本文主要是介绍图神经网络学习实践——Zachary’s karate club Problem,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
图神经网络是一类比较特殊的神经网络,这里的图不同于我们卷积神经网络里面所使用到的图像,而是指的是node和edge组成的具有拓扑结构的图,这一类型的数据和应用我在平时的工作实践中接触得还是比较少的,正好就当做是学习了。
DGL是一个Python软件包,专门用于在图上进行深度学习,它构建在顶部现有的张量DL框架(例如Pytorch,MXNet)并简化了基于图的神经网络的实现。
这里DGL的安装也是很简单的,具体的安装方案可以参考这里。
windows下的安装命令如下:
pip install dgl整体的安装是很简单的。
本文主要是实践DGL官网的教程【扎卡里的空手道俱乐部问题】。 空手道俱乐部是一个社交网络,由34名成员组成,并记录俱乐部外部互动的成员之间的成对链接。 俱乐部随后分为两个社区,由教员(节点0)和俱乐部主席(节点33)领导。 网络的可视化如下,其颜色指示社区:

该教程的任务是预测给定社交网络本身每个成员倾向于加入哪一侧(0或33)。
Step 1: Creating a graph in DGL
首先初始化创建图,代码实现如下所示:
def build_karate_club_graph():'''所有78条边都存储在两个numpy数组中, 一个用于源端点而另一个用于目标端点'''src = np.array([1, 2, 2, 3, 3, 3, 4, 5, 6, 6, 6, 7, 7, 7, 7, 8, 8, 9, 10, 10,10, 11, 12, 12, 13, 13, 13, 13, 16, 16, 17, 17, 19, 19, 21, 21,25, 25, 27, 27, 27, 28, 29, 29, 30, 30, 31, 31, 31, 31, 32, 32,32, 32, 32, 32, 32, 32, 32, 32, 32, 33, 33, 33, 33, 33, 33, 33,33, 33, 33, 33, 33, 33, 33, 33, 33, 33])dst = np.array([0, 0, 1, 0, 1, 2, 0, 0, 0, 4, 5, 0, 1, 2, 3, 0, 2, 2, 0, 4,5, 0, 0, 3, 0, 1, 2, 3, 5, 6, 0, 1, 0, 1, 0, 1, 23, 24, 2, 23,24, 2, 23, 26, 1, 8, 0, 24, 25, 28, 2, 8, 14, 15, 18, 20, 22, 23,29, 30, 31, 8, 9, 13, 14, 15, 18, 19, 20, 22, 23, 26, 27, 28, 29, 30,31, 32])#边缘在DGL中是有方向的; 使它们双向u = np.concatenate([src, dst])v = np.concatenate([dst, src])#构建图return dgl.DGLGraph((u, v))在新构建的图中打印出节点和边的数量
G = build_karate_club_graph()
print('We have %d nodes.' % G.number_of_nodes())
print('We have %d edges.' % G.number_of_edges())结果如下所示:
![]()
接下来基于networkx来对图进行可视化,代码实现如下所示:
#通过将其转换为networkx图来可视化该图
nx_G = G.to_networkx().to_undirected()
pos = nx.kamada_kawai_layout(nx_G)
nx.draw(nx_G, pos, with_labels=True, node_color=[[.7, .7, .7]])
plt.savefig('graph.png')结果如下所示:

这里基于networkx绘制的是无向图。
Step 2: Assign features to nodes or edges
图神经网络将特征与节点和边关联以进行训练。 对于我们的分类示例,由于没有输入功能,因此我们为每个节点分配了可学习的嵌入向量。代码实现如下所示:
embed = nn.Embedding(34, 5) # 34 nodes with embedding dim equal to 5
G.ndata['feat'] = embed.weight
print(G.ndata['feat'][2])
print(G.ndata['feat'][[10, 11]])结果如下所示:

Step 3: Define a Graph Convolutional Network (GCN)
要执行节点分类,请使用由Kipf和Welling开发的图卷积网络(GCN)。 这是GCN框架的最简单定义。 我们建议您阅读原始文章以获取更多详细信息。

