本文主要是介绍Anritsu MS9740B与MS9740A 光谱分析仪 的区别?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
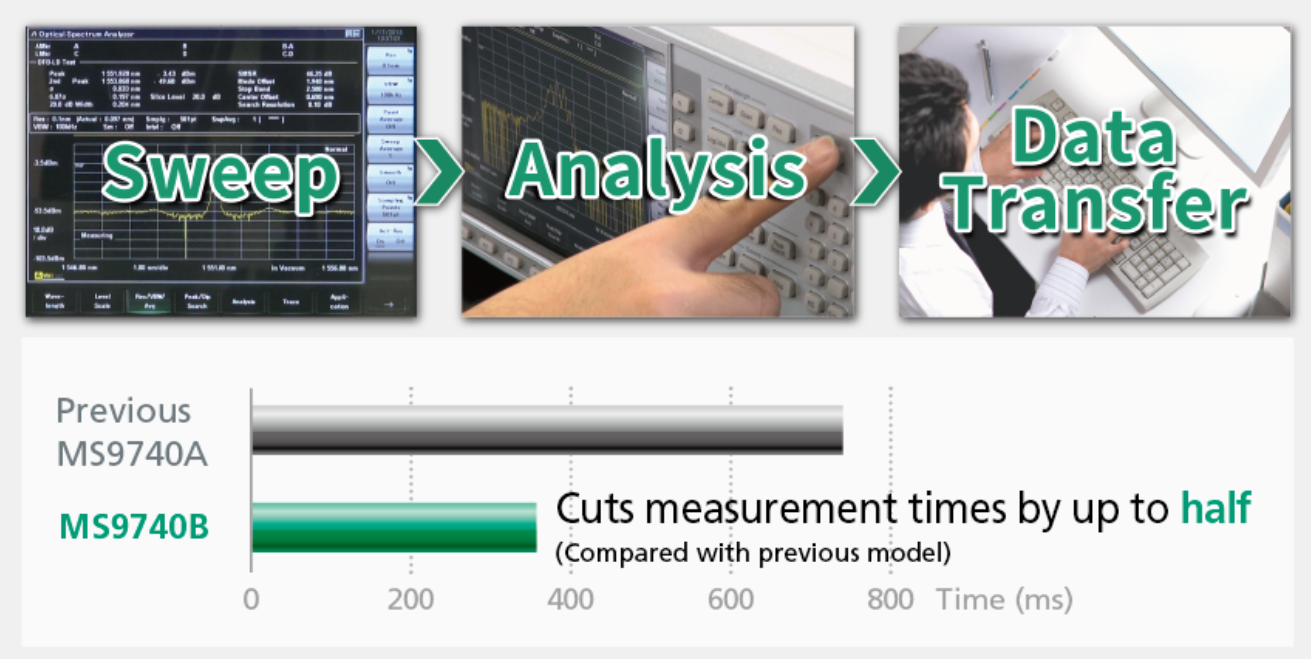
MS9740B与MS9740A的主要区别在于测量处理时间的缩短和对高速信号处理技术的应用。MS9740B在保持原有功能和性能的同时,将测量处理时间缩短了一半。这一点通过提高生产效率和减少测量及检查时间来实现,从而提高了光有源设备制造商的生产力。此外,MS9740B采用了先进的光学设计和高速信号处理技术,能够在宽广的波长范围内进行快速且准确的光谱分析。这包括从波形扫描到波形解析以及向外部控制设备的数据传送,实现了最短0.2秒以下的整体测试速度。
尽管两者都支持多模光纤输入,并且波长范围均为600 nm到1750 nm,适合于850 nm频段VCSEL制造和评估,但MS9740B在处理速度和测量灵敏度方面进行了优化,克服了处理速度加快导致的测量灵敏度下降的问题。此外,MS9740B还具有更宽的动态范围和更高的分辨率,并且支持简化的分析过程。
总结来说,MS9740B相比于MS9740A,在测量处理时间、信号处理技术、动态范围、分辨率以及整体测试速度方面都有所改进和提升。这些改进使得MS9740B更适合于需要高效率检查的有源光学设备的制造和评估。

MS9740B与MS9740A在光学设计方面的具体差异是什么?
MS9740B与MS9740A在光学设计方面的具体差异主要体现在以下几个方面:
-
测量处理时间的缩短:MS9740B在保持与前代产品MS9740A相同的测量灵敏度性能、功能和尺寸的同时,通过优化光谱分析仪MS9740B的光学接收器带宽设置,将测量处理时间缩短了50%。2. 内置激光的最大输出功率:虽然文献中没有直接提到MS9740A的具体参数,但从MS9740B的描述中可以看出,MS9740B具有内置激光,并且列出了最大输出功率(mW)、脉冲宽度(s)/重复率以及发射波长(nm)。这表明MS9740B在光学设计上可能采用了不同的技术或材料来实现更高的输出功率和更宽的波长范围,以满足不同应用场景的需求。
-
高性能光学分辨率和高速测量:MS9740A被描述为提供高性能光学分辨率和高速测量,能够满足设备和组件制造商的需求。波形数据可以在0.2秒内测量并传输到外部控制设备,比以前的Anritsu型号提高了5倍的速度。虽然这一描述直接关联的是MS9740A,但它也间接反映了MS9740系列产品的设计理念,即追求高性能和高速度。结合MS9740B在测量处理时间上的改进,可以推测MS9740B在光学设计上同样注重提高性能和效率。
MS9740B与MS9740A在光学设计方面的具体差异主要体现在对测量处理时间的优化、内置激光的最大输出功率以及对高性能光学分辨率和高速测量的持续追求上。这些差异使得MS9740B在保持与MS9740A相似的功能和尺寸的基础上,能够提供更高的生产效率和更广泛的使用场景。
MS9740B的高速信号处理技术具体包括哪些技术或方法?
