本文主要是介绍制作一个RISC-V的操作系统十四-任务同步和锁,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 并发与同步
- 临界区和锁
- 锁
- 死锁
- 解决死锁
- 自旋锁(spin lock)
- 原子性问题
- 原子操作实现
- amoswap.w.aq
- 例子
- 另一种方法
- 自旋锁的注意事项
- 代码
- 其他同步技术
并发与同步
控制流:可理解为任务或进程
中断也可以理解为一个切换到另一个任务(中断处理程序),于是宏观上认为同时执行了
同步:可以理解要求某个任务的某个操作与某个任务的某个操作的先后顺序有要求
临界区和锁
并发执行中,当一个进程访问临界区时,除非访问结束,否则其他进程(即使切换到了该进程)不能进入临界区即阻塞。不然影响该进程对临界区资源的使用。
临界区是指在多线程环境中,同一时刻只允许一个线程访问的一段代码或资源区域。为了确保临界区的安全访问,避免因多个线程同时访问导致的数据不一致或其他竞态条件,我们需要采取同步措施来保护临界区
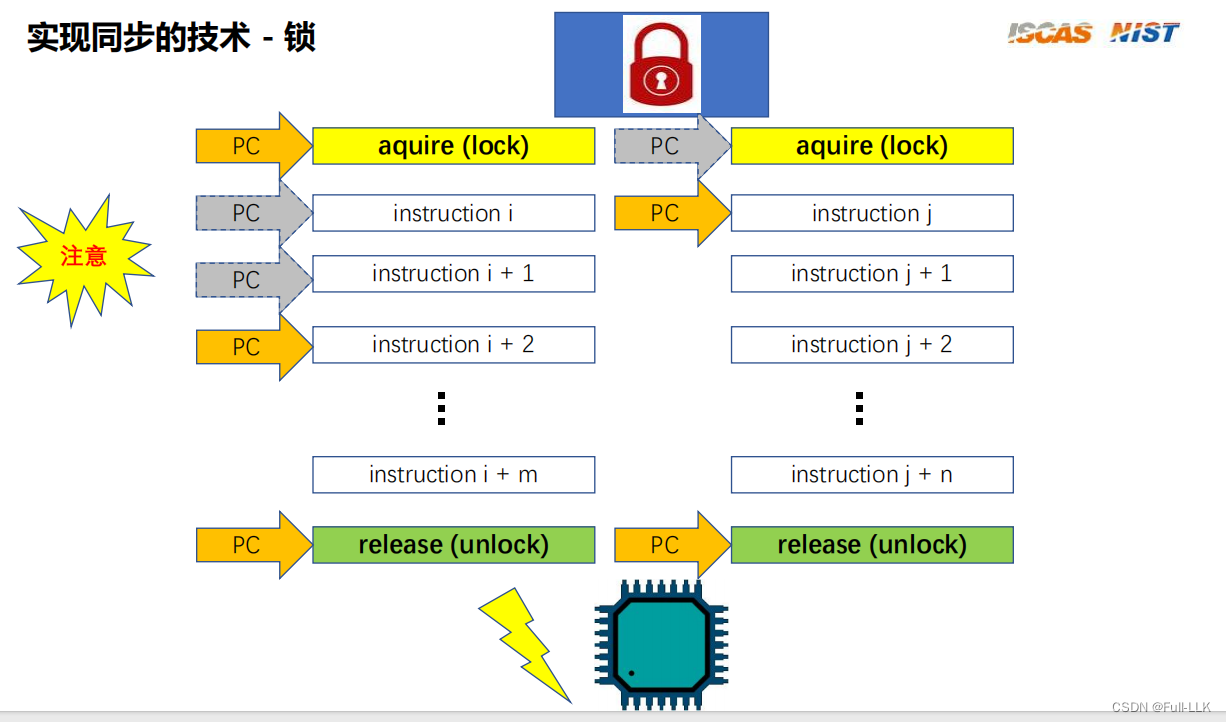
锁
- 当线程尝试获取一个已被其他线程持有的可睡眠锁时,如果锁不可用,该线程会被操作系统挂起,并放入等待队列中,从而停止执行(进入睡眠状态)。一旦持有锁的线程释放了锁,操作系统会选择合适的线程将其唤醒并赋予其锁的所有权。这样,线程就可以继续执行被保护的代码段。
