本文主要是介绍Ros-kinetic学习Moveit!配置小结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ros-kinetic 的Moveit!教程网上并不多,但与indigo的配置方法类似。
首先,安装Moveit!
sudo apt-get install ros-kinetic-moveit
source /opt/ros/kinetic/setup.bash安装pr2相关文件
sudo apt-get install ros-kinetic-pr2-common打开Moveit!设置助手
roslaunch moveit_setup_assistant setup_assistant.launch选择创建新的moveit配置包 点击Create New MoveIt! Configuration Package
检索至下载好的pr2.urdf.xacro 文件(/opt/ros/kinetic/share/pr2_description/robots/pr2.urdf.xacro)
点击load files

生成碰撞免检矩阵 点击左边的Self-Collisions

再点击Regenerate Collision Matrix按钮,过一会在表格栏获得数据, 效果如下:

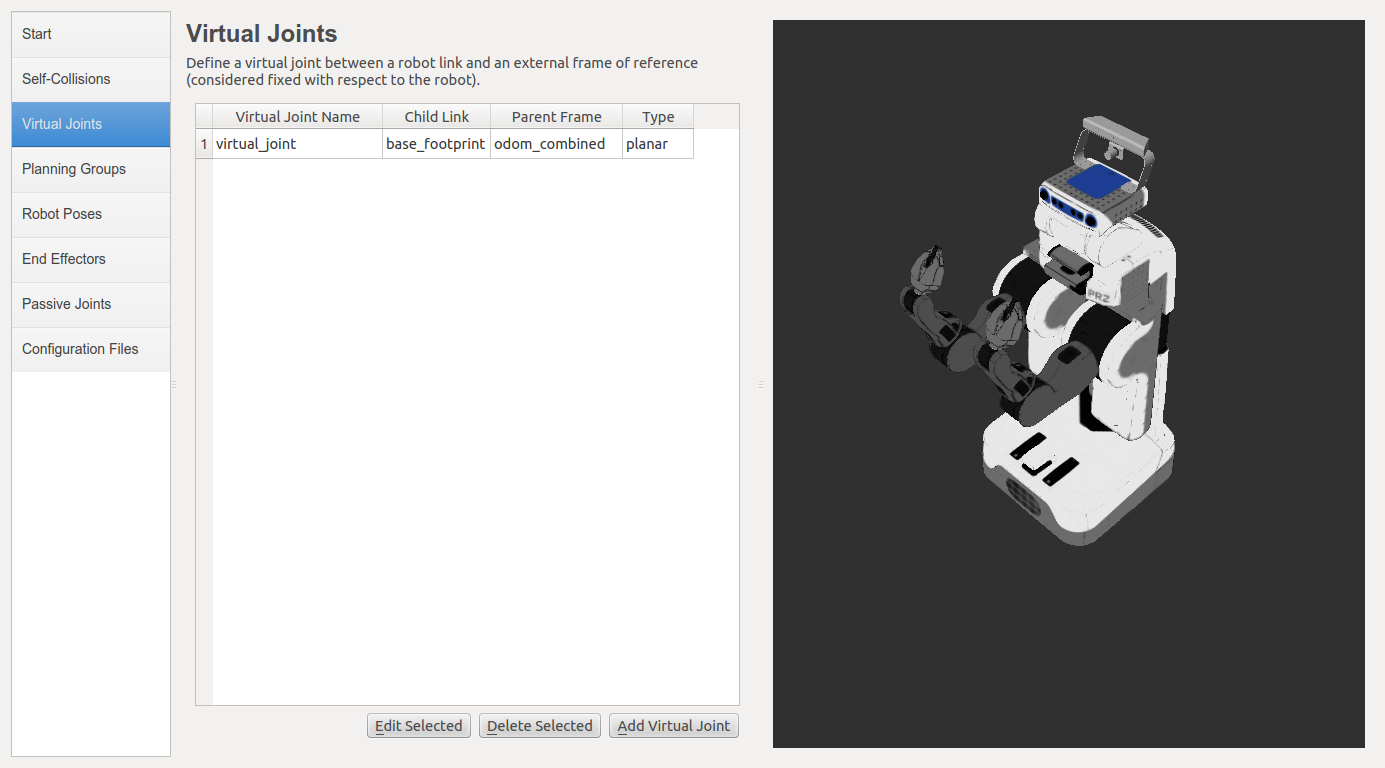
- 虚拟关节主要用于将机器人连接到世界上。
- 我们将为PR2定义了一个虚拟节点连接PR2的base_footprint和odom_combined世界框架。
- 这个虚拟的关节表示在一个平面上的机器人基座的运动。
- 添加步骤:
- 点击左边的Virtual Joints ,再点击右下角的Add Virtual Joint
- 设置节点名为“virtual_joint”
- 设置子link为“base_footprint”和父参考系为“odom_combined”.