MS9740B的高速信号处理技术具体包括以下技术和方法:
-
宽动态范围:MS9740B的动态范围达到了80 dB(1 nm 带宽),这使得它能够清晰地观察到信号噪声比(SNR)高的光谱。
-
信号电平积分功能:支持调制信号的信号电平积分功能,这有助于在分析过程中更准确地估计噪声位置。
-
噪声拟合函数:可以使用噪声拟合函数来准确估计噪声位置,这对于提高测量精度非常关键。
-
光轴对准、波长校准和有效分辨率校准功能:这些功能确保了测量的准确性和可靠性,特别是在处理高速信号时。
-
高分解能和高速掃描:MS9740B实现了高分解能和高速掃描,这对于捕捉快速变化的信号非常重要。
-
多模式光纤输入:支持多模式光纤输入,特别是对于850 nm带的VCSEL的制造和评估非常理想,这表明了其在处理不同类型的高速信号方面的灵活性。
MS9740B的高速信号处理技术涵盖了从宽动态范围、信号电平积分、噪声拟合函数到光轴对准、波长校准、有效分辨率校准以及高分解能和高速掃描等多个方面,这些技术和方法共同确保了其在高速信号处理领域的高效性和准确性。
如何量化MS9740B在动态范围和分辨率方面的改进?
MS9740B光谱分析仪在动态范围和分辨率方面的改进可以通过以下几个方面进行量化:
-
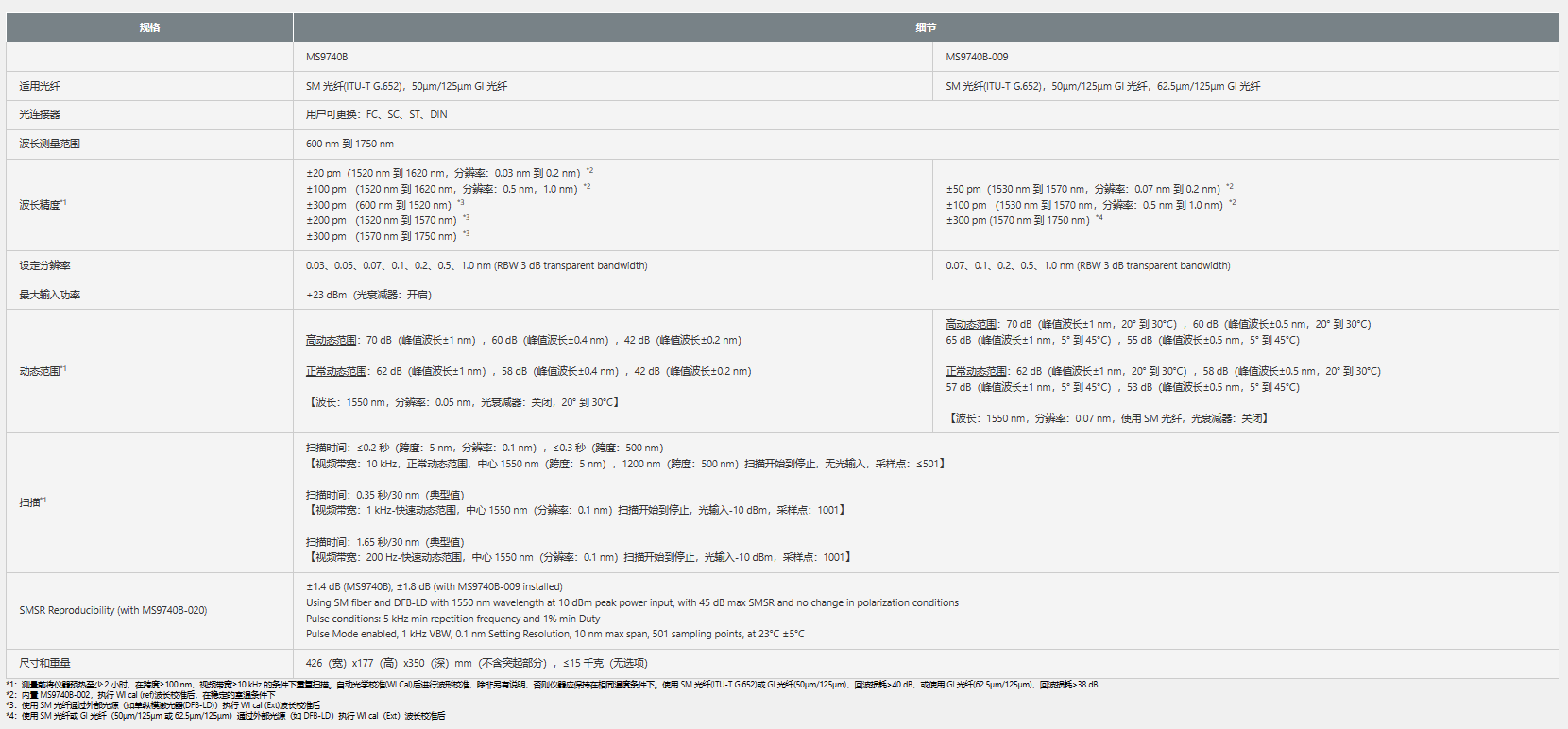
动态范围:根据我搜索到的资料,MS9740B具有超过70dB的宽动态范围。然而,在不同的文献中,关于其动态范围的具体数值有所不同。例如,一项资料提到高动态范围为60dB,普通动态范围为58dB。这表明MS9740B的设计旨在提供广泛的测量范围,以适应不同的测试需求。
-
分辨率:MS9740B的分辨率为0.05nm,在1550nm波长下,且在光衰减关闭(Att: Off)的情况下,在20~30℃的温度条件下测量得到。这一分辨率的提高意味着MS9740B能够更精确地测量光谱中的细微差异,对于需要高精度测量的应用场景尤为重要。
-
测量处理时间:MS9740B将测量处理时间缩短了一半,同时克服了处理速度加快导致的测量灵敏度下降的问题。这一点虽然不直接涉及动态范围和分辨率的量化,但它表明了MS9740B在提高效率的同时,也保持了高性能的测量能力。
-
支持多模光纤输入:MS9740B支持多模光纤输入,这使得它能够适用于制造和评估850nm波段VCSEL模块等多种应用场景。这种灵活性进一步增强了其在不同应用中的适用性和性能。
MS9740B在动态范围和分辨率方面的改进主要体现在其宽广的动态范围、高分辨率以及快速的测量处理能力上。这些改进使得MS9740B能够满足更广泛、更高精度的测量需求,特别是在光通信、光电子设备制造等领域。
