本文主要是介绍【路径规划】基于matlab蚁群优化遗传算法机器人栅格地图最短路径规划【含Matlab源码 1581期】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
🍎个人主页:海神之光
🏆代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
⛳️座右铭:行百里者,半于九十。
更多Matlab仿真内容点击👇
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
⛄一、简介
路径规划是实现移动机器人自主导航的关键技术,是指在有障碍物的环境中,按照一定的评价标准(如距离、时间、能耗等),寻找到一条从起始点到目标点的无碰撞路径,这里选取最短距离路径规划的评价标准,即最短路径规划问题。
1.路径规划数学模型的建立
将移动机器人周围环境用一组数据进行抽象表达,建立二维或三维的环境模型,得到移动机器人能够理解分析的环境数据,是机器人路径规划的基本前提。我这里用的是栅格法,其原理是将周围环境看成一个二维平面,将平面分成一个个等面积大小的具有二值信息的栅格,每个栅格中存储着周围环境信息量,下图我给出了一个栅格法地图,方便大家更好的理解栅格地图。这里设计的栅格地图为一个20×20的地形矩阵,黑色的地方表示有障碍,白色的地方表示没有障碍。
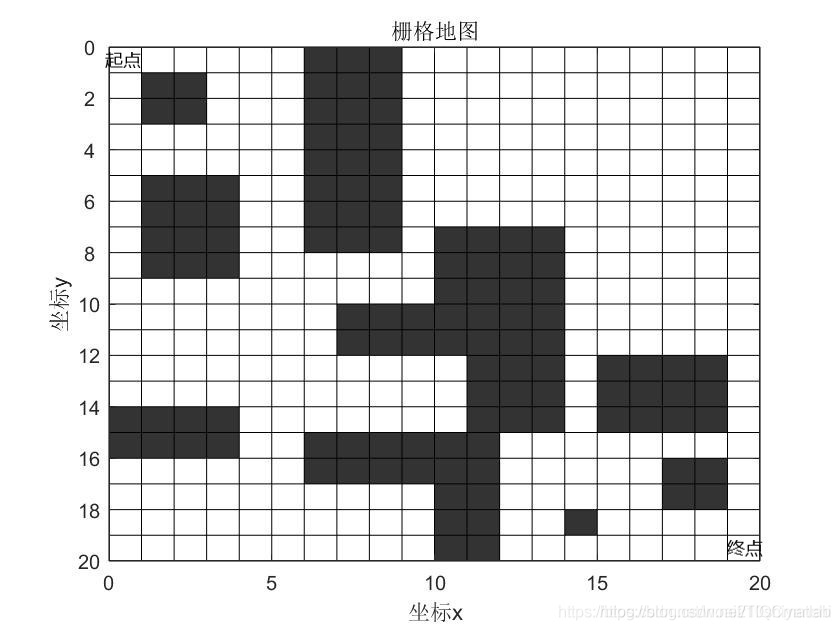
图1 栅格法地图
在用栅格法建立环境模型时,为了将环境信息转换成移动机器人可以识别的数据,一般采用序号法标记环境地图信息,即将栅格地图中一个个栅格从序号1依次累加直到标记到最后一个栅格。如图2所示。
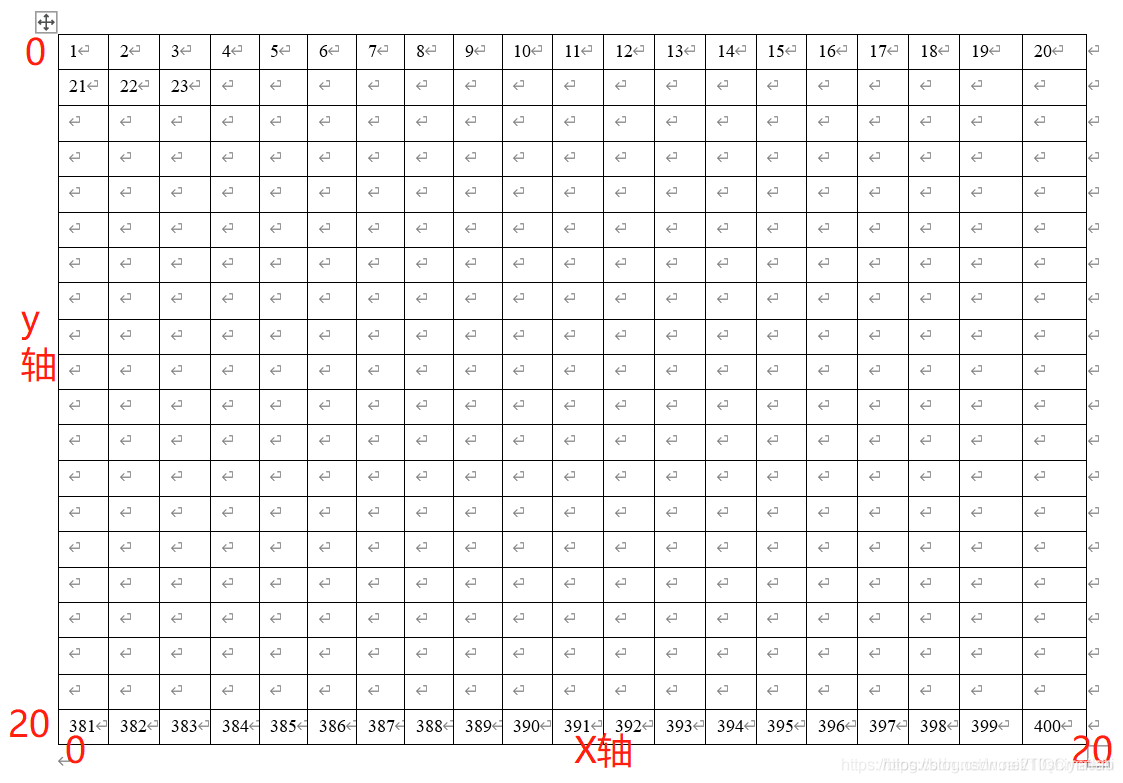
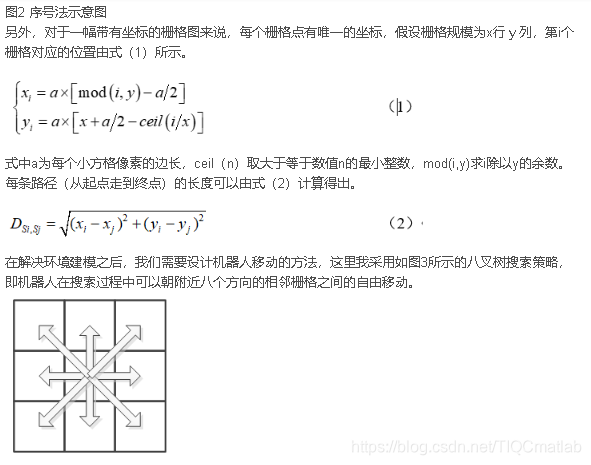
图3 八叉树搜索策略
那么,怎么判断一个栅格点是否为另一个栅格点的相邻栅格点呢,另外,又怎么判断是否为有障碍栅格呢。这就需建立矩阵D,记录每个栅格点至其相邻栅格点的代价值。本例中栅格地图有20×20个栅格点,则D的大小为400×400,其中列是起点栅格,行是局部终点栅格,各栅格点至其各相邻无障碍栅格点的代价值非零,而有障碍栅格及非相邻栅格设为0。
2.机器人最短路径规划的实现步骤
蚁周模型实现机器人最短路径规划的流程图
为了方便大家更好地理解蚁群算法的原理及实现过程,其流程图如图4所示。(流程图较长,我截图了两段。)
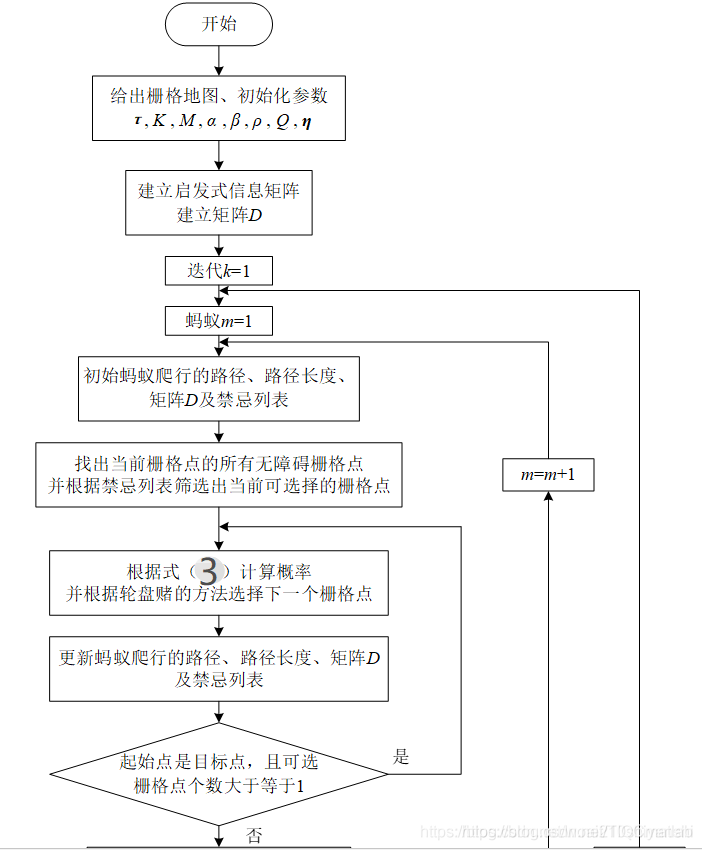
