本文主要是介绍ROS 2边学边练(30)-- 使用事件句柄,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
ROS 2中的Launch是一个执行和管理用户定义流程的系统。它负责监控其启动的流程的状态,并报告这些流程的状态变化并作出反应。这些变化被称为事件,可以通过向启动系统注册事件处理程序来处理。可以为特定事件注册事件处理程序,并可用于监视进程的状态。此外,它们还可用于定义一组复杂的规则,这些规则可用于动态修改启动文件。
动动手
我们还是继续在之前的launch_tutorial包中进行。
编写事件句柄launch文件
在launch文件夹中新建example_event_handlers_launch.py,复制以下内容:
from launch_ros.actions import Nodefrom launch import LaunchDescription
from launch.actions import (DeclareLaunchArgument, EmitEvent, ExecuteProcess,LogInfo, RegisterEventHandler, TimerAction)
from launch.conditions import IfCondition
from launch.event_handlers import (OnExecutionComplete, OnProcessExit,OnProcessIO, OnProcessStart, OnShutdown)
from launch.events import Shutdown
from launch.substitutions import (EnvironmentVariable, FindExecutable,LaunchConfiguration, LocalSubstitution,PythonExpression)def generate_launch_description():turtlesim_ns = LaunchConfiguration('turtlesim_ns')use_provided_red = LaunchConfiguration('use_provided_red')new_background_r = LaunchConfiguration('new_background_r')turtlesim_ns_launch_arg = DeclareLaunchArgument('turtlesim_ns',default_value='turtlesim1')use_provided_red_launch_arg = DeclareLaunchArgument('use_provided_red',default_value='False')new_background_r_launch_arg = DeclareLaunchArgument('new_background_r',default_value='200')turtlesim_node = Node(package='turtlesim',namespace=turtlesim_ns,executable='turtlesim_node',name='sim')spawn_turtle = ExecuteProcess(cmd=[[FindExecutable(name='ros2'),' service call ',turtlesim_ns,'/spawn ','turtlesim/srv/Spawn ','"{x: 2, y: 2, theta: 0.2}"']],shell=True)change_background_r = ExecuteProcess(cmd=[[FindExecutable(name='ros2'),' param set ',turtlesim_ns,'/sim background_r ','120']],shell=True)change_background_r_conditioned = ExecuteProcess(condition=IfCondition(PythonExpression([new_background_r,' == 200',' and ',use_provided_red])),cmd=[[FindExecutable(name='ros2'),' param set ',turtlesim_ns,'/sim background_r ',new_background_r]],shell=True)return LaunchDescription([turtlesim_ns_launch_arg,use_provided_red_launch_arg,new_background_r_launch_arg,turtlesim_node,RegisterEventHandler(OnProcessStart(target_action=turtlesim_node,on_start=[LogInfo(msg='Turtlesim started, spawning turtle'),spawn_turtle])),RegisterEventHandler(OnProcessIO(target_action=spawn_turtle,on_stdout=lambda event: LogInfo(msg='Spawn request says "{}"'.format(event.text.decode().strip())))),RegisterEventHandler(OnExecutionComplete(target_action=spawn_turtle,on_completion=[LogInfo(msg='Spawn finished'),change_background_r,TimerAction(period=2.0,actions=[change_background_r_conditioned],)])),RegisterEventHandler(OnProcessExit(target_action=turtlesim_node,on_exit=[LogInfo(msg=(EnvironmentVariable(name='USER'),' closed the turtlesim window')),EmitEvent(event=Shutdown(reason='Window closed'))])),RegisterEventHandler(OnShutdown(on_shutdown=[LogInfo(msg=['Launch was asked to shutdown: ',LocalSubstitution('event.reason')])])),])稍微说明。