- 设置Joint类型为“planar”.
- 点击保存,效果如下:
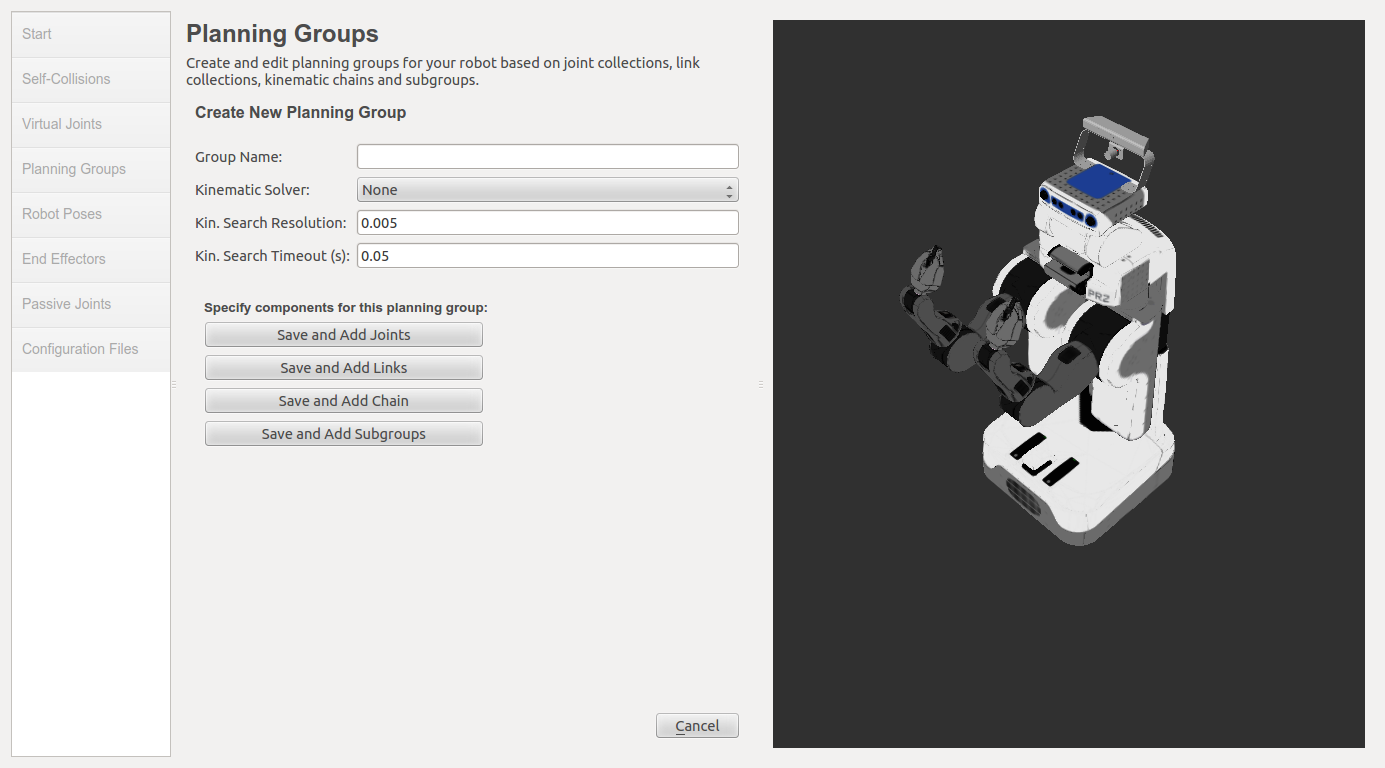
 增加规划组群
增加规划组群- 规划组用于在语义上描述你的机器人的不同部分,如定义一个手臂是什么,或一个末端执行器。
添加步骤:
点击左边的Planning Groups
点击Add Group,效果如下:
增加右臂
输入Group名为right_arm
选择 kdl_kinematics_plugin/KDLKinematicsPlugin 作为运动学求解
注意: 如果你有自定义机器人和想更强大的自定义IK求解,查看Kinematics/IKFast
保持Kin. Search Resolution和Kin. Search Timeout 为默认值.
