本文主要是介绍Stable Baselines/用户向导/示例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Stable Baselines官方文档中文版 Github CSDN
尝试翻译官方文档,水平有限,如有错误万望指正
-
先用Colab Notebook在线试试吧
下述所有示例都可用Google colab Notebooks执行:
- 开始
- 训练、保存、载入
- 多重处理
- 监视训练和及绘图
- Atari游戏
- 强制退出(包括训练好的agent)
- 事后经历回顾
- RL Baselines zoo
-
基础用法:训练、保存、载入
在下述案例,我们会在Lunar Lander(登月飞行器)环境训练、保存并载入一个DQN模型
在Google Colab Notebooks上尝试
LunarLander需要box2d这个Python包。可以先apt install swig再pip install box2d box2d-kengz实现安装
每次调用,
load函数会从头重建模型,这个过程可能较慢。如果你用不同参数数据集评估同一模型,可以考虑用load_parameters来替代。
import gymfrom stable_baselines import DQN# Create environment
env = gym.make('LunarLander-v2')# Instantiate the agent
model = DQN('MlpPolicy', env, learning_rate=1e-3, prioritized_replay=True, verbose=1)
# Train the agent
model.learn(total_timesteps=int(2e5))
# Save the agent
model.save("dqn_lunar")
del model # delete trained model to demonstrate loading# Load the trained agent
model = DQN.load("dqn_lunar")# Enjoy trained agent
obs = env.reset()
for i in range(1000):action, _states = model.predict(obs)obs, rewards, dones, info = env.step(action)env.render()
import gym
import numpy as npfrom stable_baselines.common.policies import MlpPolicy
from stable_baselines.common.vec_env import SubprocVecEnv
from stable_baselines.common import set_global_seeds
from stable_baselines import ACKTRdef make_env(env_id, rank, seed=0):"""Utility function for multiprocessed env.:param env_id: (str) the environment ID:param num_env: (int) the number of environments you wish to have in subprocesses:param seed: (int) the inital seed for RNG:param rank: (int) index of the subprocess"""def _init():env = gym.make(env_id)env.seed(seed + rank)return envset_global_seeds(seed)return _initenv_id = "CartPole-v1"
num_cpu = 4 # Number of processes to use
# Create the vectorized environment
env = SubprocVecEnv([make_env(env_id, i) for i in range(num_cpu)])model = ACKTR(MlpPolicy, env, verbose=1)
model.learn(total_timesteps=25000)obs = env.reset()
for _ in range(1000):action, _states = model.predict(obs)obs, rewards, dones, info = env.step(action)env.render()
-
使用Callback:监控训练
你可以定义一个在agent内部调用的回调函数。有助于监控训练,比如在Tensorboard(或Visdom)中呈现实时学习曲线或保存最佳agent。如果你的回调函数返回False,说明训练异常退出。
在Google Colab Notebook上测试
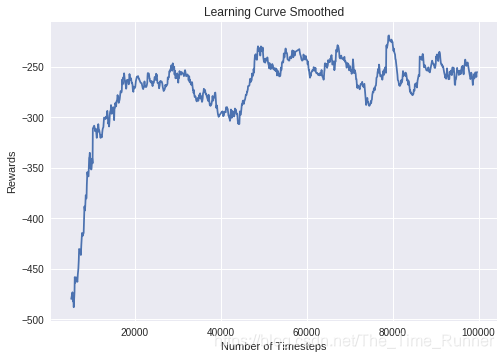
LunarLanderContinuous环境中DDPG的学习曲线
import osimport gym
import numpy as np
import matplotlib.pyplot as pltfrom stable_baselines.ddpg.policies import LnMlpPolicy
from stable_baselines.bench import Monitor
from stable_baselines.results_plotter import load_results, ts2xy
from stable_baselines import DDPG
from stable_baselines.ddpg import AdaptiveParamNoiseSpecbest_mean_reward, n_steps = -np.inf, 0def callback(_locals, _globals):"""Callback called at each step (for DQN an others) or after n steps (see ACER or PPO2):param _locals: (dict):param _globals: (dict)"""global n_steps, best_mean_reward# Print stats every 1000 callsif (n_steps + 1) % 1000 == 0:# Evaluate policy training performancex, y = ts2xy(load_results(log_dir), 'timesteps')if len(x) > 0:mean_reward = np.mean(y[-100:])print(x[-1], 'timesteps')print("Best mean reward: {:.2f} - Last mean reward per episode: {:.2f}".format(best_mean_reward, mean_reward))# New best model, you could save the agent hereif mean_reward > best_mean_reward:best_mean_reward = mean_reward# Example for saving best modelprint("Saving new best model")_locals['self'].save(log_dir + 'best_model.pkl')n_steps += 1return True# Create log dir