- 不可睡眠锁在尝试获取锁时,如果锁被占用,当前线程并不会被挂起,而是会在原地循环等待(自旋),不断检查锁是否已经释放。这种方式避免了线程上下文切换的开销,但可能会导致线程消耗大量的CPU资源,尤其是当锁被持有时间较长时。
上锁导致另一个进程也要上锁时阻塞然后一直循坏,。直到最后解锁
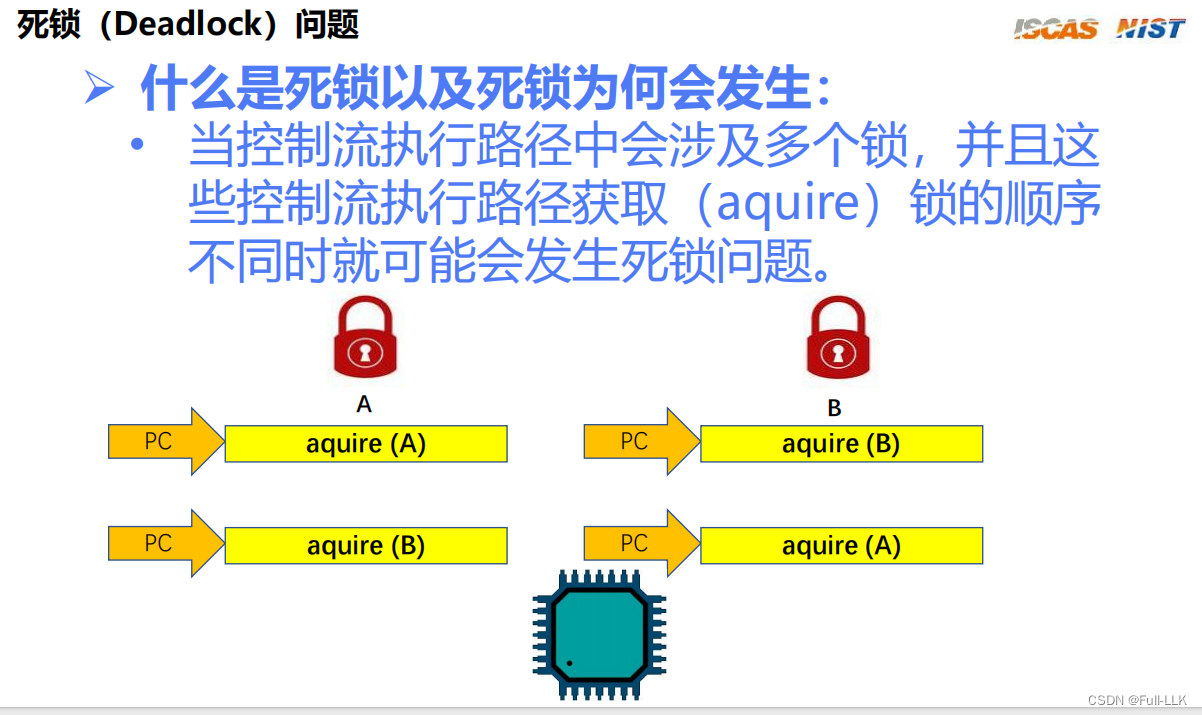
死锁
访问多个临界区可能就需要涉及多个锁
当按照A执行获取A锁,然后B执行获取B锁,A再获取B锁,B再获取A锁
这样将导致阻塞。即再切换到A准备获取B锁,然后再切换到B获取A锁会阻塞。二者都卡住
解决死锁
除了三点之外还可以实现申请多个锁一次性申请,不中断。可以解决
调整获取锁的顺序,因为上个例子中申请锁的顺序不一致也是导致死锁的原因
防止在持有一把锁再申请其他锁就是尽量保存申请一把锁之前申请的锁都释放掉
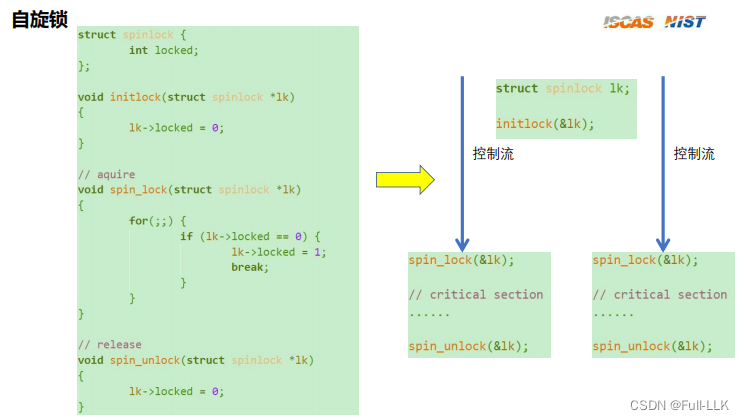
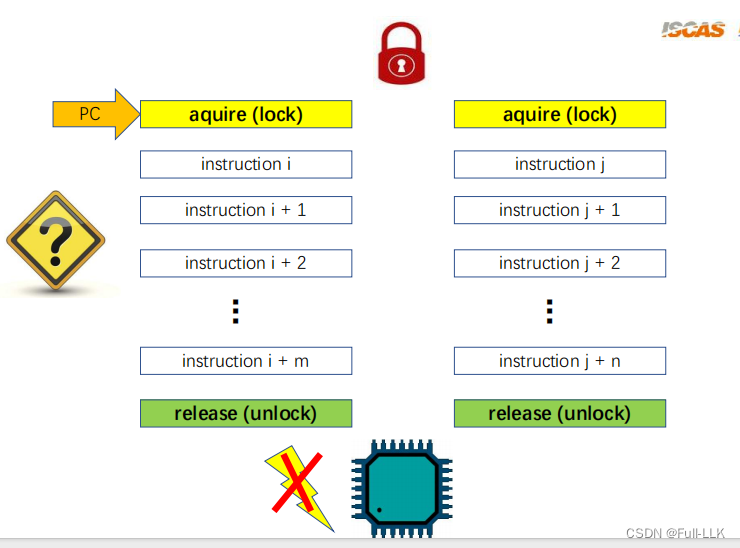
自旋锁(spin lock)
- 初始话锁
- 在不同控制流访问临界区的前后执行上锁和解锁
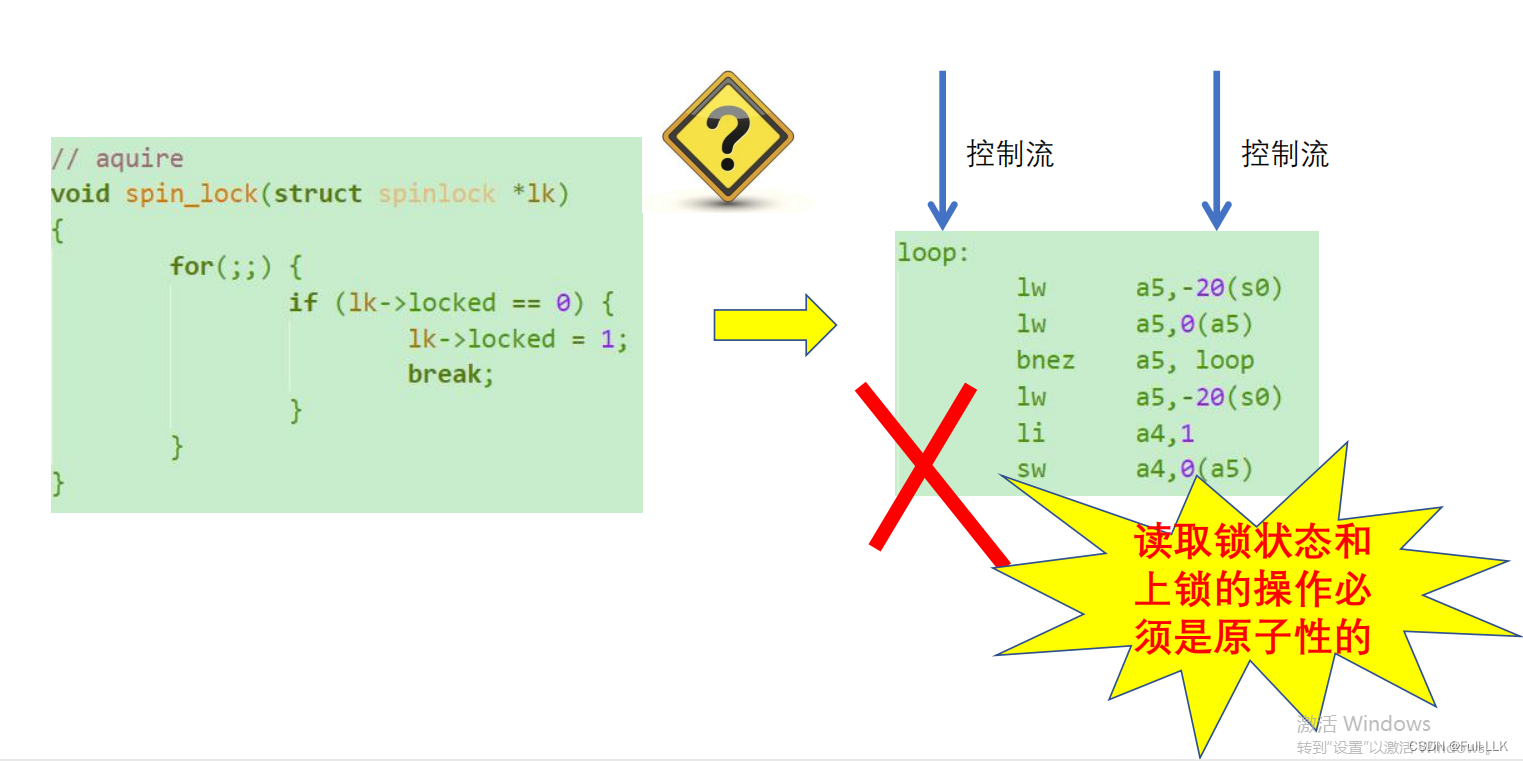
原子性问题
中断的级别是针对到汇编指令级别的
也就是说上锁操作可能还没完成就中断然后跳转到另一个控制流导致另一个控制流此时发现锁没有被锁上,导致两个都进入临界区(第一个汇编执行进入了if但没有设置locked导致第二个此时也能进入if并上锁)
原子操作实现
