超声波测距,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- HC-SR04 超声波模块简介
- HC-SR04 工作原理
- 如何使用HC-SR04模块
- 程序效果
- 一、工程配置
- 代码
- 如果您发现文章有错误请与我留言,感谢
HC-SR04 超声波模块简介
HC-SR04 工作原理
模块有2个超声波换能器(如图所示),一个发出声波,另一个接收物体反射回来的声波,这中间所经过的时间即声波传播的时间,再结合声速就能计算出:
- 距离 = 声速 * 时间 ÷ 2

如何使用HC-SR04模块
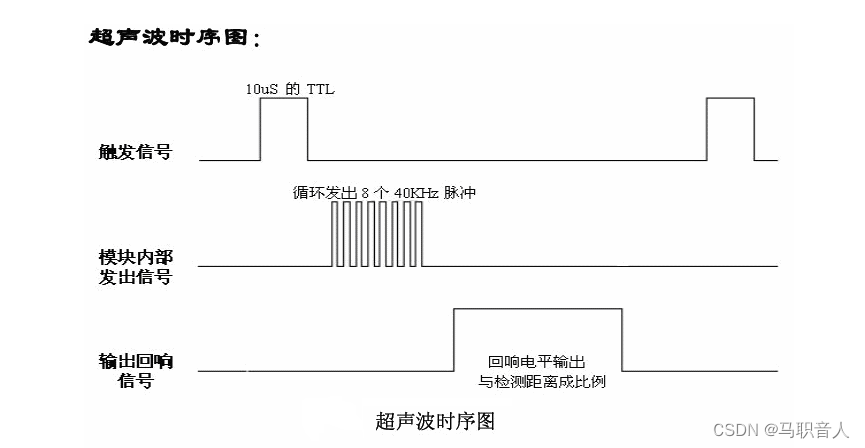
模块具有4个引脚,除了电源外,有TRIG、ECHO两个引脚需要操作:
- 首先,向TRIG引脚发送一个高电平脉冲,来触发模块输出声波
- 记录ECHO引脚输出高电平的时间,即声波的飞行时间
- 距离 = 声速(340m/s) * 声波的飞行时间 ÷ 2
- 连接模块时请核对好线序:

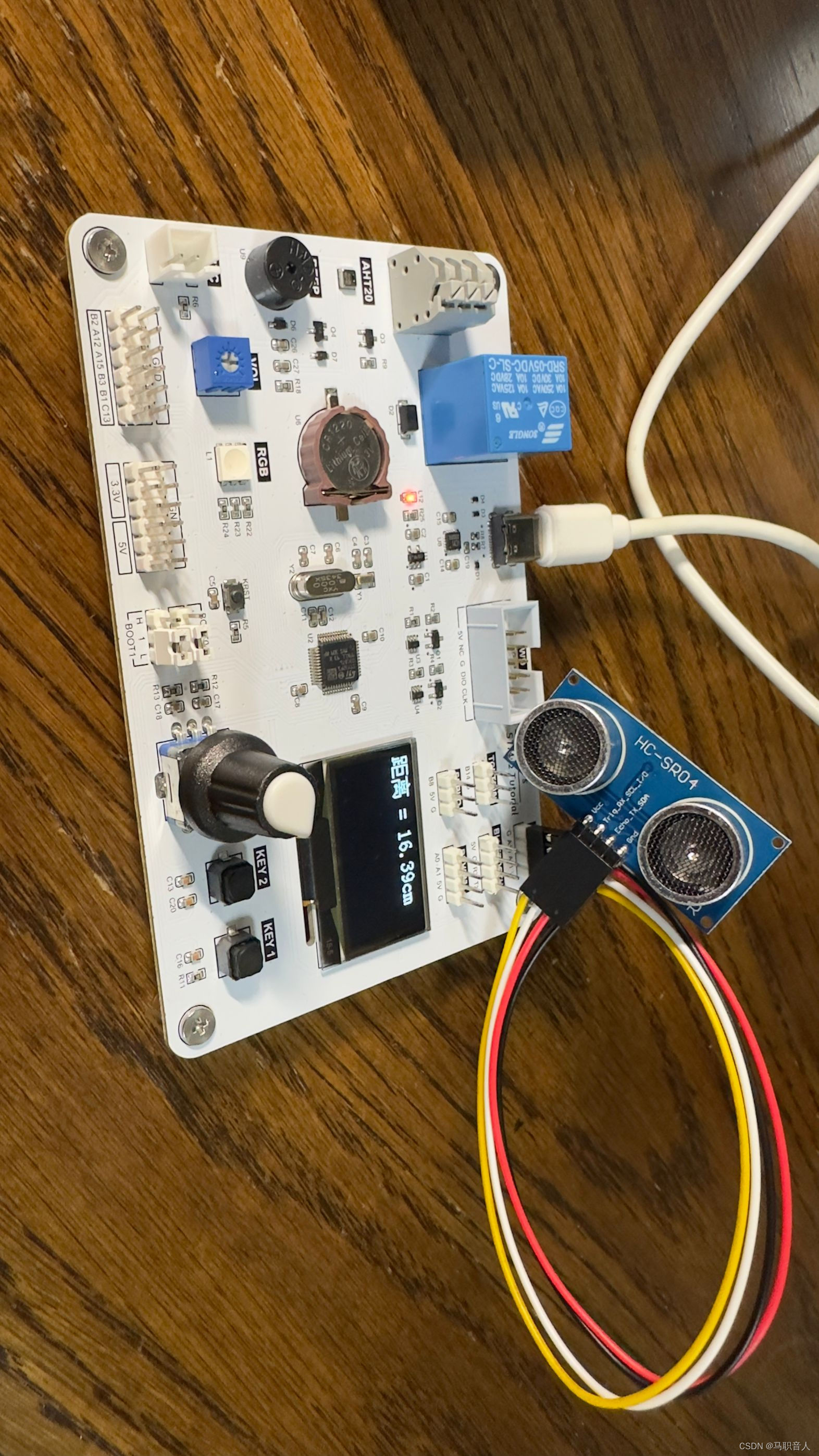
程序效果
一、工程配置
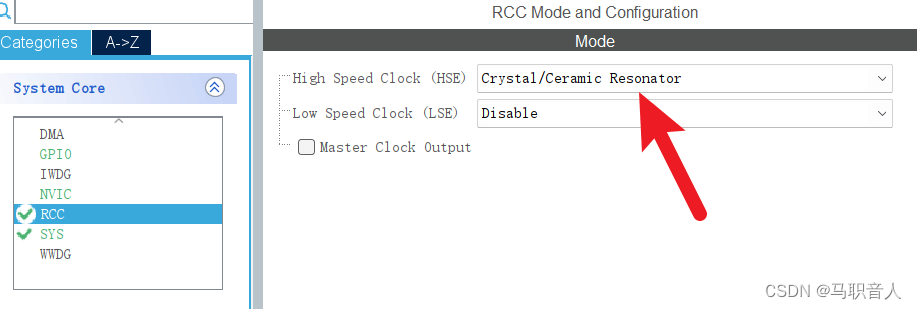