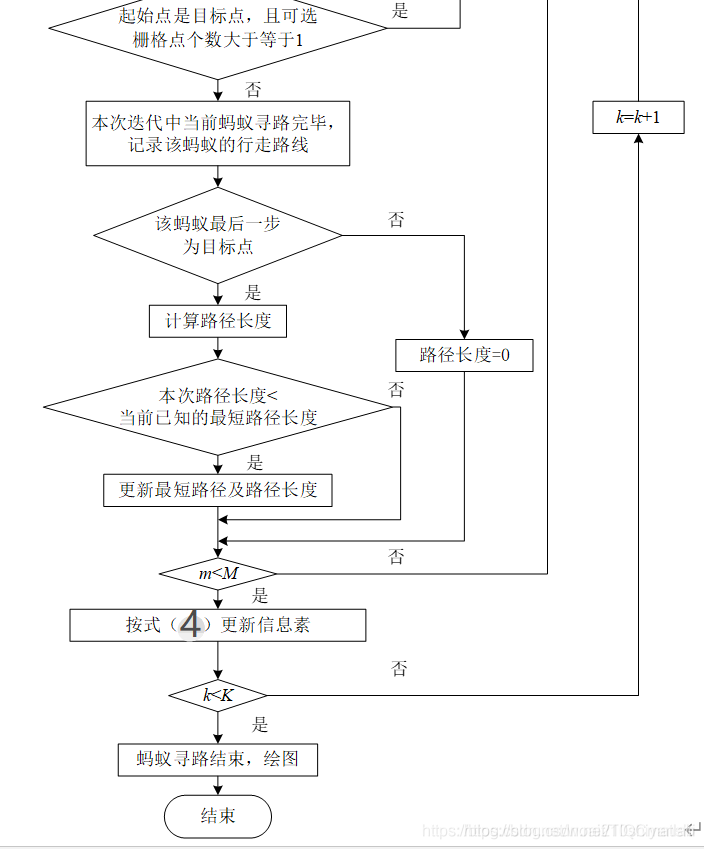
图4 基于蚁群算法的机器人最小路径规划流程图
图中公式(3)(4)的具体表达在下边的具体步骤里。
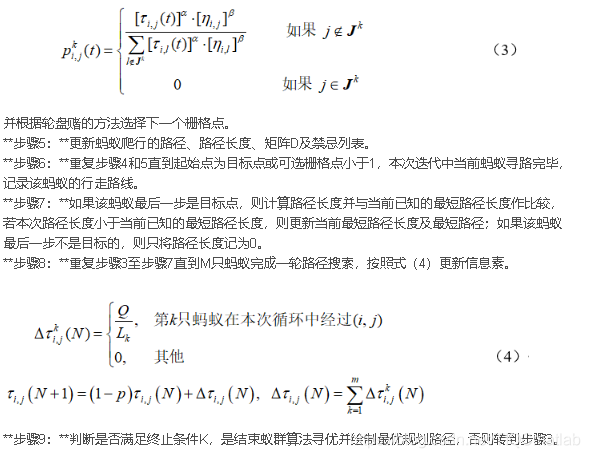
蚁周模型实现机器人最短路径规划的具体步骤
**步骤1:**给出栅格地图的地形矩阵;初始化信息素矩阵 Tau(记录每个栅格至其他栅格的信息素量),最大迭代次数K,蚂蚁个数M,表征信息素重要程度的参数 、表征启发式信息重要程度的参数 ,信息素蒸发系数 ,信息素增加强度系数Q及启发式信息矩阵
**步骤2:**构建启发式信息矩阵。按式(1)和式(2)计算每个栅格至目标点的距离,启发式信息素取为至目标点距离的倒数,距离越短,启发式因子越大,障碍物处的启发式信息为0。建立矩阵D,用以存储每个栅格点至各自相邻无障碍栅格点的代价值。
**步骤3:**对于每一只蚂蚁,初始化蚂蚁爬行的路径及路径长度,将禁忌列表全部初始化为1;蚂蚁从起始点出发开始搜索路径,找出当前栅格点的所有无障碍相邻栅格点(即矩阵D中相应元素不为0的栅格点),再根据禁忌列表筛选出当前可选择的栅格点。
**步骤4:**如果起始点是目标点,且可选栅格点个数大于等于1,则根据式(3)计算蚂蚁从当前栅格点转移到各相邻栅格点的概率,
⛄二、部分源代码
clear;clc
close all;
tic
G=[0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 1 1 1 1 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 1 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 1 1 1 0;
1 1 1 1 0 0 0 0 0 0 0 0 1 1 0 1 1 1 1 0;
1 1 1 1 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 0 1 1 1 0 0 0 0 0 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0;
0 0 1 1 0 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0;];
%地图矩阵
n=size(G,1);%n表示地图大小
m=50; %% m 蚂蚁个数
Alpha=2; %% Alpha 表征信息素重要程度的参数