amoswap.w.aq 将locked值存到寄存器,同时locked的值更新为寄存器的值即为1。不会被打断
这里把值的变化给一气呵成完成了,使得不会出现锁没来得及更新就切换到另一个进程使得其也认为没上锁。(也可以认为让值的更新在判断是否进入临界区之前)
如果不是原子性的,那么假设分为几部分实现更新值和保存原来值的作用,那么可能会得到死锁或者同时进入临界区的结果
发现在只有执行这条指令的执行流会上锁,其他都不会,哪怕是快接触到该指令的执行流
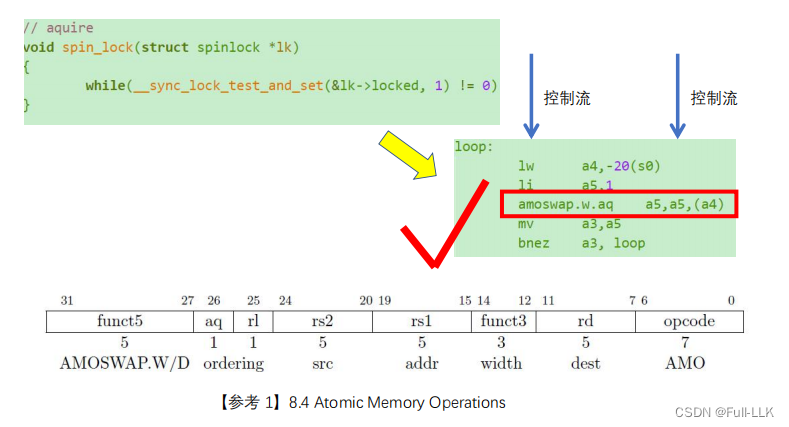
amoswap.w.aq
在RISC-V架构中,amoswap.w.aq指令是原子内存操作指令之一,主要用于并发环境下的原子读改写内存操作。这个指令的名字来源于几个关键词的组合:
- amo: AtomiC Memory Operation,原子内存操作,表明这条指令在执行过程中是不可分割的,即使在多线程或多处理器环境下也能确保操作的原子性。
- swap: 表示该指令执行的是交换操作,即将寄存器中的值与内存位置的内容进行交换。
- w: 表示操作的数据宽度是32位(word大小)。
- aq: 是Atomicity Qualifier(原子性限定符)的一部分,RISC-V架构中使用aq和rl两个原子性顺序标签来配合实现内存排序模型。其中,aq(Acquire)确保了指令的执行不会与之前的内存操作重排,并且在指令执行后能够观察到对其他核心的写入操作。
amoswap.w.aq指令的具体功能是这样的:
- 它同时读取内存位置(通过指定的地址)的原始值,并将寄存器中的值写入该内存位置。
- 最终,指令会将读取到的原始内存值存储到另一个指定的寄存器中。
这一系列操作作为一个单一的原子步骤完成,这对于维护数据一致性至关重要,特别是在多线程并发访问共享内存区域时。
例如,amoswap.w.aq rs2, rs1, (ra) 指令格式中:
- rs1 是要写入内存的新值的源寄存器。
- rs2 是保存内存原值的目标寄存器。
- ra 是包含要操作的内存地址的寄存器。
-
aq(Acquire):
- 当一个带有"aq"标签的指令被执行时,它起到“获取”内存屏障的作用,确保该指令在其之前的内存读写操作都已完成,并且这些操作对于后续的操作(包括本核和其他核)都是可见的。
- 即,amoswap.w.aq指令不仅本身是原子性的,而且还能保证在执行该指令之后,任何对共享变量的读取操作都能够看到指令之前发生的所有写入操作的效果,有效地阻止了指令重排序。
-
rl(Release):
- 相对应的,带有"rl"标签的指令意味着它是一个“释放”内存屏障,确保该指令执行时,它及其之前的所有内存操作全部完成,并且在这条指令之后的写入操作对其他核将是不可见的,直到下一个带有"aq"标签的指令执行。
- 也就是说,amoswap.w.rl指令在写入共享内存后,其他核心只有在执行了自身的"aq"指令后才能看到这次写入的结果。
例子
