本文主要是介绍Ubuntu18.04 中编译 TI 官方的ros驱动包中 autonomous_robotics_ros 包所存在的问题及解决方案,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
环境:
安装有 ROS 系统的 Ubuntu18.04 环境,并且已将 TI 官方的毫米波雷达 ROS 驱动下载到Ubuntu18.04系统中,如需获取此代码请点击此链接根据教程下载即可。
代码下载链接:TI IWR6843ISK ROS驱动程序搭建-CSDN博客
问题1:
编译时出现没有 turtlebot_msgs 安装包的提示
解决方案:
将下面链接中的代码克隆或者下载zip文件到autonomous_robotics_ros/src/turtlebot/文件夹下
git clone https://github.com/turtlebot/turtlebot_msgs.git将此 turtlebot_msgs 安装包克隆或者下载到autonomous_robotics_ros/src/turtlebot/文件夹下之后,再次执行 catkin_make 指令编译即可。
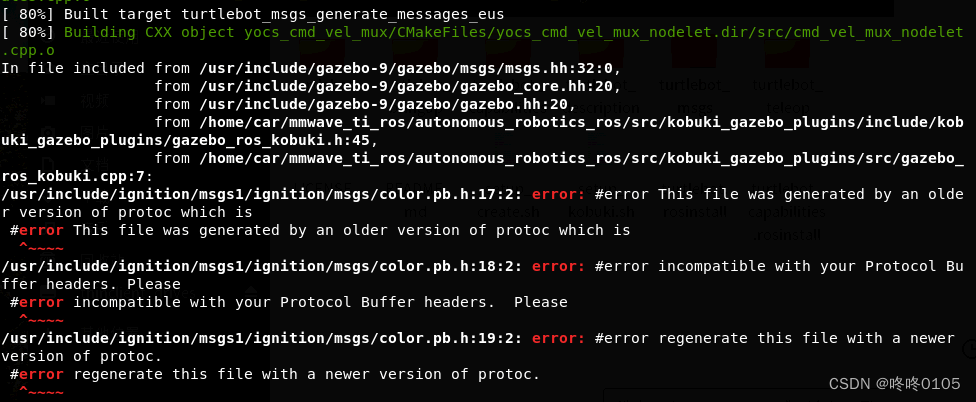
问题2:
#error This file was generated by an older version of protoc which is:
解决方法:
上述的问题主要是
error This file was generated by an older version of protoc which is:错误此文件是由旧版本的protoc生成的,我目前的版本为3.4.0,因此需要下载新版本的protoc才行。因为我的系统是Ubuntu18.04,此本版的gazebo对应的protoc版本为protoc 3.0.0.
根据如下步骤进行操作更新protoc文件
1)查看protoc文件版本
protoc --version
2)首先移除原有的 protobuf
cd /usr/local/include/google sudo rm -rf protobuf
3)下载protobuf文件,因为我自己的是protobuf 3.4.0,我这里就先下载了protobuf-v3.0.0
,按照所有步骤操作完成之后,如果还报版本不对的错误,说明这个v3.0.0 版本不对,需要根据下载更新的版本或者更旧的版本~~)
# 进入mmwave_ti_ros/autonomous_robotics_ros/src/文件下 cd mmwave_ti_ros/autonomous_robotics_ros/src/turtlebot/# 克隆 protobuf v3.0.0 文件 git clone https://github.com/protocolbuffers/protobuf/tree/v3.0.0下载完成后,执行如下操作编译 protobuf 3.0.0 文件,先进行自动配置,然后当前路径下会生成一个configure文件,指定安装路径
cd protobuf-3.0.0 ./autogen.sh ./configure make make check sudo make install sudo ldconfig至此 protobuf 3.0.0 安装完成,可以使用如下指令进行查询
protoc --version
注意:执行
./autogen.sh时,如果出现下面的问题:~/third_library/protobuf-3.0.0$ ./autogen.sh Google Mock not present. Fetching gmock-1.7.0 from the web...% Total % Received % Xferd Average Speed Time Time Time CurrentDload Upload Total Spent Left Speed0 0 0 0 0 0 0 0 --:--:-- 0:02:09 --:--:-- 0curl: (7) Failed to connect to googlemock.googlecode.com port 443: 连接超时解决方法是之间通过下载gmock 这个文件 ,链接:paulsapps/gmock-1.7.0首页 - GitCode,然后放到 protobuf-3.0.0/ 文件夹下,并且 将文件夹 gmock-1.7.0/改名为 gmock/ ,然后再次执行 ./autogen.sh 指令即可。



到此,protobuf问题已解决,在执行 catkin_make 指令编译之前,需要将刚刚下载的autonomous_robotics_ros/src/turtlebot/ protobuf-3.0.0/文件夹删除,然后再执行 catkin_make 指令编译,不然编译不了。
参考博客:
Turtlebot1入门教程-安装Turtlebot(Ubuntu18.04+Melodic)_sudo apt-get install ros-melodic-kobuki-CSDN博客
error This file was generated by an xxx version of protoc which is 解决方法_error: #error this file was generated by an older -CSDN博客
Ubuntu 18.04 安装protobuf --- version 3.20.3_protobuf 3.20-CSDN博客
Gazebo需要的protoc版本与google-cartographer需要的版本不一致_protobuf 哪个版本与 gazebo 9 兼容-CSDN博客
This file was generated by an older version of protoc 解决方法_windows下#error: this file was generated by an olde-CSDN博客
这篇关于Ubuntu18.04 中编译 TI 官方的ros驱动包中 autonomous_robotics_ros 包所存在的问题及解决方案的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