Beta=6; %% Beta 表征启发式因子重要程度的参数
Rho=0.1; %% Rho 信息素蒸发系数
NC_max=100; %%最大迭代次数
Q=1; %%信息素增加强度系数
Tau=ones(n,n); %Tau为信息素矩阵
NC=1; %迭代计数器,记录迭代次数
r_e=1; c_e=20;%地图终点在矩阵中的位置%可以通过position2rc函数产生
s=n;%路径起始点在矩阵中的位置
position_e=n*(n-1)+1;%路径终点在矩阵中的位置
min_PL_NC_ant=inf;%%蚂蚁最短的行进距离
min_ant=0;%%最短行进距离的蚂蚁坐标
min_NC=0;%%最短行进距离的迭代次数
% 计算邻接矩阵及启发因子%%邻接矩阵作用是计算启发因子
z=1;
max_generation=200;
p_crossover=0.2;
p_mutation=0.05;
weight_length=20;
weight_smooth=1;
new_population={};
for i=1:n
for j=1:n
if G(i,j)0
D(i,j)=((i-r_e)2+(j-c_e)2)^0.5;
else
D(i,j)=inf; %i=j时不计算,应该为0,但后面的启发因子要取倒数,用eps(浮点相对精度)表示
end
end
end
D(r_e,c_e)=0.05;
Eta=1./D; %Eta为启发因子,这里设为到终点距离的倒数
Tau=10.Eta;%%%%%创新点%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%计算移动矩阵
D_move=zeros(nn,8);%%D_move每一行代表与行标对应元素,可以前往的下一个节点的位置
for point=1:n*n
if G(point)0
[r,c]=position2rc(point);
move=1;
for k=1:n
for m1=1:n
im=abs(r-k);
jn=abs(c-m1);
if im+jn1||(im1&&jn==1)
if G(k,m1)==0
D_move(point,move)=(m1-1)n+k;
move=move+1;
end
end
end
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%移动矩阵和邻接矩阵计算完成,检查无误%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%开始迭代
routes=cell(NC_max,m);%%%%存储每次迭代每个蚂蚁的路径
