本文主要是介绍STM32实战总结:HAL之GPRS,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关于无线传输的基础知识,参考:
无线通信技术概览_路溪非溪的博客-CSDN博客
和wifi一样,GPRS现在也基本上是使用模组。不过GPRS不用和WiFi一样要输入SSID和密码,开机就会自动联网,所以使用起来更方便一些。但是GPRS要有手机卡,流量是要钱的。
GRPS的天线通常是外置的。
关于天线可参考:物联网天线|IoT天线|GPS天线|WiFi天线- 德宝通信


SIM8000C
SIM800C是一款四频GSM/GPRS模块,支持高达85.6kbps的GPRS数据传输。它具有强大的扩展能力和丰富的接口,包括UART、USB2.0、GPIO等。该模块为客户的应用提供了极大的灵活性和易于集成的能力。
更多参考:SIM800C
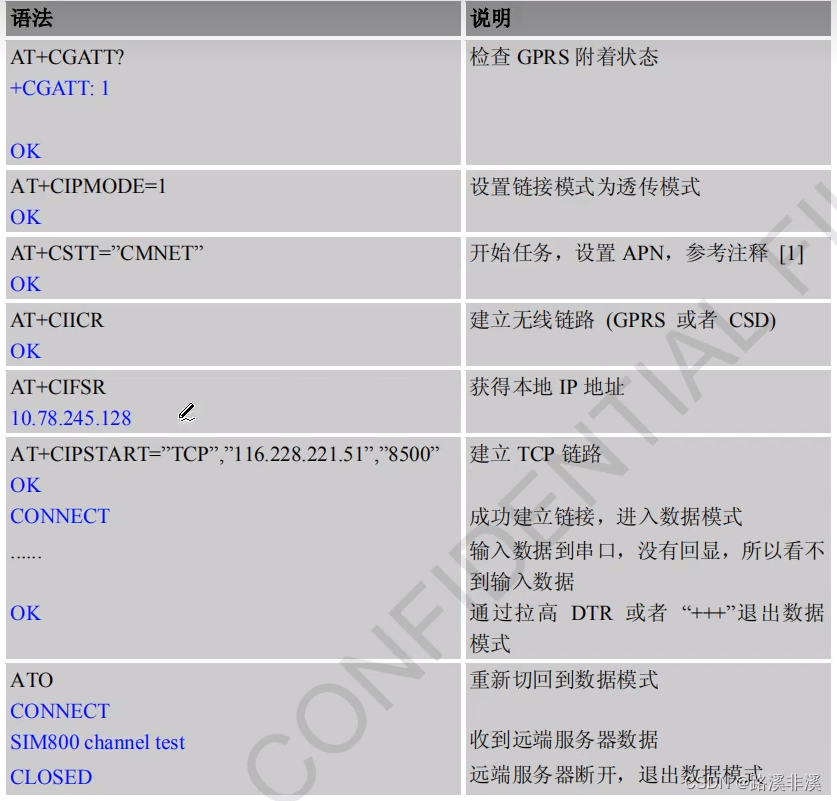
AT指令示例:
更多详细内容查看厂家给的模组使用手册,此处不再赘述。
关键代码
/* Includes ------------------------------------------------------------------*/ #include "MyApplication.h"/* Private define-------------------------------------------------------------*/ #define TCP_Server (uint8_t*)"AT+CIPSTART=\"TCP\",\"115.29.109.104\",6511\r\n" //Doit.am远程信息转发服务/* Private variables----------------------------------------------------------*/ static uint8_t SIM800C_Connect_Error_Flag = FALSE; //SIM800C联网错误标志位/* Private function prototypes------------------------------------------------*/ static void StartUp(void); //启动SIM800C static void TCP_Connect_Server(void); //通过TCP连接服务器 static void Transfer_SHT30(void); //传送SHT30的温湿度 static void Receive_Information(void); //接收信息 static void DMA_Receive_Set(void); //DMA重新设置 static void Error(void); //错误信息//内部函数 static void SendAT(uint8_t *,uint8_t *); //发送AT指令static void Moudle_Sync_Baud(void); //同步波特率 static void Moudle_Check_SIM_Status(void); //检查SIM卡状态 static void Moudle_Check_Network_Register(void); //检查网络注册 static void Moudle_Check_Attach_GPRS_Service(void); //检查粘附GPRS网络 static void Moudle_BringUp_Wireless_Connect(void); //建立无线链接 static void Moudle_StartUp_TCP_Connect(void); //开始TCP连接/* Public variables-----------------------------------------------------------*/ SIM800C_t SIM800C = {FALSE,TIMER6_10S,StartUp,TCP_Connect_Server,Transfer_SHT30,Receive_Information,DMA_Receive_Set,Error };/** @name StartUp* @brief 启动SIM800C* @param None* @retval None */ static void StartUp() {//如果模块处于开机状态,先关机if(READ_GPRS_STATUS == GPIO_PIN_SET){printf("The module of SIM800C shutdown!\r\n");//模块关机SET_GPRS_PWRKEY;HAL_Delay(1000);HAL_Delay(1000);HAL_Delay(1000);CLR_GPRS_PWRKEY;//等待模块关机完成Timer6.usDelay_Timer = 0;while(READ_GPRS_STATUS == GPIO_PIN_SET){if(Timer6.usMCU_Run_Timer >= TIMER6_10S){SIM800C.Error();break;}}//按手册提示,关机后迅速重启模块,至少延时800msHAL_Delay(1000);}//如果模块处于关机状态,进行开机if(READ_GPRS_STATUS == GPIO_PIN_RESET){printf("The module of SIM800C startup!