本文主要是介绍ROS 2边学边练(5)-- 何为服务(services),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
概念
服务是ROS世界中的另外一种通信方式,遵循一种经典的C/S架构(有过socket编程经验的同学应该对此不陌生),客户端节点通过服务向服务端节点发起请求(获取某种数据或功能),服务端收到请求后回复给发起该请求的客户端节点信息(通过服务),而不会像主题那样一旦订阅者订阅了主题,发布者会不断的通过主题发布消息(有数据产生的情况下)给所有订阅者,服务只是客户端请求一次,服务端回复一次,而已。下面我们来看看服务在ROS图中的几种场景吧(帮助理解)。

(一个客户端节点)

(多个客户端节点)
总结上面的两幅图的中心思想,服务是一种点对点的通信方式,客户端节点(一个或多个)可以共用同一个服务来向服务端节点(一个,一个服务只能对应一个服务端节点)发起请求,但服务端节点只能回复给发起请求的客户端节点。
服务一般适用于有实时性要求(服务是一种同步机制,发出请求会一直等待回复响应)及可能有一定逻辑处理的情况(发出参数数据希望能得到一种综合处理结果,有点类似那种我告诉你我的生辰八字,你给我算算命理的情况一样)。
动动手
我们还是拿小海龟来说事吧(小海龟估计烦死了)。
启动小海龟
两个终端分别启动两个节点,分别是turtle_node和turtle_teleop_key,命令如下:
$ros2 run turtlesim turtlesim_node$ros2 run turtlesim turtle_teleop_key服务列表
同前面的主题列表查看方式一样,我们可以通过下面的命令查看当前活动的服务列表:
$ros2 service list
可以看到两个节点都有6个相同的带parameters的服务,在ROS中几乎每个节点都可能会有这些服务,但今天我们先不讨论这个,我们主要关注体验下/clear、/kill、/reset、/spawn、/turtle1/set_pen、/turtle1/teleport_absolute、/turtle1/teleport_relative这些服务(我们可以在rqt里面call这些服务,前面的文章有例子)。
服务数据类型
每种通信方式都有其协定的数据结构类型才能正常进行交流,服务也不例外,我们通过下面命令进行查看:
$ros2 service type <service_name>就拿/clear服务来举例,ros2 service type /clear,返回如下,

Empty这种服务数据类型就代表发起的请求及回复都没有数据。
也可以通过增加-t来显示当前所有服务的数据类型。
$ros2 service list -t
寻找服务(带某种服务数据类型)
既然我们可以查看当前所有服务及其对应的数据类型,那么我们是不是也可以通过数据类型来查看使用这种数据类型的服务有哪些呢?
$ros2 service find <type_name>喏,上面就是使用方法,我们从上面随便选一两个数据类型来查查看。

数据类型详情查看
老规矩,直接interface show查看,
$ros2 interface show <type_name>先来Empty,

返回三道杠,何意?三道杠上面的代表请求数据类型,三道杠下面的代表回复的数据类型,正如上文所说,Empty数据类型是既无请求数据也无回复数据,所以表现出来的就是大家看到的这样。

我们再来看看turtlesim/srv/Spawn服务数据类型,请求数据类型是3个flat32类型(浮点数)数据以及一个string类型(字符串)数据,x、y、theta为坐标角度相关的数据,name为节点对象的名字(可指定,如不指定,系统会自动赋值一个),然后系统会根据请求的数据消息返回生成对象的最终名字作为这次请求的回复响应。
调用服务(命令行)
$ros2 service call <service_name> <service_type> <arguments>我们手动调用一个服务来练练手,比如还是拿/clear这个服务(数据类型为Empty,不需要参数,简单)来试,试之前我们先让小海龟热热身,在海洋上画出点痕迹出来,然后我们调用/clear服务,看看会发生什么。

$ros2 service call /clear std_srvs/srv/Empty
痕迹抹除啦。下面我们来点有难度的,新孵化出一只海龟,这个可就需要参数啦(注意参数的语法格式必须是YAML),名字我们不取,看看服务会给我们返回什么样的雅名。
$ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
如果主动取个名字呢。

打印服务数据
前面我们可以通过echo来展示主题间各节点通信的具体数据内容,我们看服务是不是也一样,官方文档给出的查看命令如下:
$ros2 service echo <service_name | service_type> <arguments>根据手册在查看之前,我们还必须先手动打开service_configure_introspection及client_configure_introspection(默认是关闭的),这种操作个人感觉还是有点不方便的,为了方便表述,我们拿另外一个例子来说明。
先调用py脚本启动示例,
$ros2 launch demo_nodes_cpp introspect_services_launch.py
不断再刷上面的内容(2+3=5),然后再使能C/S的configure_introspection,
$ros2 param set /introspection_service service_configure_introspection contents$ros2 param set /introspection_client client_configure_introspection contents
参数设置成功哈,但是这个例子所运行的服务名称和数据类型是啥呢,看调用的那个py文件也可以,但我们要做符合我们身份的事情,敲行命令查查先(应该还记得吧),

就是第一个,服务为/add_two_ints,其数据类型为example/srv/AddTwoInts,差不多了,不对,如果要echo出服务的具体数据,我们还差参数,但是参数是需要知道数据类型的数据结构的(可选项),我们再查查,

好了,万事俱备,开始ros2 service echo吧,先输入下面命令会给出什么提示(因为参数具体给什么此时我心里也没底):
$ros2 service echo /add_two_ints | example_interfaces/srv/AddTwoInts
出错了?提示一共两个错误,其一是没有example_interfaces/srv/AddTwoInts这个文件或目录,其二是这个版本的ros service根本没有echo这个功能,我们根据提示查查看ros service到底支持哪些功能,
$ros2 service -h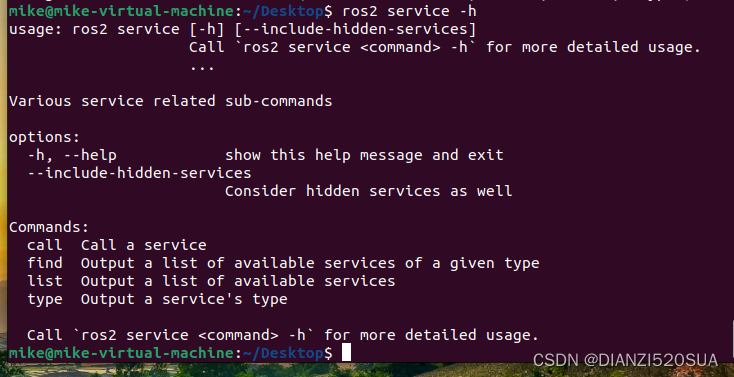
咦,果真没有,ros service仅支持ros2 service call、find、list、type这四个功能,看来还是印证了那句老话,尽信书(权威)不如无书,唯有实践出真知,路是一个脚印一个脚印走出来的。
本篇完。
这篇关于ROS 2边学边练(5)-- 何为服务(services)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