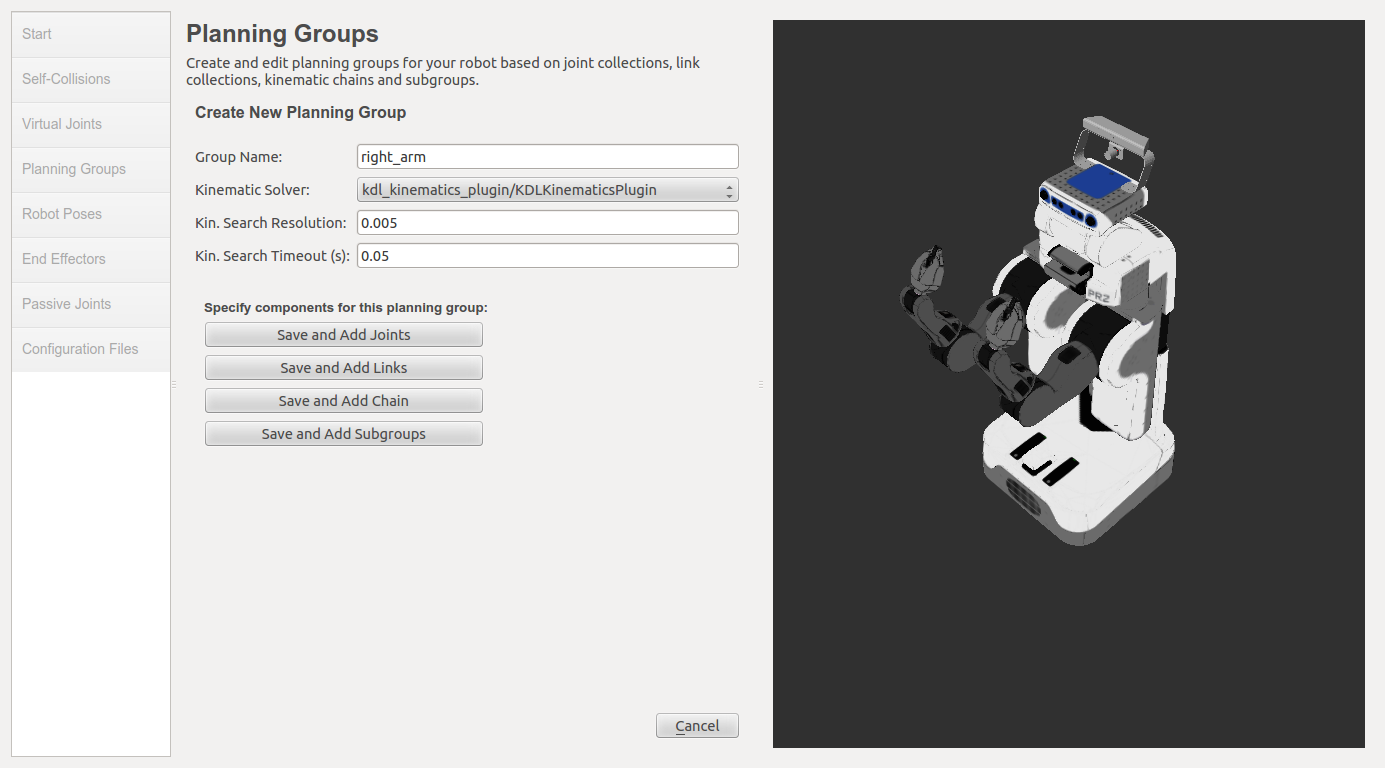
点击Save and Add Joints按钮
获得一个关节列表,需要从左边选择合适的关节,增加到右边的关节列表。左边按住选择从r_shoulder_pan_joint到r_wrist_roll_joint。点击>按钮,增加到右边。如图:
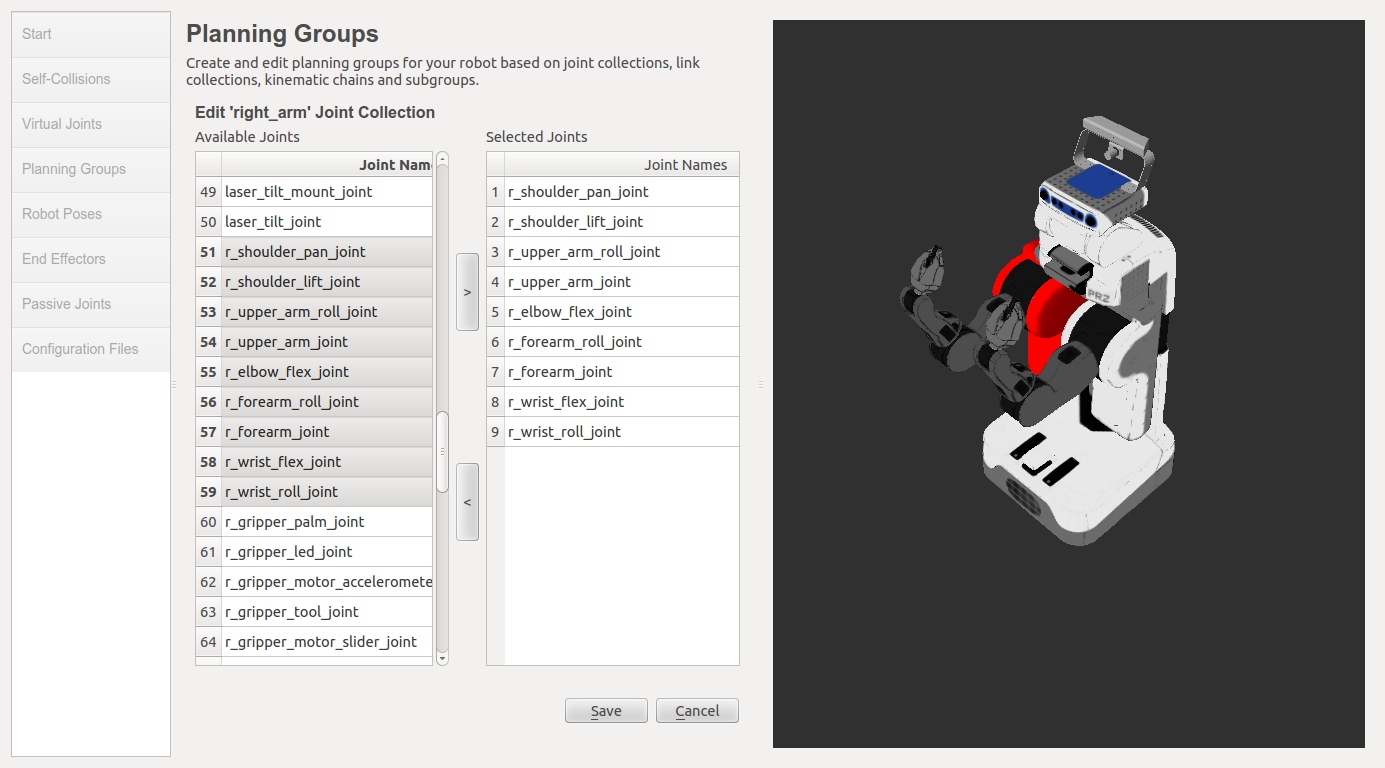
点击Save按钮,保存已经选择的组。保存后效果图:
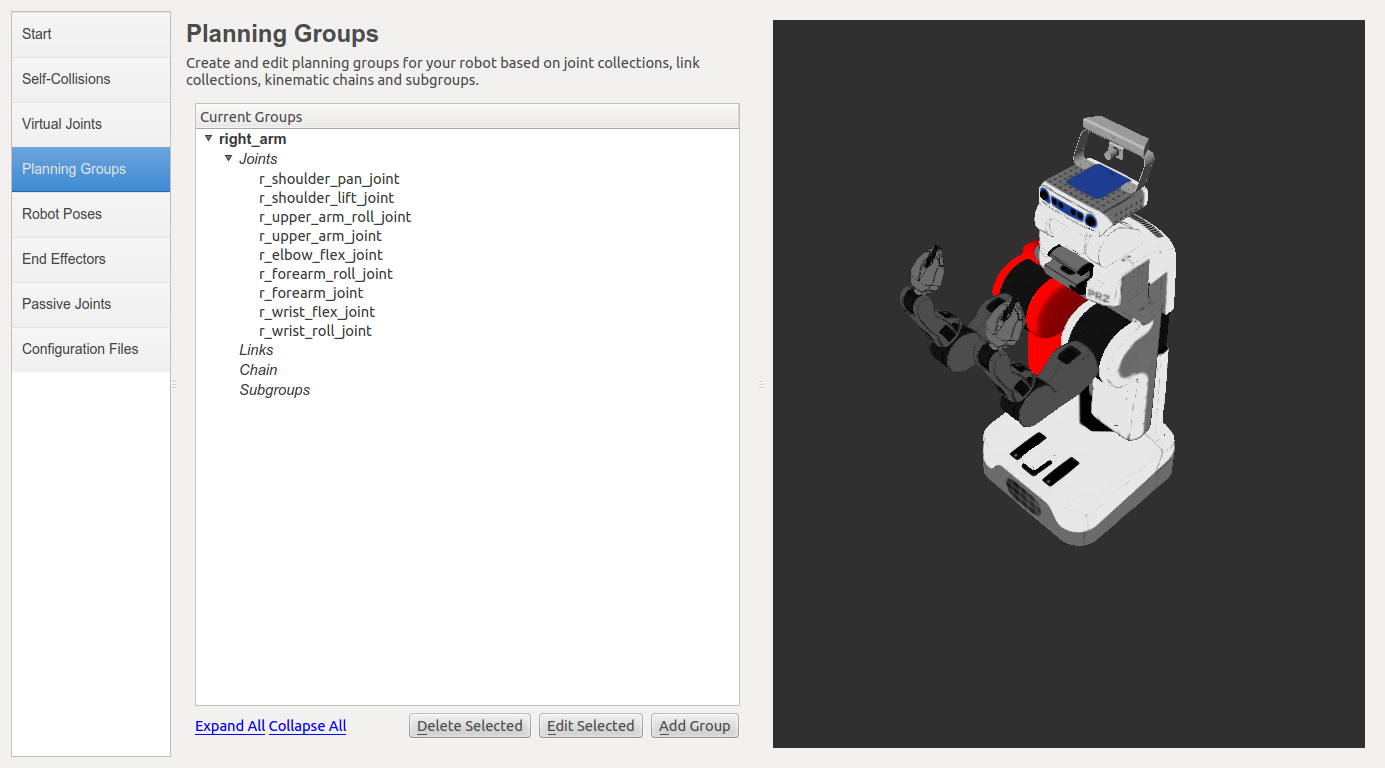
注意:PR2每个臂的只有7个关节,但在这里我们增加了9关节。一些关节(r_upper_arm_joint and r_forearm_joint)是固定的关节,不会被用于规划或运动学处理。
增加左臂
增加左臂类似右臂,选择从l_shoulder_pan_joint到the l_wrist_roll_joint.