\r\n");//模块开机SET_GPRS_PWRKEY;HAL_Delay(1000);HAL_Delay(1000);CLR_GPRS_PWRKEY;//等待模块开机完成Timer6.usDelay_Timer = 0;while(READ_GPRS_STATUS == GPIO_PIN_RESET){if(Timer6.usMCU_Run_Timer >= TIMER6_10S){SIM800C.Error();break;}}} }/** @name SendAT* @brief 发送AT指令* @param AT_Command -> 待发送的AT指令Respond_Str -> 回应数据中包含的字符串* @retval None */ static void SendAT(uint8_t * AT_Command,uint8_t * Respond_Str) {uint8_t* const Ptr_AT_Command = AT_Command;uint8_t* const Ptr_Respond_Str = Respond_Str;//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(Ptr_AT_Command); //打印信息printf("%s",Ptr_AT_Command);//等待模块回应数据,超时错误处理Timer6.usDelay_Timer = 0;while(strstr((const char*)UART2.pucRec_Buffer,"\r\n") == NULL){if(Timer6.usDelay_Timer > TIMER6_100mS){SIM800C.Error();break;}}//延时10ms,接收完全部字节HAL_Delay(10);//模块回应数据处理处理if(strstr((const char*)UART2.pucRec_Buffer,(const char*)Ptr_Respond_Str) == NULL){SIM800C.Error();}//打印信息printf("%s",UART2.pucRec_Buffer); }/** @name TCP_Connect_Server* @brief 通过TCP连接服务器* @param None* @retval None */ static void TCP_Connect_Server() {__HAL_UART_DISABLE_IT(&huart2,UART_IT_IDLE); //禁止串口2的空闲中断SIM800C.StartUp(); //启动GPRS模块Moudle_Sync_Baud(); //同步波特率SendAT(AT_CMD_ECHO_OFF,(uint8_t*)"OK"); //关闭回显Moudle_Check_SIM_Status(); //检查SIM卡状态SendAT(AT_CMD_CCID,(uint8_t*)"OK"); //显示ICCIDMoudle_Check_Network_Register(); //检查网络注册Moudle_Check_Attach_GPRS_Service(); //检查粘附GPRS网络SendAT(AT_CMD_CIPMODE,(uint8_t*)"OK"); //设置为透传模式SendAT(AT_CMD_CSTT,(uint8_t*)"OK"); //开始任务,设置APNMoudle_BringUp_Wireless_Connect(); //建立无线链接SendAT(AT_CMD_CIFSR,(uint8_t*)"."); //获取本地IP地址Moudle_StartUp_TCP_Connect(); //开始TCP连接SIM800C.DMA_Receive_Set(); //DMA重新接收设置,开始接收TCP服务器的指令if(SIM800C.TCP_Connect_Status == TRUE)__HAL_UART_ENABLE_IT(&huart2,UART_IT_IDLE); //使能串口2的空闲中断 }/** @name Moudle_Sync_Baud* @brief 同步波特率* @param None * @retval None */ static void Moudle_Sync_Baud() {SIM800C_Connect_Error_Flag = FALSE;LED.LED_OFF(LED2);LED.LED_OFF(LED3);HAL_GPIO_WritePin(OUT_NPN_GPIO_Port,OUT_NPN_Pin,GPIO_PIN_RESET);Timer6.usDelay_Timer = 0;do{//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(AT_CMD_AT);//打印信息printf("%s",AT_CMD_AT);//延时100ms,等待接收完成HAL_Delay(100);//打印信息printf("%s",UART2.pucRec_Buffer);//超时处理if(Timer6.usDelay_Timer >= TIMER6_10S){SIM800C.Error();break;}}while(strstr((const