本文主要是介绍基于电磁激励原理利用视触觉传感器估计抓取力矩的方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
由于触觉感知能使机器人通过其触觉传递获取丰富的接触信息,触觉感知已经成为机器人机械臂的一种流行的感知方式。而在触觉传感器可获取的各种信息中,通过外界接触从抓取物体传递到机器人手指的力矩等信息,在完成各种指令的实现尤为重要。如图所示为通过触点丰富的USB棒插入对齐问题来演示本文所介绍方法。然而,相比于其他传感方式,如力、纹理或滑动识别,触觉力矩估计受到的关注相对较少。
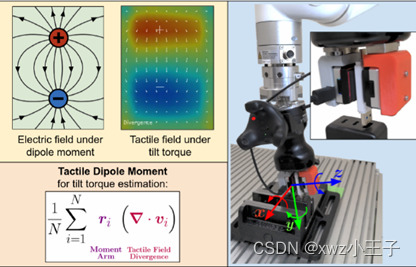
在本文工作中,引入了触觉偶极矩的概念,用于从基于凝胶的触觉传感器中估计倾斜力矩。该方法不依赖于深度学习、传感器特定的机械或光学建模,而是从电机学中获得灵感来分析由2Dmarker位移产生的矢量场。
尽管技术简单,但却展示了它在两个不同的触觉传感器和三个物体几何形状上提供准确的扭矩读数的能力,并突出了它在带有柔顺机械臂的USB棒插入任务中的实用性。
这些结果表明,基于偶极矩的简单解析计算可以充分提取视觉触觉传感器中的物理量。
成果:
•引入了触觉偶极矩(Tactile Dipole Moment)作为一种从视触觉传感器中估计抓取倾斜力矩的方法,并展示了与现有的触觉倾斜力矩估计分析技术相比,新方法在估计精度方面的改进。
•在真实机器人上进行的USB插棒任务实验表明,这种估计可以提供关于环境接触的有用反馈信号。
•这种方法可以应用于其他的视触觉传感硬件和抓取物体形状。
方法:
以机器人手夹取物体,且每个手指上都具有视触觉传感器为例,对其基于触觉偶极矩进行倾斜力矩估计。
由于触觉凝胶表面上不同的加载条件与标记位移场的发散、单向和旋转分量有关。基于此原理,根据倾斜力矩产生的标记位移场图案产生类似于电偶极子诱导的电场的矢量场图案来反映结果。
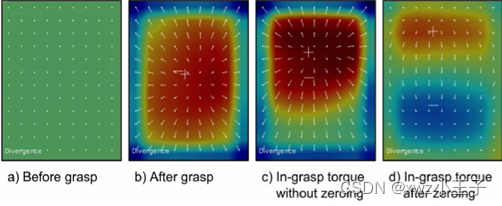
结果表明,偶极子图案只出现在抓取后矢量场归零时的标记位移场中,如图所示。换句话说,标记点位移测量是通过从图像平面中的当前标记点位置减去抓取后的标记点位置来进行的。非此情况下,位移场由法向力引起的分量主导,法向力在抓取过程中保持相对恒定,从而使倾斜力矩的检测变得困难。
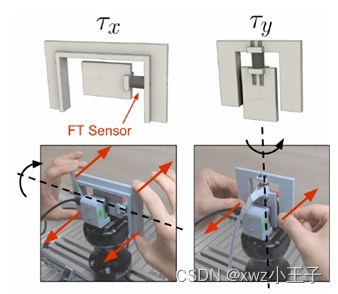
基于上述方法,将其估计的倾斜力矩与使用的小而高分辨率的FT传感器测量的倾斜力矩进行了比较,装置如下图所示。
结果表面,该方法通过矢量散度改进的分布式法向力测量显示出更高的估计精度,正如根据凝胶材料均匀性的原理所预期的那样,触觉估计与FT传感器真值之间的校准比例因子在x轴和y轴之间大致相等。
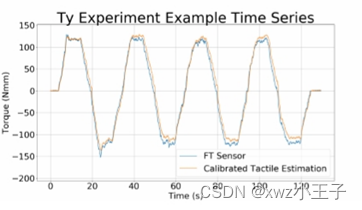
