本文主要是介绍LearnOpenGL(六)之坐标系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、空间系统
1、局部空间(Local Space)
局部空间,也称物体空间,是指物体所在的坐标空间,即对象最开始所在的地方。如一个1*1px的正方形,若以它的左下角为坐标原点(0,0),则右上角坐标则为(1,1)。不管是坐标原点(0,0)还是右上角坐标(1,1),它们相对于正方形物体来说都是局部的,位于局部空间中。
2、世界空间(World Space)
世界空间,就好比一个玻璃房间,然后里面放着各种物品。若以玻璃房间的某一个角落做坐标原点,那么里面的物品也会有相对应的坐标。
在opengl中,物品可以通过模型矩阵(Model Matrix)实现将顶点坐标从局部空间变换到世界空间中。
3、观察空间(View Space)
观察空间,也被称为摄像机空间(Camera Space)或视觉空间(Eye Space),是将世界空间坐标转化为用户视野前方的坐标而产生的结果。因此观察空间就是从摄像机(人)的视角所观察到的空间。比如说,我们站在前面所说的玻璃房间前面,我们朝着玻璃房间方向所看到的空间,就是观察空间。
在opengl中,可以通过观察矩阵(View Matrix)来将顶点坐标从世界坐标变换到观察空间中。
4、裁剪空间
在一个顶点着色器运行的最后,OpenGL期望所有的坐标都能落在一个特定的范围内(-1.0, 1.0),且任何在这个范围之外的点都应该被裁剪掉(Clipped)。被裁剪掉的坐标就会被忽略,所以剩下的坐标就将变为屏幕上可见的片段。这也就是裁剪空间(Clip Space)名字的由来。
在opengl中,可以通过投影矩阵(Projection Matrix)实现将顶点坐标从观察空间变换到裁剪空间中。它指定了一个范围的坐标,比如在每个维度上的-1000到1000。投影矩阵接着会将在这个指定的范围内的坐标变换为标准化设备坐标的范围(-1.0, 1.0)。所有在范围外的坐标不会被映射到在-1.0到1.0的范围之间,所以会被裁剪掉。在上面这个投影矩阵所指定的范围内,坐标(1250, 500, 750)将是不可见的,这是由于它的x坐标超出了范围,它被转化为一个大于1.0的标准化设备坐标,所以被裁剪掉了。
5、屏幕空间
当所有顶点被变换到裁剪空间之后,便会执行透视除法(Perspective Division)。在这个过程中我们将位置向量的x,y,z分量分别除以向量的齐次w分量;透视除法是将4D裁剪空间坐标变换为3D标准化设备坐标的过程。这一步会在每一个顶点着色器运行的最后被自动执行。
在这一阶段之后,最终的坐标将会被映射到屏幕空间中(使用glViewport中的设定),并被变换成片段。
变换过程如下:

将观察坐标变换为裁剪坐标的投影矩阵可以为两种不同的形式,正射投影矩阵(Orthographic Projection Matrix)和透视投影矩阵(Perspective Projection Matrix)。
正射投影
正射投影矩阵定义了一个类似立方体的平截头箱,它定义了一个裁剪空间,在这空间之外的顶点都会被裁剪掉。创建一个正射投影矩阵需要指定可见平截头体的宽、高和长度。在使用正射投影矩阵变换至裁剪空间之后处于这个平截头体内的所有坐标将不会被裁剪掉。它的平截头体看起来像一个容器:
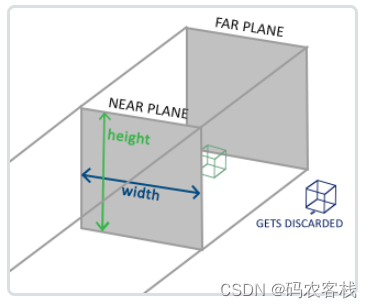
上面的平截头体定义了可见的坐标,它由由宽、高、近(Near)平面和远(Far)平面所指定。任何出现在近平面之前或远平面之后的坐标都会被裁剪掉。正射平截头体直接将平截头体内部的所有坐标映射为标准化设备坐标,因为每个向量的w分量都没有进行改变;如果w分量等于1.0,透视除法则不会改变这个坐标。
创建一个正射投影矩阵:
glm::ortho(0.0f, 800.0f, 0.0f, 600.0f, 0.1f, 100.0f);前两个参数指定了平截头体的左右坐标,第三和第四参数指定了平截头体的底部和顶部。通过这四个参数我们定义了近平面和远平面的大小,然后第五和第六个参数则定义了近平面和远平面的距离。这个投影矩阵会将处于这些x,y,z值范围内的坐标变换为标准化设备坐标。
正射投影矩阵直接将坐标映射到2D平面(平面)中。
透视投影
在实际生活中,我们可以注意到离我们越远的东西看起来更小,这便是透视效果。