如下所示:
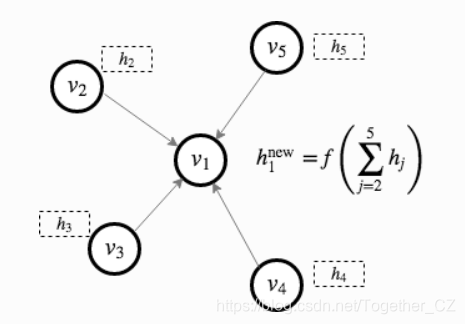
定义一个包含两个GCN层的更深入的GCN模型:
class GCN(nn.Module):def __init__(self, in_feats, hidden_size, num_classes):super(GCN, self).__init__()self.conv1 = GraphConv(in_feats, hidden_size)self.conv2 = GraphConv(hidden_size, num_classes)def forward(self, g, inputs):h = self.conv1(g, inputs)h = torch.relu(h)h = self.conv2(g, h)return h
#初始化网络实例
net = GCN(5, 5, 2)
print('net: ', net)结果如下所示:

Step 4: Data preparation and initialization
我们使用可学习的嵌入来初始化节点特征。 由于这是半监督设置,因此仅为教练(节点0)和俱乐部主席(节点33)分配标签。 该实现如下。
inputs = embed.weight
labeled_nodes = torch.tensor([0, 33]) # only the instructor and the president nodes are labeled
labels = torch.tensor([0, 1]) # their labels are differentStep 5: Train then visualize
训练循环与其他PyTorch模型完全相同。 我们(1)创建一个优化器,(2)将输入输入模型,(3)计算损失,(4)使用自动分级优化模型。
optimizer = torch.optim.Adam(itertools.chain(net.parameters(), embed.parameters()), lr=0.01)
all_logits = []
for epoch in range(50):logits = net(G, inputs)# we save the logits for visualization laterall_logits.append(logits.detach())logp = F.log_softmax(logits, 1)# we only compute loss for labeled nodesloss = F.nll_loss(logp[labeled_nodes], labels)optimizer.zero_grad()loss.backward()optimizer.step()print('Epoch %d | Loss: %.4f' % (epoch, loss.item()))结果如下所示:

这是一个很有趣的示例,因此甚至没有验证或测试集。 相反,由于模型为每个节点生成大小为2的输出特征,因此我们可以通过在2D空间中绘制输出特征来可视化。 以下代码使训练过程从最初的猜测(根本没有对节点进行正确分类)到最终的结果(使节点线性可分离)动画化。
def draw(i):cls1color = '#00FFFF'cls2color = '#FF00FF'pos = {}colors = []for v in range(34):pos[v] = all_logits[i][v].numpy()cls = pos[v].argmax()colors.append(cls1color if cls else cls2color)ax.cla()ax.axis('off')ax.set_title('Epoch: %d' % i)nx.draw_networkx(nx_G.to_undirected(), pos, node_color=colors,with_labels=True, node_size=300, ax=ax)fig = plt.figure(dpi=150)
fig.clf()
ax = fig.subplots()
draw(0)
plt.savefig('0.png')结果如下所示:

以下动画显示了经过一系列训练后,模型如何正确预测社区。
今天是图神经网络的初步实践,后面有时间会继续学习。
完整代码如下所示:
#!usr/bin/env python
#encoding:utf-8
from __future__ import division"""
__Author__:沂水寒城
DGL概览:DGL是一个Python软件包,专门用于在图上进行深度学习,它构建在顶部现有的张量DL框架(例如Pytorch,MXNet)并简化了基于图的神经网络的实现。
"""import dgl
import numpy as np
import networkx as nx
import torch
import torch.nn as nn
import torch.nn.functional as F
from dgl.nn.pytorch import GraphConv
import itertools
import matplotlib.animation as animation
import matplotlib.pyplot as plt#Step 1: Creating a graph in DGL
def build_karate_club_graph():'''所有78条边都存储在两个numpy数组中, 一个用于源端点而另一个用于目标端点'''src = np.array([1, 2, 2, 3, 3, 3, 4, 5, 6, 6, 6, 7, 7, 7, 7, 8, 8, 9, 10, 10,10, 11, 12, 12, 13, 13, 13, 13, 16, 16, 17, 17, 19, 19, 21, 21,25, 25, 27, 27, 27, 28, 29, 29, 30, 30, 31, 31, 31, 31, 32, 32,32, 32, 32, 32, 32, 32, 32, 32, 32, 33, 33, 33, 33, 33, 33, 33,33, 33, 33, 33, 33, 33, 33, 33, 33, 33])dst = np.array([0, 0, 1, 0, 1, 2, 0, 0, 0, 4, 5, 0, 1, 2, 3, 0, 2, 2, 0, 4,5, 0, 0, 3, 0, 1, 2, 3, 5, 6, 0, 1, 0, 1, 0, 1, 23, 24, 2, 23,24, 2, 23, 26, 1, 8, 0, 24, 25, 28, 2, 8, 14, 15, 18, 20, 22, 23,29, 30, 31, 8, 9, 13, 14, 15, 18, 19, 20, 22, 23, 26, 27, 28, 29, 30,31, 32])#边缘在DGL中是有方向的; 使它们双向u = np.concatenate([src, dst])v = np.concatenate([dst, src])#构建图return dgl.DGLGraph((u, v))#在新构建的图中打印出节点和边的数量
G = build_karate_club_graph()
print('We have %d nodes.' % G.number_of_nodes())
print('We have %d edges.' % G.number_of_edges())
#通过将其转换为networkx图来可视化该图
nx_G = G.to_networkx().to_undirected()
pos = nx.kamada_kawai_layout(nx_G)
nx.draw(nx_G, pos, with_labels=True, node_color=[[.7, .7, .7]])
plt.savefig('graph.png')# Step 2: Assign features to nodes or edges
embed = nn.Embedding(34, 5) # 34 nodes with embedding dim equal to 5
G.ndata['feat'] = embed.weight
print(G.ndata['feat'][2])
print(G.ndata['feat'][[10, 11]])# Step 3: Define a Graph Convolutional Network (GCN)
class GCN(nn.Module):def __init__(self, in_feats, hidden_size, num_classes):super(GCN, self).__init__()self.conv1 = GraphConv(in_feats, hidden_size)self.conv2 = GraphConv(hidden_size, num_classes)def forward(self, g, inputs):h = self.conv1(g, inputs)h = torch.relu(h)h = self.conv2(g, h)return h
#初始化网络实例
net = GCN(5, 5, 2)
print('net: ', net)# Step 4: Data preparation and initialization
inputs = embed.weight
labeled_nodes = torch.tensor([0, 33]) #
labels = torch.tensor([0, 1]) # Step 5: Train then visualize
optimizer = torch.optim.Adam(itertools.chain(net.parameters(), embed.parameters()), lr=0.01)
all_logits = []
for epoch in range(50):logits = net(G, inputs)# we save the logits for visualization laterall_logits.append(logits.detach())logp = F.log_softmax(logits, 1)# we only compute loss for labeled nodesloss = F.nll_loss(logp[labeled_nodes], labels)optimizer.zero_grad()loss.backward()optimizer.step()print('Epoch %d | Loss: %.4f' % (epoch, loss.item()))def draw(i):cls1color = '#00FFFF'cls2color = '#FF00FF'pos = {}colors = []for v in range(34):pos[v] = all_logits[i][v].numpy()cls = pos[v].argmax()colors.append(cls1color if cls else cls2color)ax.cla()ax.axis('off')ax.set_title('Epoch: %d' % i)nx.draw_networkx(nx_G.to_undirected(), pos, node_color=colors,with_labels=True, node_size=300, ax=ax)fig = plt.figure(dpi=150)
fig.clf()
ax = fig.subplots()
draw(0)
plt.savefig('0.png')ani = animation.FuncAnimation(fig, draw, frames=len(all_logits), interval=200)
plt.savefig('1.png')这篇关于图神经网络学习实践——Zachary’s karate club Problem的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