增加抓手
我们将增加两组,左端和右端的末端执行器。跟增加手臂的流程不太一样。
点击 Add Group 按钮
输入组名为right_gripper
保持Kin. Search Resolution and Kin. Search Timeout 为默认值
点击Save and Add Links按钮
选择所有r_gripper相关的Links,增加到Selected Links。
点击Save
在左臂重复相同操作。这次选择left_gripper。增加后效果如下:
增加机器人的姿态
- 配置助手允许你添加固定的姿态到配置文件
- 这有一定作用,比如,你添加机器人到家里的某个位置。
- 点击Robot Poses按钮
- 点击Add Pose按钮,选择Pose名,默认值为中间值。你可以选择合适的位置,点击Save。
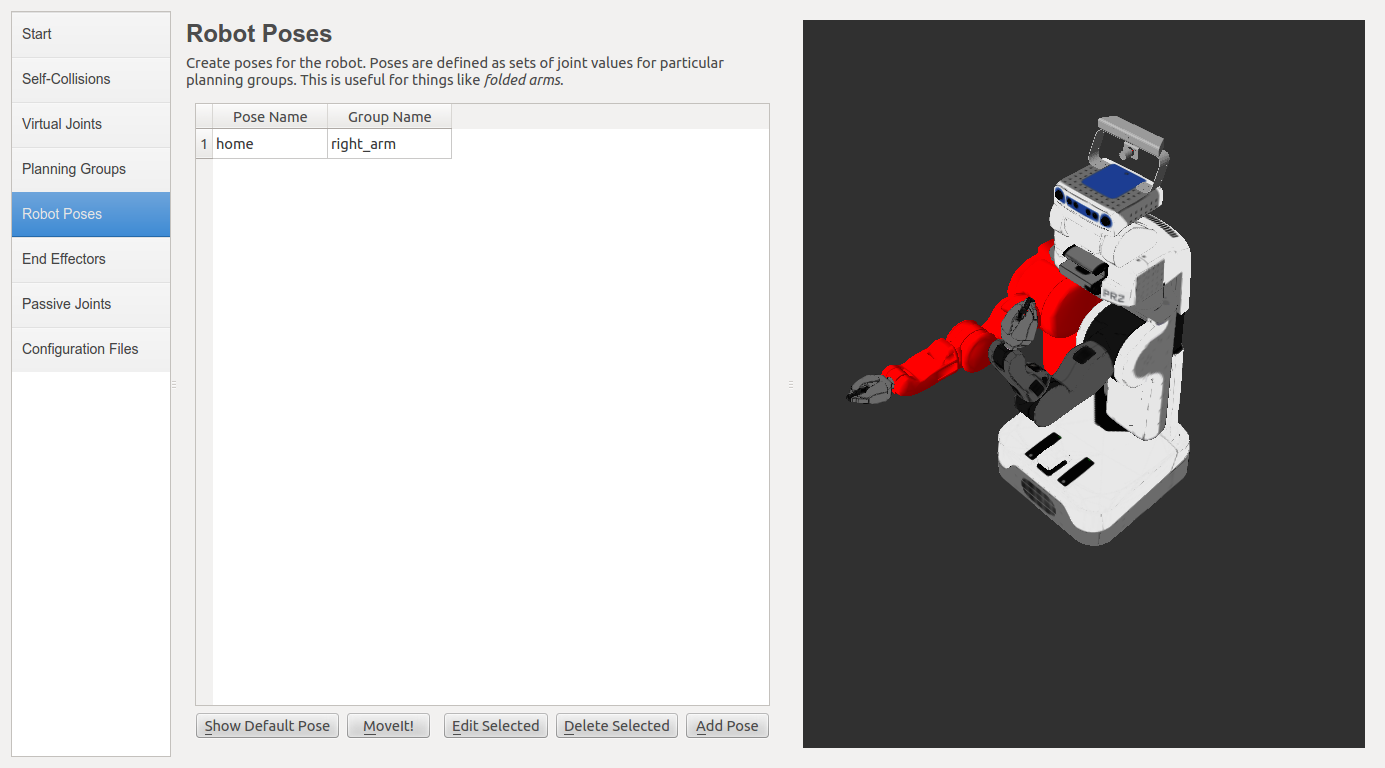
- 注意:姿势是如何关联特定的组。你可以为每个组保存独立的姿势。
- 重要提示:尝试移动所有的关节转动一圈。如果在你的URDF设置的限制有错误,你应该能够在这里看到。
- 标签末端执行器
- 你已经增加PR2的左右的抓手. 现在我们指定这两个组为特定的组end-effectors,这允许内部执行一些特别的操作