MS9740B支持简化的分析过程具体是如何实现的?
MS9740B支持简化的分析过程主要通过以下几个方面实现:
-
全频段实时频谱分析:MS9740B能够进行全频段的实时频谱分析,这意味着它能够捕获偶发或瞬态信号,从而减少了测试的时间和复杂性。
-
一体化设计:MS9740B是一款集成了SM和MM光纤的一体化光谱分析仪。这种设计减少了从波形扫描到数据传输到外部控制设备所需的总时间,使得整个分析过程更加简化和高效。
-
自动光学校准和波形校准:在进行测量之前,MS9740B需要预热至少2小时,并且在特定条件下(跨度≥100 nm,视频带宽≥10 kHz)重复扫描。之后进行自动光学校准(WI Cal)和波形校准,这些自动化的校准过程减少了人工干预,进一步简化了操作流程44。
-
MM模式功能:MS9740B具有MM模式功能,用于校正连接50 µm/125 µm多模光纤时的损耗,并显示水平。这一功能简化了多模光纤测试的过程,使得用户可以更快速、准确地完成测试。
MS9740B通过其全频段实时频谱分析能力、一体化设计、自动化的校准过程以及MM模式功能等特性,实现了分析过程的简化,提高了测试效率和准确性。
MS9740B对测量灵敏度的影响及其优化措施是什么?
MS9740B对测量灵敏度的影响主要体现在其在保持原有功能和性能的同时,通过优化设计提高了测量处理速度。MS9740B在处理速度加快的情况下,成功克服了可能导致测量灵敏度下降的问题。此外,MS9740B与前一代产品MS9740A相比,在保持相同的测量灵敏度性能、功能和尺寸的同时,将测量处理时间缩短了50%。这表明MS9740B在提高生产效率的同时,也确保了测量的准确性和灵敏度。
为了进一步优化MS9740B的测量灵敏度,采取了以下措施:首先,通过优化用户常用的光谱分析仪MS9740B光接收机带宽设置,提高了生产线效率。其次,MS9740B-020版本引入了新的测量功能,用于评估脉冲激光二极管(LD)芯片,这一新解决方案减少了脉冲LD芯片的测试时间,从而提高了高功率LD芯片的生产效率。这些优化措施不仅提升了MS9740B的性能,还确保了在高速测量过程中不会牺牲测量的灵敏度。
MS9740B通过优化设计和技术改进,在提高测量处理速度的同时,有效保持了测量灵敏度,并通过特定的优化措施进一步提升了生产效率和测量准确性。
原文转载:Anritsu MS9740B与MS9740A 光谱分析仪 的区别? (megatechsz.com)
这篇关于Anritsu MS9740B与MS9740A 光谱分析仪 的区别?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





