本文主要是介绍七、VINS-mono 代码解析——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 紧耦合后端非线性优化系统框架
- 一、VIO中的状态向量与代价函数
- 1、需要优化的状态向量:
- 2、目标函数为:
- 二、视觉约束
- 1.视觉重投影误差residual
- 2、优化变量
- 3、Jacobian
- 4、协方差
- 三、IMU约束
- 1、残差:
- 2、优化变量:
- 3、IMU测量残差公式推导
- 4、残差对状态量的Jacobian
- 5、残差对状态量的协方差
- 四、基于舒尔补的边缘化
- 1、论文部分
- 2、基本公式
- 3、舒尔补
- 4、marg后形成的先验
- 5 具体例子
- 5.1之前的信息矩阵H的构成
- 5.2 舒尔补后形成新的信息矩阵new_H,并构造为先验
- 5.3 新测量信息和先验构成新的系统
前言
本文主要对紧耦合后端非线性优化的理论进行了详细的推导。主要借鉴了{VINS-Mono理论学习——后端非线性优化,VINS-Mono 理论详细解读——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化},
并参考了崔博的《VINS论文推导与代码解析》、深蓝学院的VIO课程内容。主要想对目标函数中视觉残差和IMU残差,以及对应的雅可比、协方差进行推导。}等资源。
紧耦合后端非线性优化系统框架

一、VIO中的状态向量与代价函数

1、需要优化的状态向量:
状态向量包括滑动窗口内的所有相机状态(位置P、旋转Q、速度V、加速度偏置ba、陀螺仪偏置bw)、相机到IMU的外参、所有3D点的逆深度:
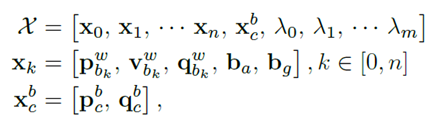
第一个式子是滑动窗口内所有状态量,n是关键帧数量,m是滑动窗内所有观测到的路标点总数,维度是15*n+6+m。特征点逆深度为了满足高斯系统。第二个式子xk是在第k帧图像捕获到的IMU状态,包括位置,速度,旋转(PVQ)和加速度偏置,陀螺仪偏置。第三个式子是相机外参。注意:xk只与IMU项和Marg有关;特征点深度也只与camera和Marg有关;
2、目标函数为:

视觉惯性BA:这三项依次为边缘化的先验信息、IMU的测量残差、视觉的重投影误差
BA优化模型分为三部分:
1、Marg边缘化残差部分(滑动窗口中去掉位姿和特征点约束)代码中使用Google开源的Ceres solver解决。
2、IMU残差部分(滑动窗口中相邻帧间的IMU产生)
3、视觉误差函数部分(滑动窗口中特征点在相机下视觉重投影残差)

二、视觉约束
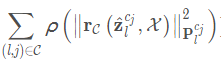
这部分要拟合的目标可以通过重投影误差约束,求解的是对同
这篇关于七、VINS-mono 代码解析——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






