本文主要是介绍使用docker配置CCM-SLAM,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一.Docker环境配置
1.拉取Docker镜像
sudo docker pull ubuntu:18.04
拉取的为ununtu18版本镜像,环境十分干净,可以通过以下命令查看容器列表
sudo docker images
如果想删除多余的docker image,可以使用指令
sudo docker rmi -f <id>2.创建容器
sudo docker run -it --privileged -v /home/pc/docker/ccm:/home/pc/docker/ccm --name=ccmslam --net=host --env="DISPLAY" --volume="$HOME/.Xauthority:/root/.Xauthority:rw" ubuntu:18.04 /bin/bash
基于ubuntu18.04建立容器,并开启GUI功能。
进入容器后,会在root命令下,到此我们便得到了一个纯净的ubuntu环境。
可以使用sudo docker ps查看正在运行的容器,sudo docker ps -a查看所有容器
当我想要退出时,输入exit退出容器,然后使用sudo docker stop ccmslam来停止容器,当我想再次进入容器时,使用sudo docker start ccmslam启动容器,再使用sudo docker exec -it cmslam bash进入容器
二.环境配置
1.安装ROS
安装ROS
首先更新软件源
apt-get update
apt-get upgrade设置清华源
sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置最新的密钥
apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
出现报错,是因为docker下的容器环境太干净

因此需要先安装
apt-get install -y gnupg2
之后重新导入密钥,成功

安装
apt-get install
apt-get install ros-melodic-desktop-full
apt-get install ros-melodic-rqt*安装完成之后已经安装好了opencv
查看当前opencv版本
pkg-config --modversion opencv
接下来进行ROS系统环境的配置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
这样就完成了配置,运行roscore发现ROS可以正常启动
roscore
rosdep初始化
apt-get install python-pip
pip install rosdepc
rosdepc init
rosdepc update
2.安装CCM-SLAM
源码地址:https://github.com/VIS4ROB-lab/ccm_slam
安装依赖项
apt-get install python3-catkin-tools创建工作空间:
mkdir -p ~/ccmslam_ws/src
cd ~/ccmslam_ws
source /opt/ros/melodic/setup.bash
catkin init
catkin config --extend /opt/ros/melodic克隆CCM-SLAM:
cd ~/ccmslam_ws/src
git clone https://github.com/VIS4ROB-lab/ccm_slam.git编译DBoW2:
cd /home/pc/docker/ccm/ccmslam_ws/src/ccm_slam-master/cslam/thirdparty/DBoW2
