本文主要是介绍noetic ros配置因时机械夹爪的驱动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
noetic ros配置因时机械夹爪的驱动文件
- 配置编译教程
- 解决方案
配置编译教程
1.inspire_robot 包支持因时机器人公司的机械夹爪在ROS平台上的使用,我们在ros noetic环境下进行了测试。
2.为了使程序能够正常运行,需要执行以下环境配置操作:(首次执行的需要,配置好了就不需要了)
1)安装ros-noetic环境,具体安装方式如下:
(1)配置Ubuntu的资源库(系统设置->软件和更新):“restricted”,“universe"和"multiverse”。
(2)设置Ubuntu的sources.list。终端指令:sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
(3)设置key。终端指令:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
然后输入指令
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
(4)安装。终端指令:sudo apt-get updatesudo apt-get install ros-noetic-desktop-full (5)初始化 rosdepc(鱼香ros)。终端指令:sudo rosdepc initrosdepc update(6)配置环境。终端指令:echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc(7)安装build依赖。终端指令:sudo apt-get install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential2)创建catkin工作目录终端指令:mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspacecd ~/catkin_ws/catkin_makesource devel/setup.bash (在每一个终端启动时使用,帮助你找到ROS安装目录)
3)将inspire_robot.zip 放到catkin_ws目录下的/src文件夹下,解压终端指令:cd ~/catkin_ws/srcunzip inspire_robot
4) 安装本安装包所需要的依赖终端指令:cd ~/catkin_wsrosdepc install --from-paths src --ignore-src --rosdistro=noetic -y
5)对安装包进行重新编译终端指令:catkin_make注意:该指令编译会报错,如下所示
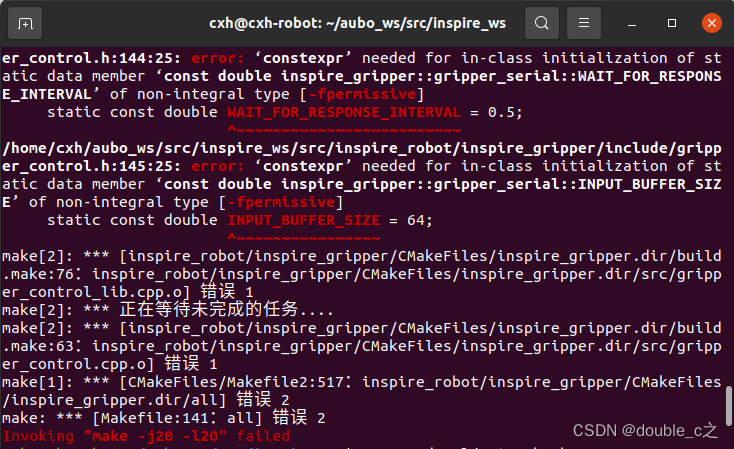
解决方案
按着如图所示,在对应文件添加constexpr修饰符
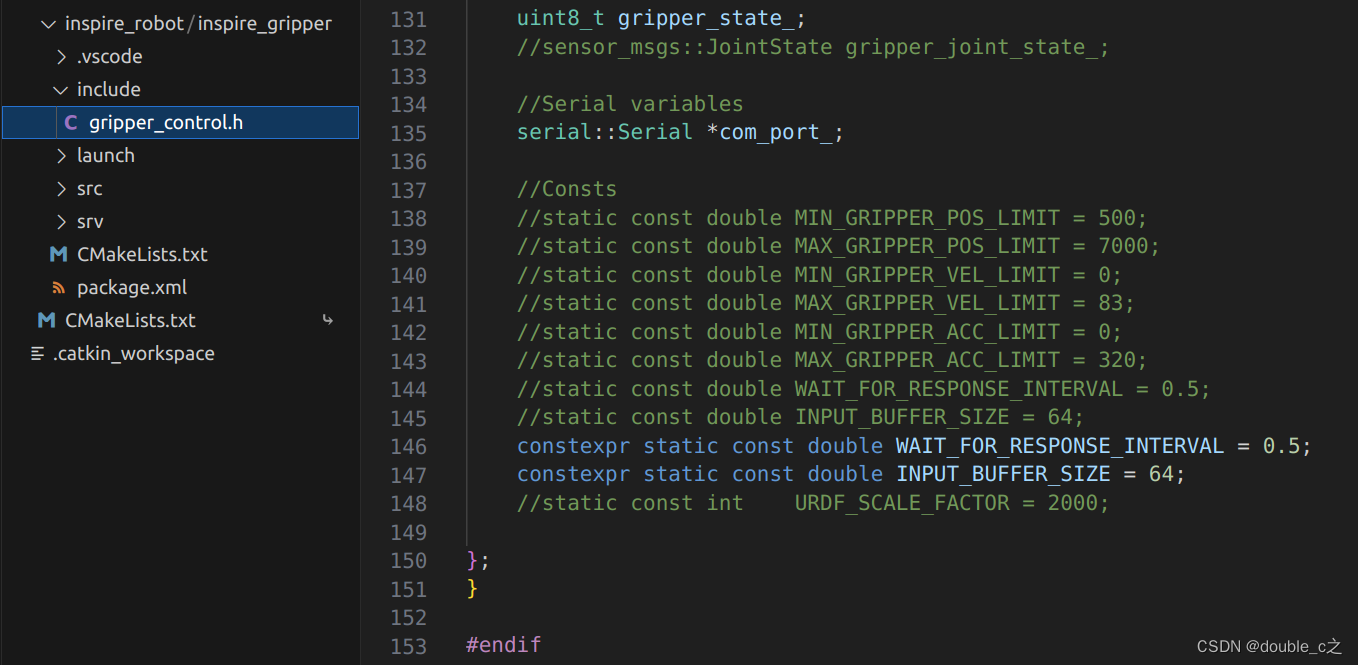
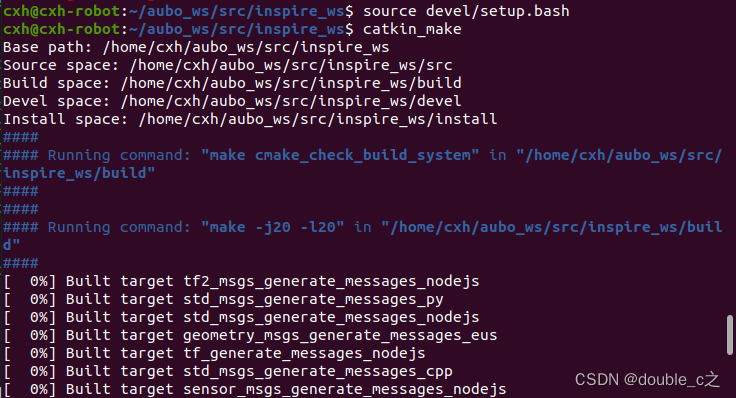
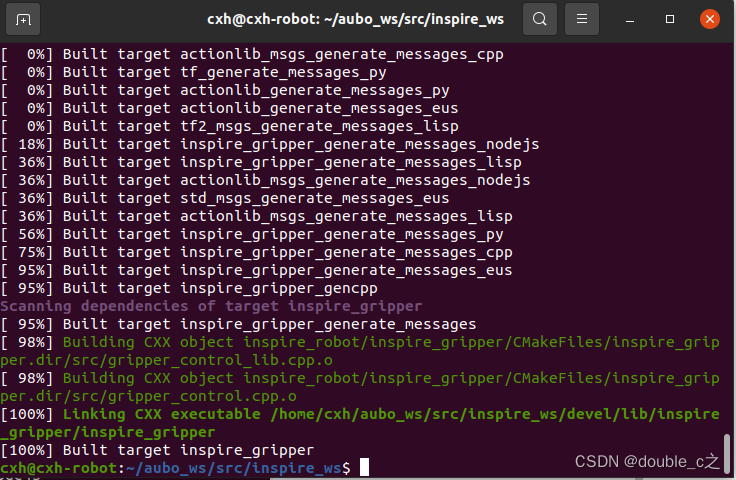
即可完成对夹爪驱动程序的编译工作:
这篇关于noetic ros配置因时机械夹爪的驱动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