PL=zeros(NC_max,m); %%%%%存储每次迭代每个蚂蚁的路径长度
while NC<=NC_max
for ant=1:m
current_position=s;%%%当前位置为起始点
path=s;%%路径初始化
PL_NC_ant=0;%%长度初始化
Tabu=ones(1,nn); %%%%禁忌表,排除已经走过的位置
Tabu(s)=0;%%排除已经走过的初始点
D_D=D_move;%%%%D_D是D_move的中间矩阵,作用是为了不让D_move参与计算,也可不用D_D矩阵,直接用D_move
D_work=D_D(current_position,:);%%%把当前点可以前往的写一个节点的信息传送给D_work
nonzeros_D_work=find(D_work);%%%找到不为0的元素的位置
for i1=1:length(nonzeros_D_work)
if Tabu(D_work(i1))==0
D_work(nonzeros_D_work(i1))=[];%%将禁忌表中已走过的元素删除,防止走已经走过的位置
D_work=[D_work,zeros(1,8-length(D_work))];%%%保证D_work向量长度为8(每个点最多能往周围的8个点走),为后面for循环做准备
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%排除走过的第一点(排除起点)%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
len_D_work=length(find(D_work));
while current_position~=position_e&&len_D_work>=1%%当前点是否为终点或者走进死胡同
p=zeros(1,len_D_work);
for j1=1:len_D_work
[r1,c1]=position2rc(D_work(j1));%%利用自己编的函数把可以前进的点计算为行列表示
p(j1)=(Tau(r1,c1)Alpha)*(Eta(r1,c1)Beta);%%%%计算每个可以前往的节点的概率
end
p=p/sum§;%%%归一化
pcum=cumsum§;%%%概率累加
select=find(pcum>=rand);%%%%轮盘赌法选择下个节点
to_visit=D_work(select(1));%%%前往下一个节点
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%到达下一个节点%%%%%%%%%%%%%%%%%%%%%%%%