char*)UART2.pucRec_Buffer,"OK") == NULL); } /** @name Moudle_Check_SIM_Status* @brief 检查SIM卡状态* @param None * @retval None */ static void Moudle_Check_SIM_Status() {if(SIM800C_Connect_Error_Flag == FALSE){Timer6.usDelay_Timer = 0;do{//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(AT_CMD_CPIN);//打印信息printf("%s",AT_CMD_CPIN);//延时1000ms,等待接收完成HAL_Delay(1000);//打印信息printf("%s",UART2.pucRec_Buffer);//超时处理if(Timer6.usDelay_Timer >= TIMER6_10S){SIM800C.Error();break;}}while(strstr((const char*)UART2.pucRec_Buffer,"OK") == NULL);} }/** @name Moudle_Check_Network_Register* @brief 检查网络注册* @param None * @retval None */ static void Moudle_Check_Network_Register() {if(SIM800C_Connect_Error_Flag == FALSE){Timer6.usDelay_Timer = 0;while(1){//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(AT_CMD_CREG);//打印信息printf("%s",AT_CMD_CREG);//延时100ms,等待接收完成HAL_Delay(100); //打印信息printf("%s",UART2.pucRec_Buffer);//判断注册if((strstr((const char*)UART2.pucRec_Buffer,",1") != NULL) || (strstr((const char*)UART2.pucRec_Buffer,",5") != NULL)){break;}else{HAL_Delay(1000);HAL_Delay(1000);}//超时处理if(Timer6.usDelay_Timer >= TIMER6_2min){SIM800C.Error();break;}}} }/** @name Moudle_Check_Attach_GPRS_Service* @brief 建立无线链接* @param None * @retval None */ static void Moudle_Check_Attach_GPRS_Service() {if(SIM800C_Connect_Error_Flag == FALSE){Timer6.usDelay_Timer = 0;while(1){//输出信号强度SendAT(AT_CMD_CSQ,(uint8_t*)"OK");//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(AT_CMD_CGATT);//打印信息printf("%s",AT_CMD_CGATT);//延时100ms,等待接收完成HAL_Delay(100); //打印信息printf("%s",UART2.pucRec_Buffer);//判断注册if(strstr((const char*)UART2.pucRec_Buffer,"+CGATT: 1") != NULL){break;}else{HAL_Delay(1000);HAL_Delay(1000);}//超时处理if(Timer6.usDelay_Timer >= TIMER6_2min){SIM800C.Error();break;}}} }/** @name Moudle_BringUp_Wireless_Connect* @brief 建立无线链接* @param None * @retval None */ static void Moudle_BringUp_Wireless_Connect() {if(SIM800C_Connect_Error_Flag == FALSE){Timer6.usDelay_Timer = 0;while(1){//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(AT_CMD_CIICR);//打印信息printf("%s",AT_CMD_CIICR);//延时100ms,等待接收完成HAL_Delay(100); //打印信息printf("%s",UART2.pucRec_Buffer);//建立无线链接成功if(strstr((const char*)UART2.pucRec_Buffer,"OK") != NULL){LED.LED_ON(LED2);break;}//建立无线链接失败if(strstr((const char*)UART2.pucRec_Buffer,"ERROR") != NULL){SIM800C.Error();break;}//超时处理if(Timer6.usDelay_Timer >= TIMER6_85S){SIM800C.Error();break;}}} }/** @name Moudle_StartUp_TCP_Connect* @brief 开始TCP连接* @param None * @retval None */ static void Moudle_StartUp_TCP_Connect() {if(SIM800C_Connect_Error_Flag == FALSE){printf("Connect TCP Server!