增加步骤:
- 点击End Effectors, 在点击Add End-Effectors.。
- 选择right_eef作为right抓手的End-Effectors的名称
- 选择right_gripper 作为End Effector Group
- 选择r_wrist_roll_link 作为end-effector的Parent Link
- 保留Parent Group空白.效果如下:
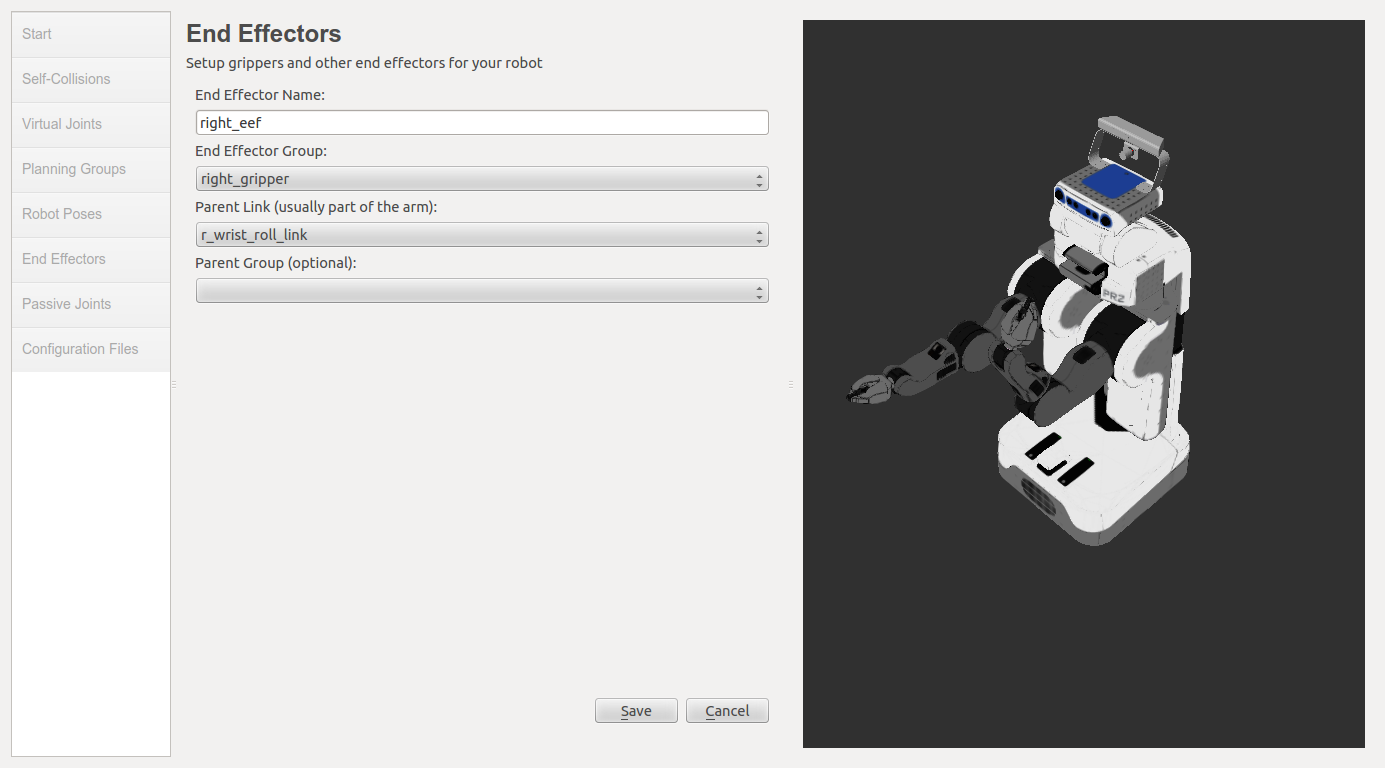
- 点击Save
- 类似的增加left_eef
- 添加被动关节
- 被动关节标签意味着允许任何存在于机器人的被动关节的规范
- 这告诉规划者不能规划这些被动节点。
- 被动关节的例子包括被动脚轮
- PR2没有被动关节,所以我们将跳过这一步。
- 生成配置文件
- 最后一步生成能运行MoveIt!的配置文件
增加步骤:
- 点击Configuration Files,点击browse选择一个合适的位置,输入配置名。(例如在Home目录创建一个新目录pr2_moveit_config)