path=[path,to_visit];%%%路径累加
dis=distance(current_position,to_visit);%%%计算到下个节点的距离
PL_NC_ant=PL_NC_ant+dis;%%距离累加
current_position=to_visit;%%%当前点设为前往点
D_work=D_D(current_position,:);%%%%把当前节点可以前往的下一个节点的信息传给D_work
Tabu(current_position)=0;%%%禁忌表中排除已经到的点
for kk=1:400
if Tabu(kk)==0
for i3=1:8
if D_work(i3)==kk
D_work(i3)=[];%%%%排除禁忌表中已经走过的节点
D_work=[D_work,zeros(1,8-length(D_work))];%%保证长度为8
end
end
end
end
len_D_work=length(find(D_work));%%%计算当前点可以前往的下一个节点的数量
end
%%%%%%%%%%%%%%%%%%%%%%%%迭代一次所有蚂蚁走完%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
routes{NC,ant}=path;%%%把蚂蚁走过的路径记录下来
if path(end)==position_e
PL(NC,ant)=PL_NC_ant;%%记录到达终点的蚂蚁的行进距离
if PL_NC_ant<min_PL_NC_ant
min_NC=NC;min_ant=ant;min_PL_NC_ant=PL_NC_ant;%%记录路径最短的蚂蚁的迭代次数和属于那一只
end
else
PL(NC,ant)=0;
end
end
⛄三、运行结果


⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]周东健,张兴国,马海波,李成浩,郭旭.基于栅格地图-蚁群算法的机器人最优路径规划[J].南通大学学报(自然科学版). 2013,12(04)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
这篇关于【路径规划】基于matlab蚁群优化遗传算法机器人栅格地图最短路径规划【含Matlab源码 1581期】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