\r\n");Timer6.usDelay_Timer = 0;while(1){//DMA重新接收设置SIM800C.DMA_Receive_Set();//发送AT指令UART2.SendString(TCP_Server);//打印信息printf("%s",TCP_Server);//等待模块返回数据while(Timer6.usDelay_Timer < TIMER6_160S){if((strstr((const char*)UART2.pucRec_Buffer,"CONNECT") != NULL) | (strstr((const char*)UART2.pucRec_Buffer,"FAIL") != NULL)){break;}} //延时100ms,等待接收完成HAL_Delay(100);//打印信息printf("%s",UART2.pucRec_Buffer);//TCP服务器链接失败if(strstr((const char*)UART2.pucRec_Buffer,"FAIL") != NULL){printf("Connect TCP Server Failure!\r\n");SIM800C.TCP_Reconnect_Timer = 0;SIM800C.Error();break;}//TCP服务器链接成功if(strstr((const char*)UART2.pucRec_Buffer,"CONNECT") != NULL){printf("Connect TCP Server Success!\r\n");SIM800C.TCP_Connect_Status = TRUE;SIM800C.TCP_Reconnect_Timer = 0;LED.LED_ON(LED3);break;}//超时处理if(Timer6.usDelay_Timer >= TIMER6_160S){SIM800C.TCP_Reconnect_Timer = 0;SIM800C.Error();break;}}} }/** @name Transfer_SHT30* @brief 传送SHT30的温湿度* @param NONE* @retval None */ static void Transfer_SHT30() {float Temp_float = 0;uint16_t Temp_uint16 = 0;//温度值 -40至125℃,精度0.1℃if(SHT30.fTemperature < 0){Temp_float = 0 - SHT30.fTemperature;*(UART2.pucSend_Buffer + 0) = '-';}else{Temp_float = SHT30.fTemperature;*(UART2.pucSend_Buffer + 0) = ' ';}Temp_uint16 = (uint16_t)(Temp_float*10);if(Temp_uint16 < 10) //0.x{*(UART2.pucSend_Buffer + 1) = ' ';*(UART2.pucSend_Buffer + 2) = ' ';*(UART2.pucSend_Buffer + 3) = '0';*(UART2.pucSend_Buffer + 4) = '.';*(UART2.pucSend_Buffer + 5) = Temp_uint16 + '0';}else if(Temp_uint16 < 100)//x.x{*(UART2.pucSend_Buffer + 1) = ' ';*(UART2.pucSend_Buffer + 2) = ' ';*(UART2.pucSend_Buffer + 3) = Temp_uint16/10 + '0';*(UART2.pucSend_Buffer + 4) = '.';*(UART2.pucSend_Buffer + 5) = Temp_uint16%10 + '0';}else if(Temp_uint16 < 1000)//xx.x{*(UART2.pucSend_Buffer + 1) = ' ';*(UART2.pucSend_Buffer + 2) = Temp_uint16/100 + '0';*(UART2.pucSend_Buffer + 3) = Temp_uint16%100/10 + '0';*(UART2.pucSend_Buffer + 4) = '.';*(UART2.pucSend_Buffer + 5) = Temp_uint16%10 + '0';}else//xxx.x{*(UART2.pucSend_Buffer + 