除此之外,当沿着x和y轴的扭矩耦合时,这种线性保持不变,前提是FT传感器与旋转轴成直线放置,以避免产生力矩臂导致人施加的扭矩在FT传感器中被读取为力。下图为单次数据采集实验得到的倾斜力矩估计值与真实值随时间变化的对比图,展示了标定实验在工程单位中利用触觉传感器产生精确力矩读数的实际应用。
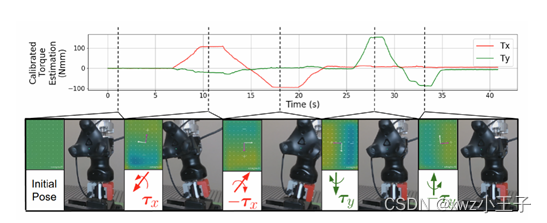
为了证明本文所提及方法测量倾斜力矩的实用性,同时考虑了USB棒插入对齐应用的实验,将扭矩估计方法应用于测量插入物的USB棒的对齐问题。图中显示了估计扭矩(顶部)的时间序列图,以及显示导致扭矩(底部)的USB棒状态的代表性视频快照。
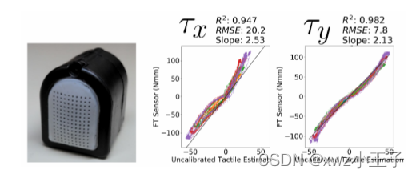
由于这种方法既不依赖于深度学习,也不依赖于传感器特定的力学或光学特性建模,这种方法期望可以直接适用于任何提供2Dmarker位移矢量场的视觉触觉传感器,而唯一的变化来自于从拟合线性模型到真实FT传感器数据的校准缩放常数。该方法应用于DIGIT传感器,通过激光刻蚀将其修改为包含标记,如图所示。
同时,为了评估这种方法对物体形状的泛化能力,下图显示了使用方形和圆形钉子(10mm截面宽度/直径)而不是平板进行相同实验的结果。
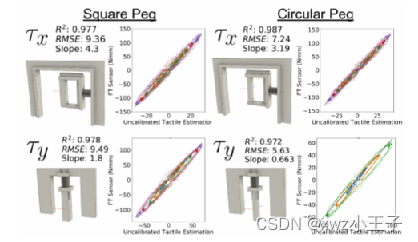
尽管如此,数据的线性度是守恒的,显示了该技术在物体形状上的泛化能力。
讨论与限制:
本文结果展示了如何使用所介绍方法从简单的分析计算中提供准确的倾斜力矩读数。在这一部分中结合现有的相关文献讨论了这些结果的意义和局限性。
•改进倾斜力矩解析估算法:
与现有的通过二维标记点位移场解析计算来估计倾斜力矩的方法相比,本文所介绍的方法提高了测量精度。虽然这两种方法都是基于对凝胶上分布的法向力的力矩贡献进行积分的原理,但是利用向量场散度进行法向力估计,以及根据力分布位置定义力矩臂都有助于提高估计效果。
•深度学习:
本文提出的结果仅仅依赖于解析计算,而没有应用深度学习,这反而可能是有利的,因为神经网络训练可能需要大量的数据才能达到令人满意的性能,而更简单的触觉表征可以在低数据区提供更好的泛化性能。当然,如果可以给定一个足够大的训练数据集,深度学习可以预期优于简单模型。
结论:
本文引入了触觉偶极矩(Tactile Dipole Moment )作为一种从视觉触觉传感器中估计倾斜力矩的技术。在两个不同的传感器模型和三个抓取的物体几何形状上测试了这种简单方法的有效性,并将其应用于接触丰富的USB插针问题。结果证明了矢量演算技术分析视触觉数据的有效性。
在未来的工作方面,可以将力矩估计方法作为感觉输入,通过自动反馈控制来解决触觉物体插入问题。
这篇关于基于电磁激励原理利用视触觉传感器估计抓取力矩的方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