log_dir = "/tmp/gym/"
os.makedirs(log_dir, exist_ok=True)# Create and wrap the environment
env = gym.make('LunarLanderContinuous-v2')
env = Monitor(env, log_dir, allow_early_resets=True)# Add some param noise for exploration
param_noise = AdaptiveParamNoiseSpec(initial_stddev=0.1, desired_action_stddev=0.1)
# Because we use parameter noise, we should use a MlpPolicy with layer normalization
model = DDPG(LnMlpPolicy, env, param_noise=param_noise, verbose=0)
# Train the agent
model.learn(total_timesteps=int(1e5), callback=callback)
在Breakout训练好的A2C智体

Pong环境
幸好有make_atari_env帮助函数可以简化Atari游戏RL智体的训练。此函数可为你完成所有预处理和多重处理。
在Google Colab Notebook上测试
from stable_baselines.common.cmd_util import make_atari_env
from stable_baselines.common.vec_env import VecFrameStack
from stable_baselines import ACER# There already exists an environment generator
# that will make and wrap atari environments correctly.
# Here we are also multiprocessing training (num_env=4 => 4 processes)
env = make_atari_env('PongNoFrameskip-v4', num_env=4, seed=0)
# Frame-stacking with 4 frames
env = VecFrameStack(env, n_stack=4)model = ACER('CnnPolicy', env, verbose=1)
model.learn(total_timesteps=25000)obs = env.reset()
while True:action, _states = model.predict(obs)obs, rewards, dones, info = env.step(action)env.render()
-
Mujoco:标准化输入特征
标准化输入特征对于RL智体的成功训练非常重要(默认情况,图像是缩放的而不是其他输入类型),比如在 Mujoco训练的时候。为此存在一个包装器,用于计算输入特征的运算均值和标准差(对奖励也可如此计算)。
我们无法为此例提供一个notebook,因为Mujoco是一个专有引擎,需要一份许可证
import gymfrom stable_baselines.common.policies import MlpPolicy from stable_baselines.common.vec_env import DummyVecEnv, VecNormalize from stable_baselines import PPO2env = DummyVecEnv([lambda: gym.make("Reacher-v2")]) # Automatically normalize the input features env = VecNormalize(env, norm_obs=True, norm_reward=False,clip_obs=10.)model = PPO2(MlpPolicy, env) model.learn(total_timesteps=2000)# Don't forget to save the running average when saving the agent log_dir = "/tmp/" model.save(log_dir + "ppo_reacher") env.save_running_average(log_dir) -
自定义策略网络
Stable baselines为图像(CNN策略)和其他输入类型(Mlp策略)提供默认策略网络。然而,你也可简单地定义一个自定义策略网络架构。(具体见自定义策略部分):
import gymfrom stable_baselines.common.policies import FeedForwardPolicy from stable_baselines.common.vec_env import DummyVecEnv from stable_baselines import A2C# Custom MLP policy of three layers of size 128 each class CustomPolicy(FeedForwardPolicy):def __init__(self, *args, **kwargs):super(CustomPolicy, self).__init__(*args, **kwargs,net_arch=[dict(pi=[128, 128, 128], vf=[128, 128, 128])],feature_extraction="mlp")model = A2C(CustomPolicy, 'LunarLander-v2', verbose=1) # Train the agent model.learn(total_timesteps=100000) -
获取并调整模型参数
load_parameters和get_parameters函数用字典将变量名映射到Numpy数组,可通过他们获取模型参数。当你评估大量相同网络结构模型、可视化不同网络层、手动调参时,这些函数很有用。
你可以用
get_parameter_list实现访问原始Tensorflow变量。下述案例演示了读取参数、调参、通过实现解决CartPole-v1环境的演化策略来载入他们。通过对模型进行A2C策略梯度更新可获得参数的初始估计。