RegisterEventHandler(OnProcessStart(target_action=turtlesim_node,on_start=[LogInfo(msg='Turtlesim started, spawning turtle'),spawn_turtle])
), RegisterEventHandler为事件句柄的注册函数,大家从上面那个完整的launch文件里应该也看到了,一共注册了 OnProcessStart, OnProcessIO, OnExecutionComplete, OnProcessExit, 和OnShutdown 这五个事件句柄。
OnProcessStart事件处理程序用于注册在turtlesim节点启动时执行的回调函数。它将消息输出到控制台,并在turtlesim节点启动时执行spawn_turtle操作。
RegisterEventHandler(OnProcessIO(target_action=spawn_turtle,on_stdout=lambda event: LogInfo(msg='Spawn request says "{}"'.format(event.text.decode().strip())))
),OnProcessIO事件处理程序用于注册回调函数,该函数在spawn_turtle操作写入其标准输出时执行。它记录生成请求的结果。
RegisterEventHandler(OnExecutionComplete(target_action=spawn_turtle,on_completion=[LogInfo(msg='Spawn finished'),change_background_r,TimerAction(period=2.0,actions=[change_background_r_conditioned],)])
),OnExecutionComplete事件处理程序用于注册在spawn_turtle操作完成时执行的回调函数。它将一条消息输出到控制台,并在派生操作完成时执行change_background_r和change_background_r_conditioned操作。
RegisterEventHandler(OnProcessExit(target_action=turtlesim_node,on_exit=[LogInfo(msg=(EnvironmentVariable(name='USER'),' closed the turtlesim window')),EmitEvent(event=Shutdown(reason='Window closed'))])
),OnProcessExit事件处理程序用于注册在turtlesim节点退出时执行的回调函数。它将消息输出到控制台,并在turtlesim节点退出时执行EmitEvent操作以发出Shutdown事件。这意味着当turtlesim窗口关闭时,启动过程将关闭。
RegisterEventHandler(OnShutdown(on_shutdown=[LogInfo(msg=['Launch was asked to shutdown: ',LocalSubstitution('event.reason')])])
),最后,OnShutdown事件处理程序用于注册回调函数,该函数在启动文件被要求关闭时执行。它会向控制台输出一条消息,说明为什么要求关闭启动文件。它记录带有关闭原因的消息,如关闭turtlesim窗口或用户发出的ctrl-c信号。
构建功能包
我们回到launch_ws工作空间根路径下进行构建:
$colcon build运行launch
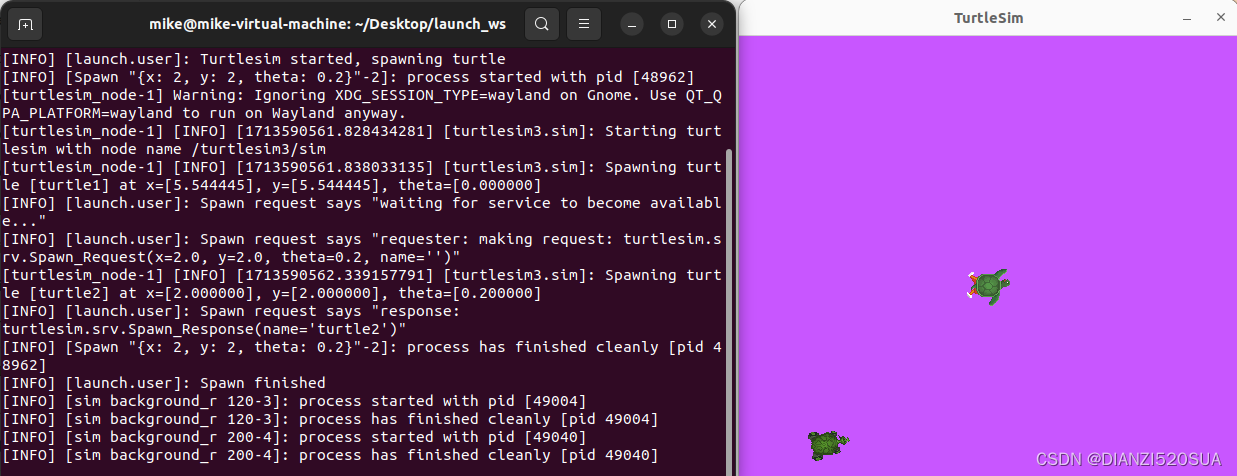
$ros2 launch launch_tutorial example_event_handlers_launch.py turtlesim_ns:='turtlesim3' use_provided_red:='True' new_background_r:=200这个过程会有下面几个部分组成:
- 启动一个turtlesim节点(背景颜色为蓝色);
- 孵化第二个小海龟;
- 改变背景颜色为紫色;
- 2秒后改变背景颜色为粉色(如果其提供的background_r参数值为200且use_provided_red参数值为True);
- 当小海龟窗口关闭的时候关掉launch文件;
另外当发生以下的任何一种情况时控制台会输出log消息:
- turtlesim节点启动时;
- 孵化动作被执行时;
- change_background_r动作被执行时;
- change_background_r_conditioned动作被执行时;
- turtlesim节点退出时;
- launch进程被请求要关闭时;
运行之前记得source install/setup.bash,运行最终结果如下:
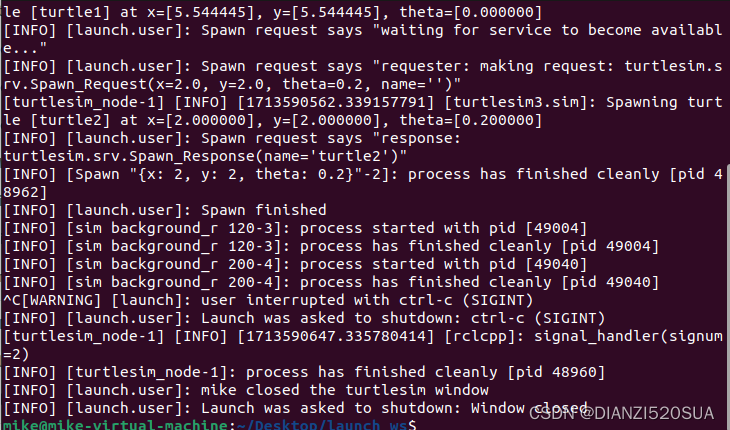
当我们ctrl-c关闭时,返回如下:
文档资料
官方文档有提供更为详细的可用的事件句柄信息。
本篇完。
这篇关于ROS 2边学边练(30)-- 使用事件句柄的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