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
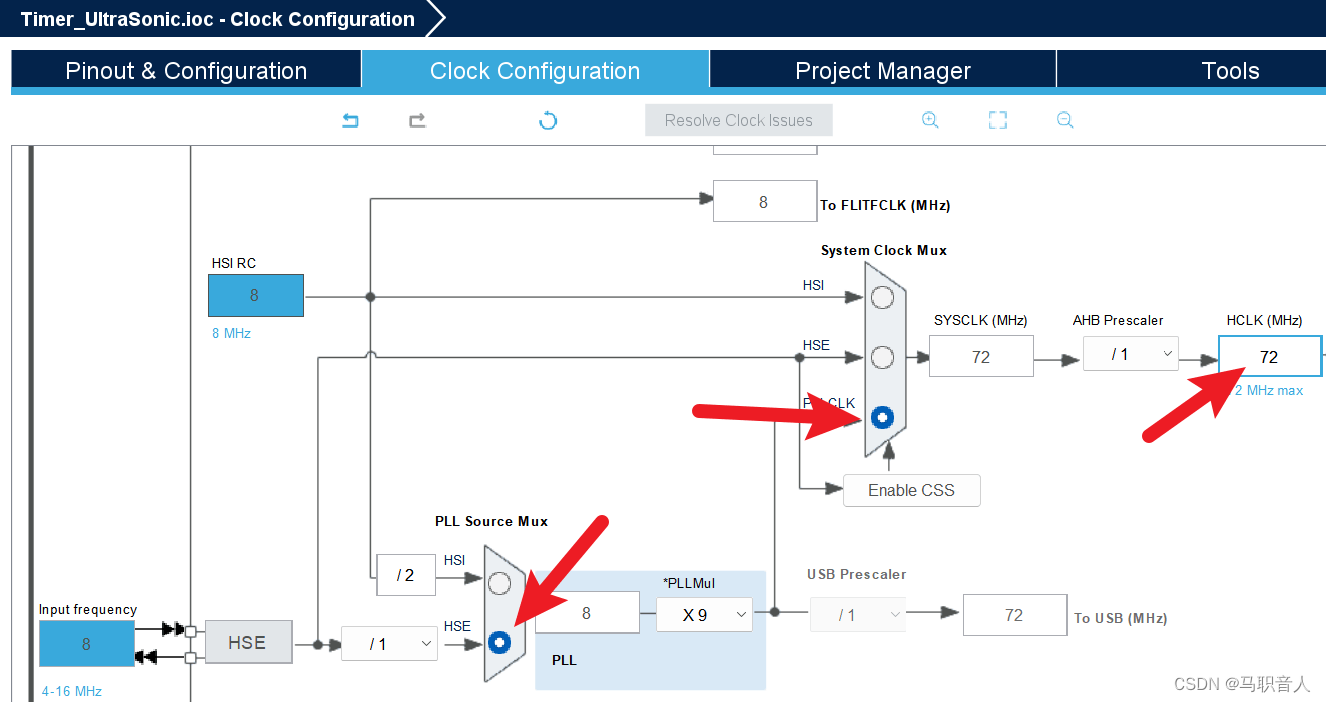
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
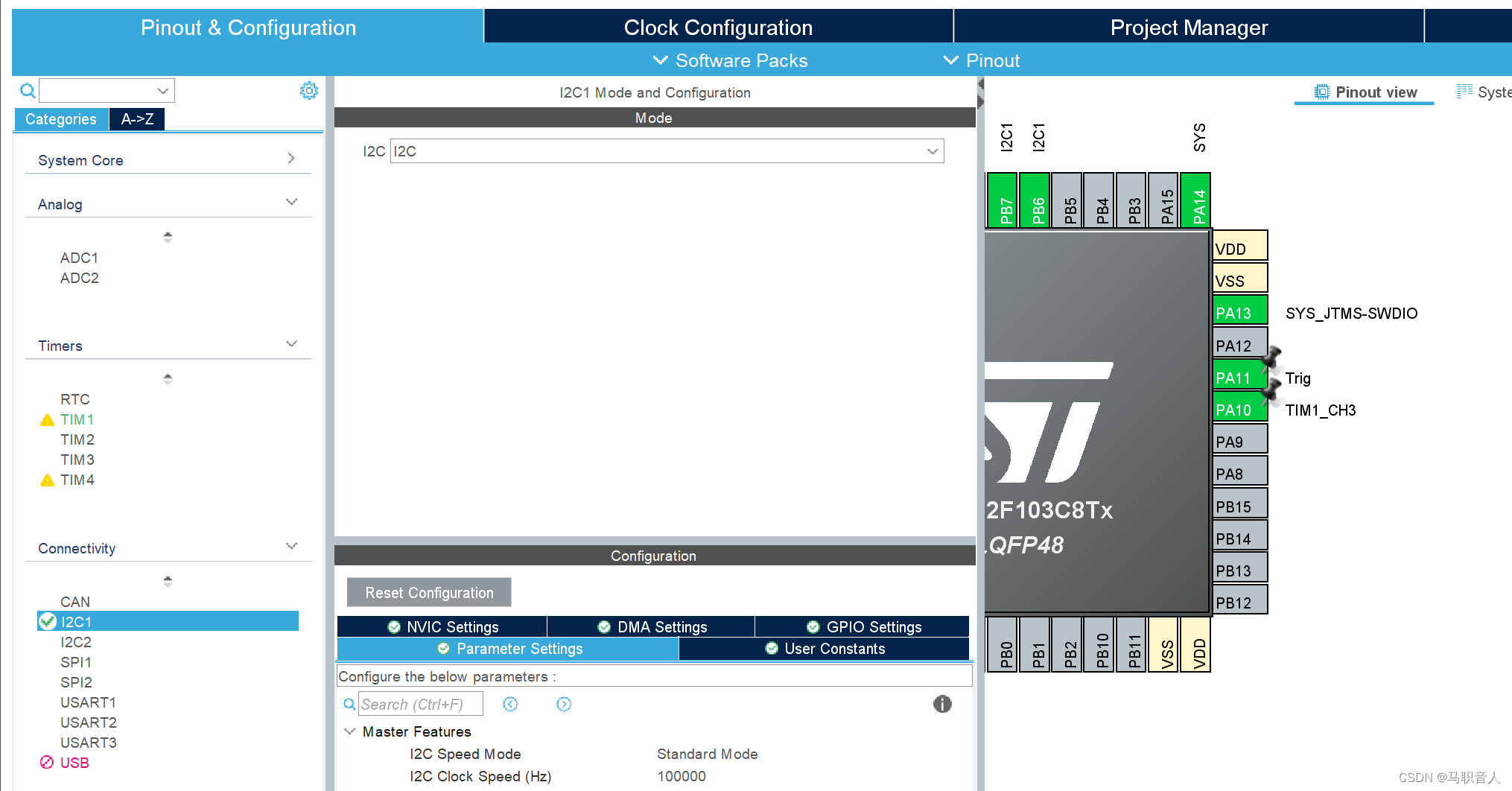
- 分配引脚:在Pinout&Configuration页面,将PA11、PA10分别配置为GPIO_Output、TIM1_CH3,并将PA11命名为TRIG
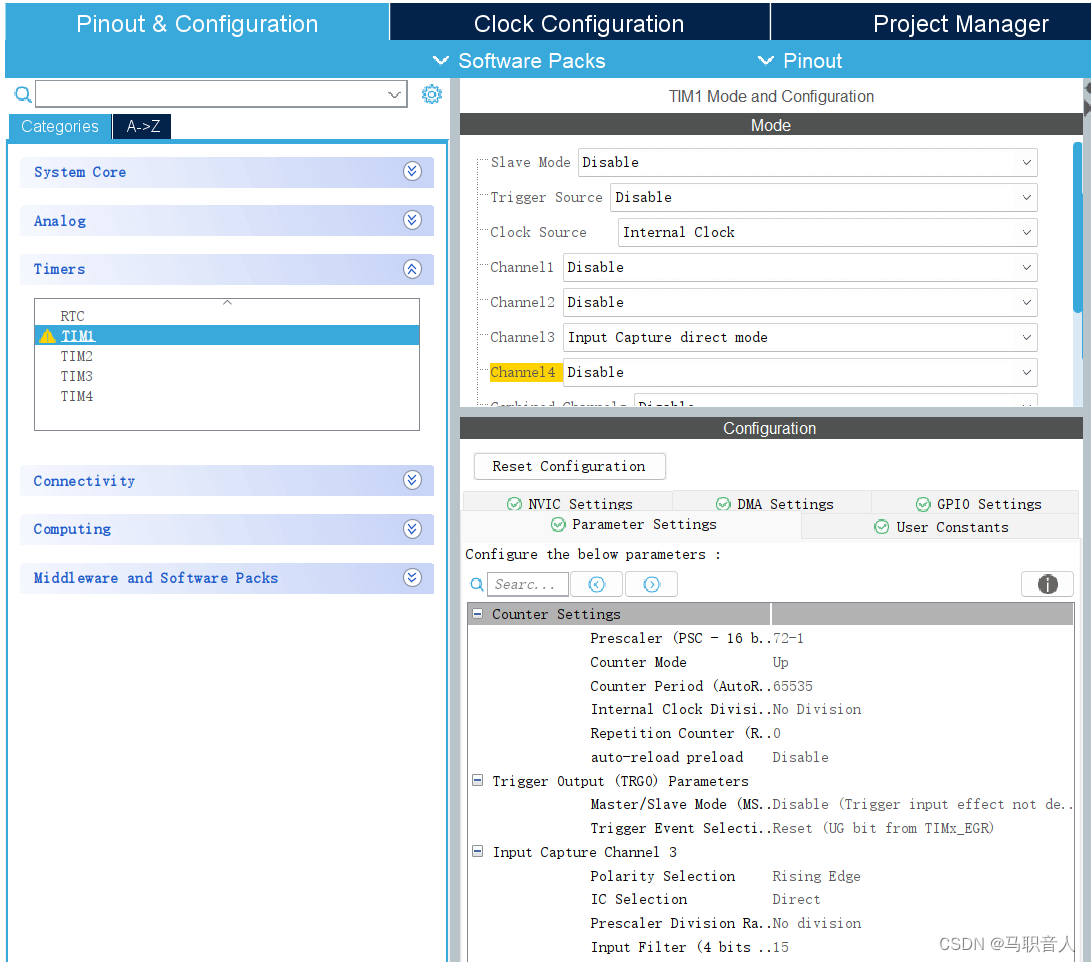
- 配置TIM1:在Pinout&Configuration -> Timers -> TIM1
- Mode -> Clock Source 设为 Internal Clock,Channel3 设为 Input Capture direct mode,即输入捕获
- Configuration -> Parameter Settings -> Counter Settings -> Prescaler 设为 72-1,使定时器计数周期刚好为 1 us
- Configuration -> NVIC Settings -> 勾选TIM1 capture compare interrupt,开启捕获中断