假设存在两个核心Core A和Core B,它们共享一块内存区域,并且Core A正在修改某个变量shared_var,而Core B需要读取shared_var的最新值。如果不加控制,可能出现以下情况:
- Core A首先修改了
shared_var的值,但由于缓存一致性等因素,这个修改还没有刷新到主内存; - Core B此时去读取
shared_var,由于没有内存排序保障,可能会读取到旧值而非Core A刚修改的新值。
为了保证Core B能看到Core A的写入操作,我们可以使用带有aq标签的原子指令。例如,在RISC-V架构中,如果我们有一个amoswap.w.aq指令:
amoswap.w.aq t1, t2, (a0)
这条指令会将寄存器t2的值原子性地写入地址a0指向的内存位置,并且返回原来内存位置的值到t1。更重要的是,这里的aq标识确保了在执行此原子操作之前,所有内存操作都已经完成并且对外部核心可见,也就是说Core B在执行amoswap.w.aq指令之前,一定能观察到Core A对该共享内存的先前写入。
另一种方法
上锁可以理解为直接关掉中断,使得只有对应进程上锁后,逻辑就无法被切换,进而一直执行该执行流
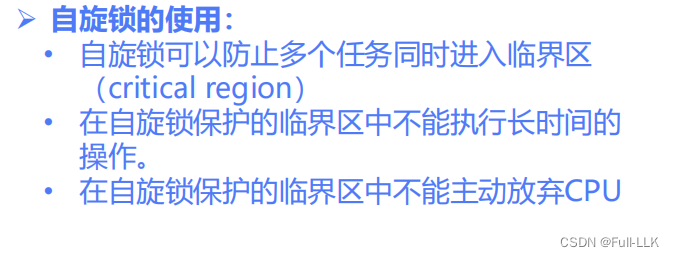
自旋锁的注意事项
上锁需要是原子性操作
不能执行长时间,不然使得其他进程占用CPU大量时间但啥事没做
不能主动放弃CPU不然没有解锁,其他进程永远无法访问临界区
代码
https://github.com/FULLK/risllkos/tree/main/Fullkenerl9
其他同步技术