在OpenGL中,可以通过透视投影矩阵实现该效果。这个投影矩阵将给定的平截头体范围映射到裁剪空间,除此之外还修改了每个顶点坐标的w值,从而使得离观察者越远的顶点坐标w分量越大。被变换到裁剪空间的坐标都会在-w到w的范围之间(任何大于这个范围的坐标都会被裁剪掉)。OpenGL要求所有可见的坐标都落在-1.0到1.0范围内,作为顶点着色器最后的输出,因此,一旦坐标在裁剪空间内之后,透视除法就会被应用到裁剪空间坐标上:
顶点坐标的每个分量都会除以它的w分量,距离观察者越远顶点坐标就会越小。这是也是w分量非常重要的另一个原因,它能够帮助我们进行透视投影。最后的结果坐标就是处于标准化设备空间中的。
创建透视投影矩阵:
glm::mat4 proj = glm::perspective(glm::radians(45.0f), (float)width/(float)height, 0.1f, 100.0f);glm::perspective所做的其实就是创建了一个定义了可视空间的大平截头体,任何在这个平截头体以外的东西最后都不会出现在裁剪空间体积内,并且将会受到裁剪。一个透视平截头体可以被看作一个不均匀形状的箱子,在这个箱子内部的每个坐标都会被映射到裁剪空间上的一个点。下面是一张透视平截头体的图片:
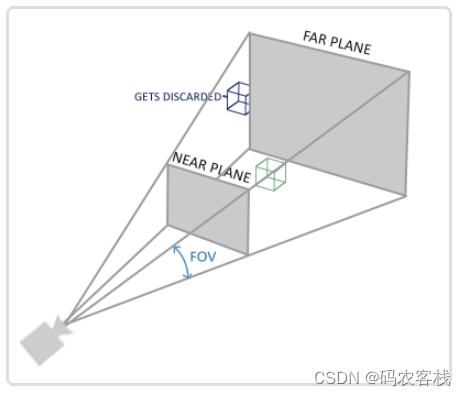
它的第一个参数定义了fov的值,它表示的是视野(Field of View),并且设置了观察空间的大小。如果想要一个真实的观察效果,它的值通常设置为45.0f,第二个参数设置了宽高比,由视口的宽除以高所得。第三和第四个参数设置了平截头体的近和远平面。我们通常设置近距离为0.1f,而远距离设为100.0f。所有在近平面和远平面内且处于平截头体内的顶点都会被渲染。
总结
一个顶点坐标被变换到裁剪坐标的过程:
glm::mat4 model;
model = glm::rotate(model, glm::radians(-55.0f), glm::vec3(1.0f, 0.0f, 0.0f));注意矩阵运算的顺序是相反的(记住我们需要从右往左阅读矩阵的乘法)。最后的顶点应该被赋值到顶点着色器中的gl_Position,OpenGL将会自动进行透视除法和裁剪。
二、3D编程
1、创建模型矩阵(Model Matrix)
glm::mat4 model;
model = glm::rotate(model, glm::radians(-55.0f), glm::vec3(1.0f, 0.0f, 0.0f));2、创建观察矩阵(Projection Matrix)
glm::mat4 view;
// 注意,我们将矩阵向我们要进行移动场景的反方向移动。
view = glm::translate(view, glm::vec3(0.0f, 0.0f, -3.0f));3、创建投影矩阵(Projection Matrix)
glm::mat4 projection;
projection = glm::perspective(glm::radians(45.0f), screenWidth / screenHeight, 0.1f, 100.0f);4、修改顶点着色器
#version 330 core
layout (location = 0) in vec3 aPos;
...
uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;void main()
{// 注意乘法要从右向左读gl_Position = projection * view * model * vec4(aPos, 1.0);...
}5、将矩阵传入着色器
int modelLoc = glGetUniformLocation(ourShader.ID, "model");
glUniformMatrix4fv(modelLoc, 1, GL_FALSE, glm::value_ptr(model));
... // 观察矩阵和投影矩阵与之类似三、Z缓冲
OpenGL存储它的所有深度信息于一个Z缓冲(Z-buffer)中,也被称为深度缓冲(Depth Buffer)。GLFW会自动为你生成这样一个缓冲(就像它也有一个颜色缓冲来存储输出图像的颜色)。深度值存储在每个片段里面(作为片段的z值),当片段想要输出它的颜色时,OpenGL会将它的深度值和z缓冲进行比较,如果当前的片段在其它片段之后,它将会被丢弃,否则将会覆盖。这个过程称为深度测试(Depth Testing),它是由OpenGL自动完成的。
启用深度测试:
glEnable(GL_DEPTH_TEST);清除深度缓冲:
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);四、测试效果
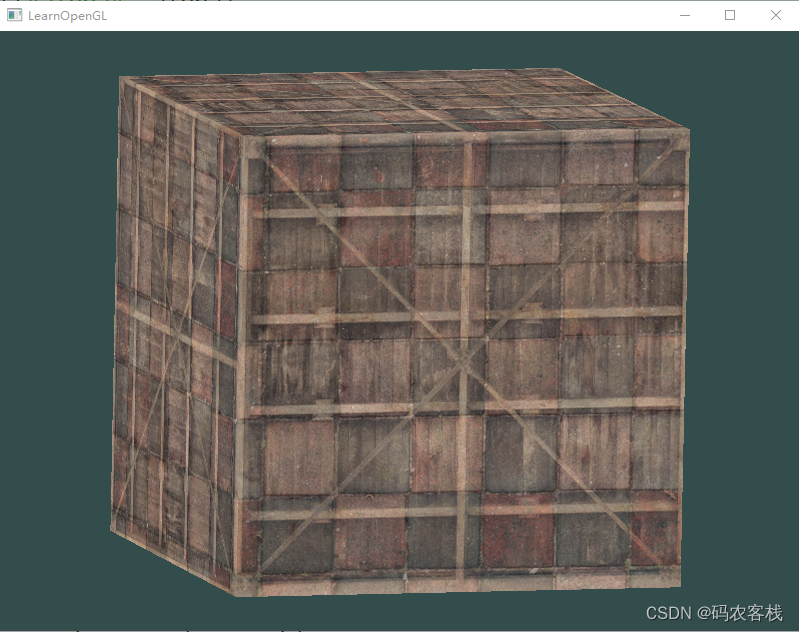
五、demo下载
点击下载
觉得有帮助的话,打赏一下呗。。


这篇关于LearnOpenGL(六)之坐标系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