1) = Temp_uint16/1000 + '0';*(UART2.pucSend_Buffer + 2) = Temp_uint16%1000/100 + '0';*(UART2.pucSend_Buffer + 3) = Temp_uint16%100/10 + '0';*(UART2.pucSend_Buffer + 4) = '.';*(UART2.pucSend_Buffer + 5) = Temp_uint16%10 + '0';}//数据传送UART2.SendString((uint8_t *)"The Temperature of SHT30 is ");HAL_Delay(3); //延时,等待字符串发送完 时间 = (11*1000ms)/115200 * 28 = 2.68msUART2.SendArray(UART2.pucSend_Buffer,6);HAL_Delay(1); //延时,等待数组发送完 时间 = (11*1000ms)/115200 * 6 = 0.58msUART2.SendString((uint8_t *)"℃\r\n");HAL_Delay(1); //延时,等待字符串发送完 时间 = (11*1000ms)/115200 * 4 = 0.39ms//湿度值 0 - 100%RH,精度1%RHif(SHT30.ucHumidity < 10){*(UART2.pucSend_Buffer + 0) = ' ';*(UART2.pucSend_Buffer + 1) = SHT30.ucHumidity + '0';}else{*(UART2.pucSend_Buffer + 0) = SHT30.ucHumidity/10 + '0';*(UART2.pucSend_Buffer + 1) = SHT30.ucHumidity%10 + '0';}*(UART2.pucSend_Buffer + 2) = '%';*(UART2.pucSend_Buffer + 3) = 'R';*(UART2.pucSend_Buffer + 4) = 'H';//数据传送UART2.SendString((uint8_t *)"The Humidity of SHT30 is ");HAL_Delay(3); //延时,等待字符串发送完 时间 = (11*1000ms)/115200 * 25 = 2.39msUART2.SendArray(UART2.pucSend_Buffer,5); }/** @name Receive_Information* @brief 接收信息* @param None * @retval None */ static void Receive_Information() { if(SIM800C.TCP_Connect_Status == TRUE){printf("Received information from the TCP server\r\n");printf("%s",UART2.pucRec_Buffer);printf("\r\n");//切换继电器状态if(strstr((const char*)UART2.pucRec_Buffer,"Flip Relay") != NULL){Relay.Relay_Flip();}if(strstr((const char*)UART2.pucRec_Buffer,"Flip Buzzer") != NULL){if(Buzzer.Status == Buzzer_Status_OFF){Buzzer.ON();}else{Buzzer.OFF();}}//DMA重新接收设置,接收TCP服务器的新指令SIM800C.DMA_Receive_Set();} }/** @name DMA_Receive_Set* @brief DMA接收设置* @param None * @retval None */ static void DMA_Receive_Set(void) {//串口2禁止DMA接收HAL_UART_DMAStop(&huart2);//清缓存Public.Memory_Clr(UART2.pucRec_Buffer,strlen((const char*)UART2.pucRec_Buffer)); //串口2开启DMA接收HAL_UART_Receive_DMA(&huart2,UART2.pucRec_Buffer,UART2_Rec_LENGTH); }/** @name Error* @brief 错误信息* @param None * @retval None */ static void Error() {SIM800C_Connect_Error_Flag = TRUE;SIM800C.TCP_Reconnect_Timer = 0;HAL_GPIO_WritePin(OUT_NPN_GPIO_Port,OUT_NPN_Pin,GPIO_PIN_SET); } /*************************************End Of File *************************************/
这篇关于STM32实战总结:HAL之GPRS的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