- 打开I2C1
加上.c/.h文件
代码
复制四个文件
我的Github

main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <oled.h>
#include "stdio.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///2 数据计算int upEdge = 0;//获取上升沿时刻计数值
int downEdge = 0;//获取下降沿时刻计数值
float distance = 0;// 输入捕获中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{if(htim == &htim1 && htim -> Channel == HAL_TIM_ACTIVE_CHANNEL_4){//使用捕获寄存器数值的函数HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_3);upEdge = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_3);downEdge = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_4);distance = ((downEdge - upEdge) * 0.034) / 2 ;}
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_I2C1_Init();MX_TIM1_Init();/* USER CODE BEGIN 2 */HAL_Delay(20);OLED_Init();HAL_TIM_Base_Start(&htim1);//启动计时器计数//启用定时器对应通道的输入捕获功能HAL_TIM_IC_Start(&htim1,TIM_CHANNEL_3);//开启通道3的输入捕获//HAL_TIM_IC_Start_IT 当输入信号发生边沿变化时,会触发中断//HAL_TIM_Base_Start_IT 当定时器的计数器溢出时,会触发中断//启动输入捕获HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_4);//开启通道4的输入捕获,启用定时器对应通道的输入捕获功能char message [50] = "";/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){//1 触发测量 2 数据计算 3 数据展示//1 首先触发超声模块测距,先将Trig拉高HAL_GPIO_WritePin(Trig_GPIO_Port, Trig_Pin, GPIO_PIN_SET);//经过一段时间在拉低HAL_GPIO_WritePin(Trig_GPIO_Port, Trig_Pin, GPIO_PIN_RESET);//触发计数器时清零,我们就不用考虑doemEdge > upEdge 的情况了__HAL_TIM_SET_COUNTER(&htim1,0);HAL_Delay(20);//3 数据展示//下来把数据显示在屏幕上//先套上新建针和显示帧的函数OLED_NewFrame();sprintf(message,"距离 = %.2fcm",distance);OLED_PrintString(0, 0, message, &font16x16, OLED_COLOR_NORMAL);OLED_ShowFrame();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */如果您发现文章有错误请与我留言,感谢
这篇关于【HAL库 STM32】输入捕获并实现超声波测距的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