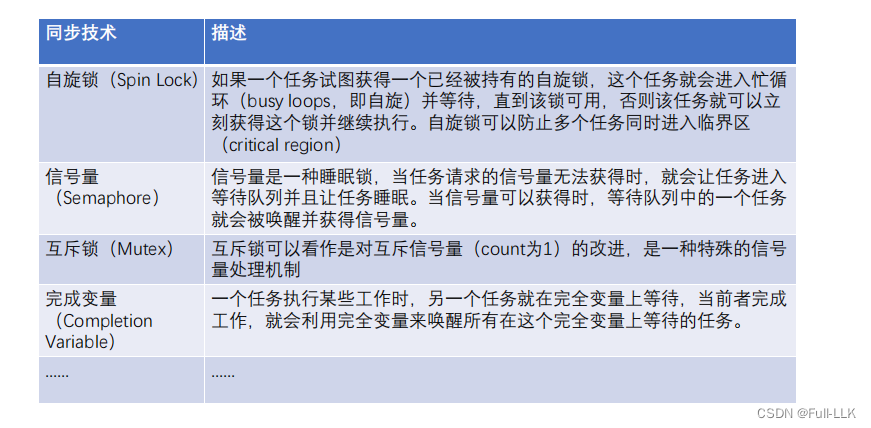
在操作系统和多线程编程中,完成变量(Completion Variable)是一种同步原语,主要用于实现线程或进程间的同步,尤其是在一个任务完成特定工作后通知另一个任务的场景。其核心作用在于简化并发环境下的协作流程。
具体来说,完成变量的主要作用包括:
-
任务标记:一个任务在完成某项操作后,它可以设置(或增加计数)一个完成变量,表明某个关键阶段已经结束。
-
阻塞与唤醒:其他任务可以在等待这个完成变量,当它们检测到变量被设置或等待计数达到预期值时,会被自动唤醒并恢复执行。这样,一个任务可以在开始执行下一个阶段之前,安全地等待前一个任务完成其工作。
-
替代信号量:在某些情况下,完成变量可以作为信号量的轻量级替代品,特别是在只需要一次性通知而不是多次信号控制的情况下。相比于传统的信号量,完成变量通常更易于理解和使用,因为它们直接关联到一个特定的操作完成与否。
例如,在Linux内核中,完成变量 (completion) 是一种内建的数据结构和API,它允许内核线程或其他并发实体之间进行同步。一个典型的使用场景是,当一个内核线程发起I/O操作后,可以挂起自己并在完成变量上等待,直到I/O完成,设备驱动或者其他相关部分会触发这个完成变量以唤醒等待的线程。
这篇关于制作一个RISC-V的操作系统十四-任务同步和锁的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