mkdir build
cd build
cmake ..
make -j8编译g2o:
cd ../../g2o/
mkdir build
cd build
cmake --cmake-args -DG2O_U14=0 ..
make -j8解压Vocabulary:
cd ../../../conf/
unzip ORBvoc.txt.zipCCM-SLAM只在ROS Kinetic with OpenCV 3和ROS Indigo with OpenCV 2测试过,CMakeLists.txt文件也是只有这两个分支。先链接ROS Melodic:
参考:https://github.com/VIS4ROB-lab/ccm_slam/issues/19
Ubuntu 18.04下编译之前需要修改文件:~/ccmslam_ws/src/ccm_slam/cslam/CMakeLists.txt
apt-get install vim
vi ../CMakeLists.txt将16行的
else()改为:
elseif($ENV{ROS_DISTRO} MATCHES "melodic")保存退出。
编译CCM-SLAM
cd /home/pc/docker/ccm/ccmslam_ws
catkin build ccmslam -j4 --cmake-args -DG2O_U14=0 -DCMAKE_BUILD_TYPE=Release
vi ~/.bashrc
source /home/pc/docker/ccm/ccmslam/devel/setup.bash
source ~/.bashrc
3.测试CCM-SLAM
使用数据集测试:
到https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets 下载EuRoC machine hall rosbag 数据
分别为MH_01_easy.bag, MH_02_easy.bag,MH_03_medium.bag,MH_04difficult.bag
用terminator开多个窗口(没有可以先安装,apt-get install terminator)
启动服务器:
roslaunch ccmslam Server.launch 启动客户端0:(启动客户端的数目根据自己CPU的算力决定)
roslaunch ccmslam Client0_euroc.launch
rosbag play MH_01_easy.bag --start 45
启动客户端1:(启动客户端的数目根据自己CPU的算力决定)
roslaunch ccmslam Client1_euroc.launch
rosbag play MH_02_easy.bag --start 35 /cam0/image_raw:=/cam0/image_raw1
启动客户端2:(启动客户端的数目根据自己CPU的算力决定)
roslaunch ccmslam Client2_euroc.launch
rosbag play MH_03_medium.bag --start 15 /cam0/image_raw:=/cam0/image_raw2
启动客户端3:(启动客户端的数目根据自己CPU的算力决定)
roslaunch ccmslam Client0_euroc.launch
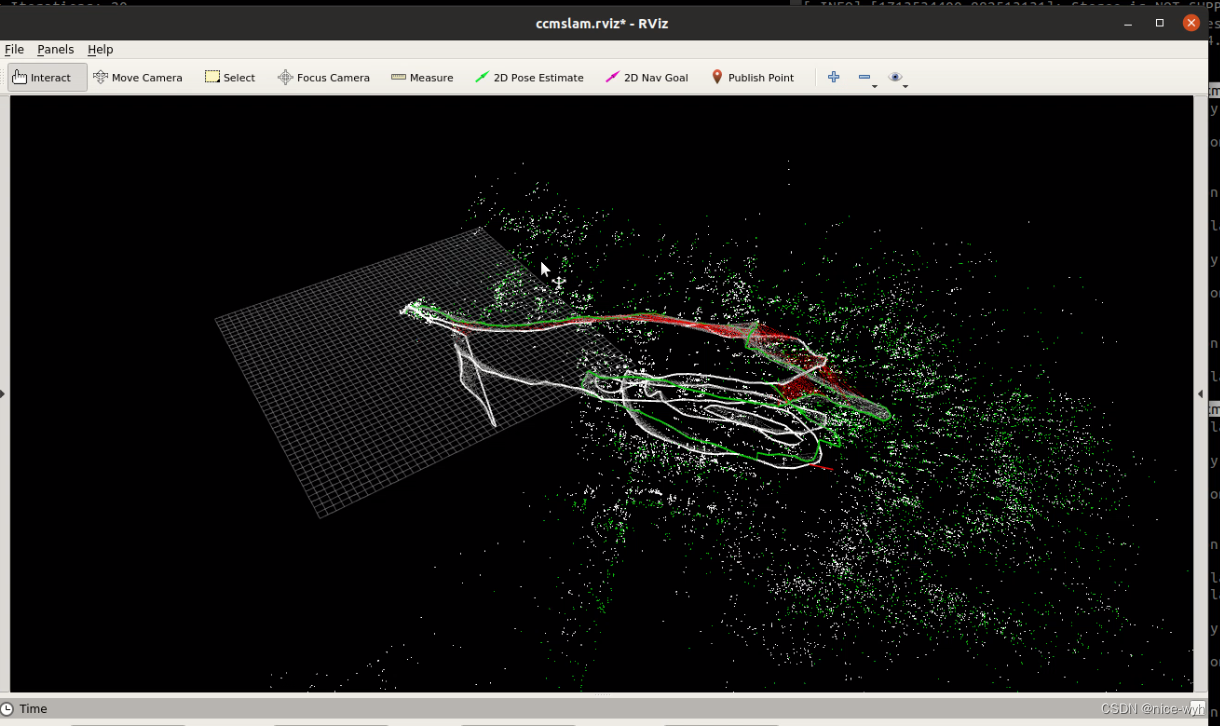
rosbag play MH_04difficult.bag --start 15 /cam0/image_raw:/cam0/image_raw3启动可视化rviz:
rviz -d conf/rviz/ccmslam.rviz这里我开了两个客户端进行测试
这篇关于使用docker配置CCM-SLAM的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