import gym import numpy as npfrom stable_baselines.common.policies import MlpPolicy from stable_baselines.common.vec_env import DummyVecEnv from stable_baselines import A2Cdef mutate(params):"""Mutate parameters by adding normal noise to them"""return dict((name, param + np.random.normal(size=param.shape))for name, param in params.items())def evaluate(env, model):"""Return mean fitness (sum of episodic rewards) for given model"""episode_rewards = []for _ in range(10):reward_sum = 0done = Falseobs = env.reset()while not done:action, _states = model.predict(obs)obs, reward, done, info = env.step(action)reward_sum += rewardepisode_rewards.append(reward_sum)return np.mean(episode_rewards)# Create env env = gym.make('CartPole-v1') env = DummyVecEnv([lambda: env]) # Create policy with a small network model = A2C(MlpPolicy, env, ent_coef=0.0, learning_rate=0.1,policy_kwargs={'net_arch': [8, ]})# Use traditional actor-critic policy gradient updates to # find good initial parameters model.learn(total_timesteps=5000)# Get the parameters as the starting point for ES mean_params = model.get_parameters()# Include only variables with "/pi/" (policy) or "/shared" (shared layers) # in their name: Only these ones affect the action. mean_params = dict((key, value) for key, value in mean_params.items()if ("/pi/" in key or "/shared" in key))for iteration in range(10):# Create population of candidates and evaluate thempopulation = []for population_i in range(100):candidate = mutate(mean_params)# Load new policy parameters to agent.# Tell function that it should only update parameters# we give it (policy parameters)model.load_parameters(candidate, exact_match=False)fitness = evaluate(env, model)population.append((candidate, fitness))# Take top 10% and use average over their parameters as next mean parametertop_candidates = sorted(population, key=lambda x: x[1], reverse=True)[:10]mean_params = dict((name, np.stack([top_candidate[0][name] for top_candidate in top_candidates]).mean(0))for name in mean_params.keys())mean_fitness = sum(top_candidate[1] for top_candidate in top_candidates) / 10.0print("Iteration {:<3} Mean top fitness: {:.2f}".format(iteration, mean_fitness)) -
迭代策略
这个示例展示如何训练并测试一个递归策略。
迭代策略的一个当前限制是,你必须用与训练时相同数量的环境进行测试。
from stable_baselines import PPO2# For recurrent policies, with PPO2, the number of environments run in parallel # should be a multiple of nminibatches. model = PPO2('MlpLstmPolicy', 'CartPole-v1', nminibatches=1, verbose=1) model.learn(50000)# Retrieve the env env = model.get_env()obs = env.reset() # Passing state=None to the predict function means # it is the initial state state = None # When using VecEnv, done is a vector done = [False for _ in range(env.num_envs)] for _ in range(1000):# We need to pass the previous state and a mask for recurrent policies# to reset lstm state when a new episode beginaction, state = model.predict(obs, state=state, mask=done)obs, reward , done, _ = env.step(action)# Note: with VecEnv, env.reset() is automatically called# Show the envenv.render() -
事后经验回放(HER)
在此例,我们用 @eleurent提供的Highway-Env。
在Google Colab Notebook上测试
parking环境是一个以目标为环境的连续控制任务,车辆必须停在划定范围内。
下述超参数是上述环境下的优化
import gym
import highway_env
import numpy as npfrom stable_baselines import HER, SAC, DDPG, TD3
from stable_baselines.ddpg import NormalActionNoiseenv = gym.make("parking-v0")# Create 4 artificial transitions per real transition
n_sampled_goal = 4# SAC hyperparams:
model = HER('MlpPolicy', env, SAC, n_sampled_goal=n_sampled_goal,goal_selection_strategy='future',verbose=1, buffer_size=int(1e6),learning_rate=1e-3,gamma=0.95, batch_size=256,policy_kwargs=dict(layers=[256, 256, 256]))# DDPG Hyperparams:
# NOTE: it works even without action noise
# n_actions = env.action_space.shape[0]
# noise_std = 0.2
# action_noise = NormalActionNoise(mean=np.zeros(n_actions), sigma=noise_std * np.ones(n_actions))
# model = HER('MlpPolicy', env, DDPG, n_sampled_goal=n_sampled_goal,
# goal_selection_strategy='future',
# verbose=1, buffer_size=int(1e6),
# actor_lr=1e-3, critic_lr=1e-3, action_noise=action_noise,
# gamma=0.95, batch_size=256,
# policy_kwargs=dict(layers=[256, 256, 256]))model.learn(int(2e5))
model.save('her_sac_highway')# Load saved model
model = HER.load('her_sac_highway', env=env)obs = env.reset()# Evaluate the agent
episode_reward = 0
for _ in range(100):action, _ = model.predict(obs)obs, reward, done, info = env.step(action)env.render()episode_reward += rewardif done or info.get('is_success', False):print("Reward:", episode_reward, "Success?", info.get('is_success', False))episode_reward = 0.0obs = env.reset()
-
持续学习
你还可以从一个环境的学习转移到另一个以实现连续学习(
PPO2先在DemonAttack-v0学习,然后转到SpaceInvaders-v0):from stable_baselines.common.cmd_util import make_atari_env from stable_baselines import PPO2# There already exists an environment generator # that will make and wrap atari environments correctly env = make_atari_env('DemonAttackNoFrameskip-v4', num_env=8, seed=0)model = PPO2('CnnPolicy', env, verbose=1) model.learn(total_timesteps=10000)obs = env.reset() for i in range(1000):action, _states = model.predict(obs)obs, rewards, dones, info = env.step(action)env.render()# The number of environments must be identical when changing environments env = make_atari_env('SpaceInvadersNoFrameskip-v4', num_env=8, seed=0)# change env model.set_env(env) model.learn(total_timesteps=10000)obs = env.reset() while True:action, _states = model.predict(obs)obs, rewards, dones, info = env.step(action)env.render() -
记录视频
记录mp4格式视频(此处使用随机智体)。
本例要求安装
ffmpeg或avconvimport gym from stable_baselines.common.vec_env import VecVideoRecorder, DummyVecEnvenv_id = 'CartPole-v1' video_folder = 'logs/videos/' video_length = 100env = DummyVecEnv([lambda: gym.make(env_id)])obs = env.reset()# Record the video starting at the first step env = VecVideoRecorder(env, video_folder,record_video_trigger=lambda x: x == 0, video_length=video_length,name_prefix="random-agent-{}".format(env_id))env.reset() for _ in range(video_length + 1):action = [env.action_space.sample()]obs, _, _, _ = env.step(action) env.close() -
好处:制作训练好智体的GIF图片
对于Atari游戏,你需要用 Kazam这种屏幕录像。然后用 ffmpeg转换视频
import imageio import numpy as npfrom stable_baselines.common.policies import MlpPolicy from stable_baselines import A2Cmodel = A2C(MlpPolicy, "LunarLander-v2").learn(100000)images = [] obs = model.env.reset() img = model.env.render(mode='rgb_array') for i in range(350):images.append(img)action, _ = model.predict(obs)obs, _, _ ,_ = model.env.step(action)img = model.env.render(mode='rgb_array')imageio.mimsave('lander_a2c.gif', [np.array(img[0]) for i, img in enumerate(images) if i%2 == 0], fps=29)
这篇关于Stable Baselines/用户向导/示例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



