本文主要是介绍开放式高实时高性能PLC控制器解决方案-基于米尔电子STM32MP135,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
随着工业数字化进程加速与IT/OT深入融合,不断增加的OT核心数据已经逐步成为工业自动化行业的核心资产,而OT层数据具备高实时、高精度、冗余度高、数据量大等等特点,如何获取更加精准的OT数据对数字化进程起到至关重要的作用,同时随着国内工业控制系统逐步进入中高端应用,更加精准的控制至关重要,因此工业控制系统高实时高性能需求尤其突出。
面对以上挑战,合作伙伴翌控科技基于米尔STM32MP135开发板发布开放式高实时高性能PLC控制器解决方案,将高精准数据采集、预处理、存储、通信与高实时控制融为一体,为控制系统迈向完全数字化中高端控制提供一个非常好的选择。
STM32MP135处理器简介
STM32MP135系列处理器具备1GHz高主频,实现高性能的同时,具备更低的功耗,为工业控制产品稳定可靠的执行提供坚实的基础。同时STM32MP135支持高性能DDR3存储器,在存储器性能与抖动抑制方面实现极大的优化。
为了实现工业实时以太网EtherCAT与标准以太网TCP/IP通讯同时运行,STM32MP135设计了2个独立的高性能千兆以太网MAC单元,经过长时间验证,通讯效率与稳定性非常高,并且可以很好的适配国产千兆PHY芯片。
STM32MP135支持的Eclipse ThreadX实时操作系统,针对高实时高性能的应用场景,中断响应速度低至ns级,而非常高负载情况下ThreadX任务抖动依然可控制在10us以内,同时完备的HAL驱动库具备极速外设响应速度。对于熟悉STM32的开发工程师可实现零门槛升级至STM32MP135的开发。
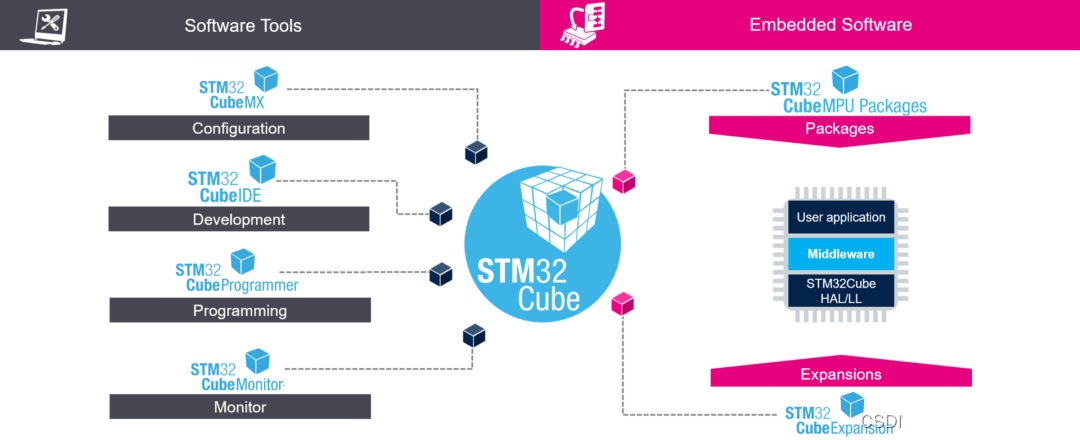
▲STM32CubeMPU MW overview

▲ Middleware Components
翌控科技LogicLab解决方案基于STM32MP135平台的实现
翌控科技和STM32联合开发,完成LogicLab解决方案对STM32MP135处理器的适配,包括符合IEC61131-3标准的PLC运行系统、Modbus协议栈、CANopen主站协议栈、EtherCAT主站协议栈、运动控制等等组件。
同时翌控科技对STM32MP135处理器的Eclipse ThreadX实时操作系统适配与BSP驱动进行了针对于PLC应用的增强。经过详细测试,基于STM32MP135平台LogicLab解决方案性能均达到先进水平,关键技术参数如下:
- PLC存储器:程序区: 16MB,数据区: 32MB,掉电保持区: 128KB
- PLC基础指令执行性能: 4ns
- PLC高速IO中断响应能力: <1us
- PLC中断任务响应能力: <10us
- EtherCAT主站推荐最小周期(开启DC): 250us(小于8从站),500us(小于16从站),1ms(小于32从站)
- EtherCAT任务与DC从站时间偏差: <10us
- 运动控制最大轴数:40轴(含脉冲轴与虚拟轴)
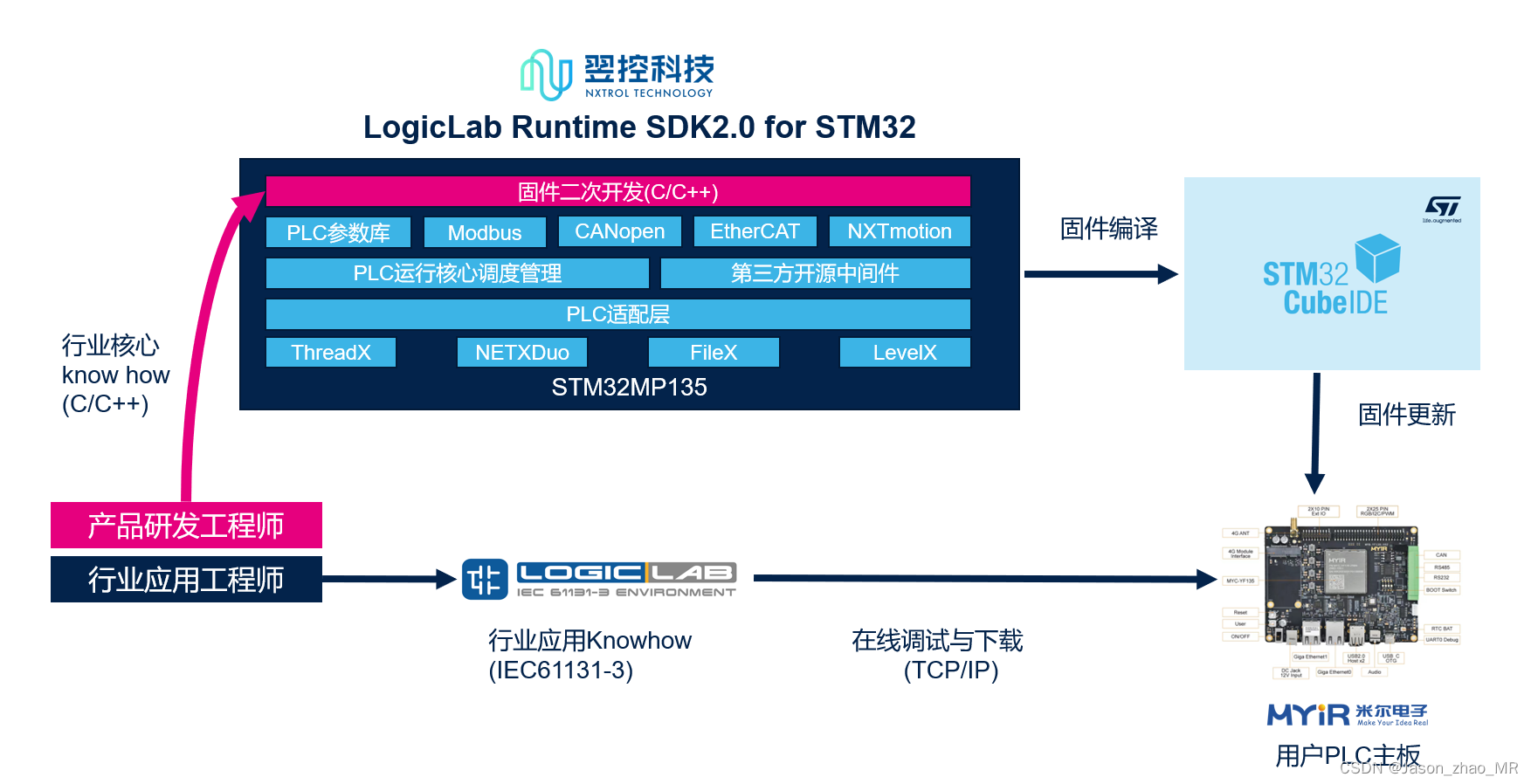
翌控科技LogicLab解决方案应用架构图:

翌控科技基于STM32系列处理器提供全新LogicLab Runtime SDK 2.0版本,基于标准开发板集成Eclipse ThreadX组件、板级驱动、PLC核心库移植、现场总线通讯库、运动控制库实现等等功能,实现开箱即用,大幅削减基础平台研发投入。LogicLab Runtime SDK可直接通过STM32CubeIDE导入工程,并进行编译并生成固件,同时可基于C/C++对PLC核心功能进行扩展,完全固化行业核心Knowhow,从而实现独特的PLC控制器产品,核心架构图如下:
开放式硬件生态
开放式高实时高性能PLC控制器产品的硬件生态,可以加速客户开发产品进度以及降低研发难度和风险。
通过与米尔电子深入合作,LogicLab Runtime SDK已适配米尔电子的MYD-YF135-4E512D-100-I开发板,该开发板采用核心板+底板分离式设计,工业级设计可快速进行产品化,具备2路千兆以太网接口同时适配以太网通讯(支持ModbusTCP通讯)与EtherCAT主站,1路RS485与1路RS232适配ModbusRTU接口,1路CAN总线适配CANopen主站,外扩RGB显示屏可进行图形化界面开发以及引出多路通用GPIO实现本地高速IO子系统,开发板图片如下:
结论
借助于STM32优秀的MPU产品与丰富的RTOS软件生态以及板级硬件伙伴米尔电子的工业级模组,翌控科技实现开放式高实时高性能PLC控制器解决方案,通过发布开放式LogicLab Runtime SDK软件包,用户可快速实现具备竞争力的PLC控制器产品,并且大幅降低了研发团队投入,为全面实现数字化智能化控制系统奠定坚实的基础。
这篇关于开放式高实时高性能PLC控制器解决方案-基于米尔电子STM32MP135的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