- 点击 Generate Package ,会生成一系列的launch和配置文件。所有的文件显示在Generated Files/Folders列表。
- 效果图:
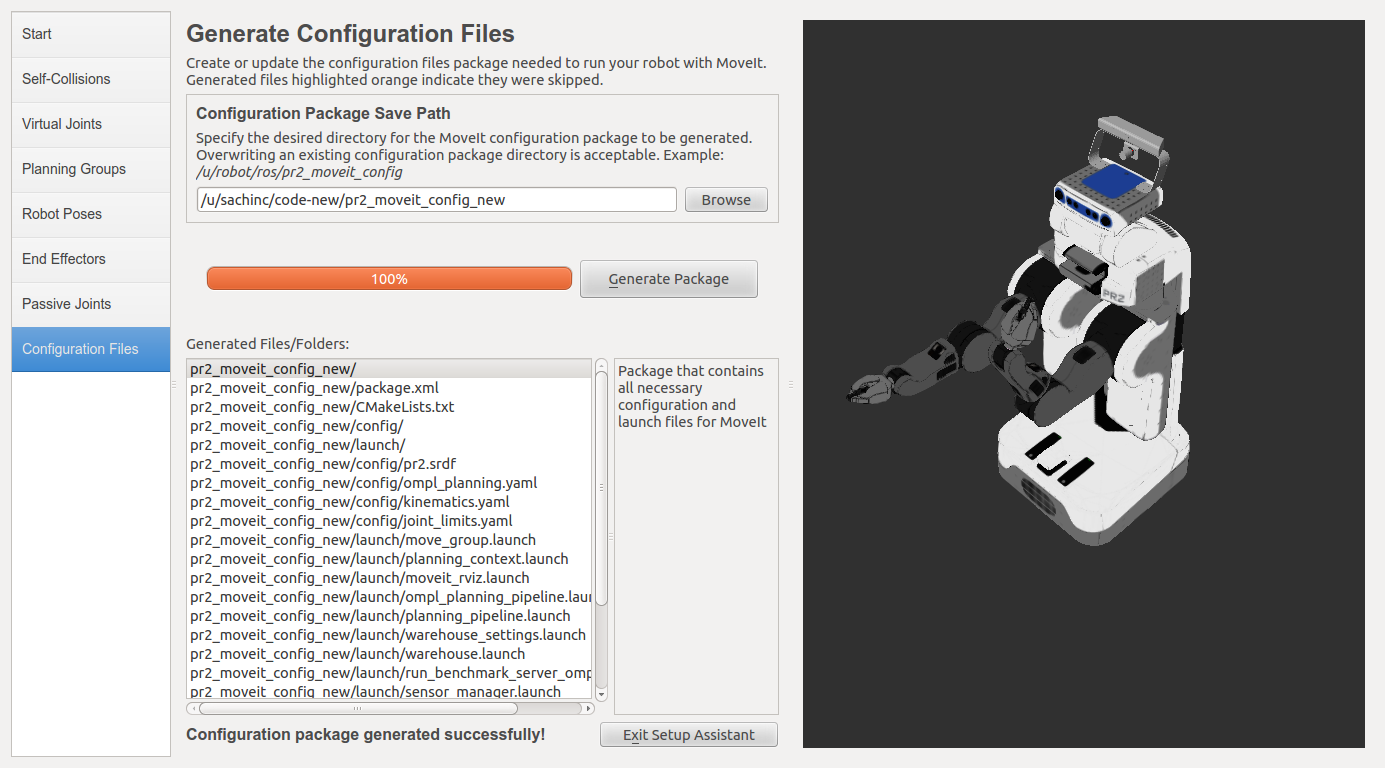
- 恭喜,至此配置完成

当然也可直接跳过上述配置步骤
下载pr2_moveit_config包,然后编译
git clone https://github.com/davetcoleman/pr2_moveit_config.gitsudo apt-get install ros-kinetic-moveit-pr2roslaunch pr2_moveit_config demo.launch
在kinetic版本里的Moveit!已将Rviz配置好了,直接就可以按住左键直接拖动pr2的机械臂进行模拟了。
在Planning Request里的Planning Group里选择要规划的运动组。
在Motion Planning 的Planning选项卡中点击Plan and Execute来显示模拟运动的路径。
这篇关于Ros-kinetic学习Moveit!配置小结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




