本文主要是介绍Stm32 使用软件IIC驱动FM24CL64B-GTR,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先让我进行一个祈祷仪式 (感谢原子哥给我一口饭吃 阿门)
先附上我的原理图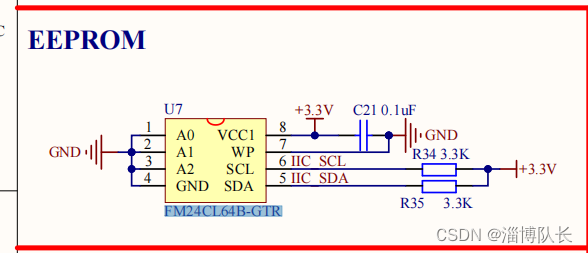
我的FM24CL64B的设备地址 因为A0,A1,A2都被接地了 查阅硬件手册
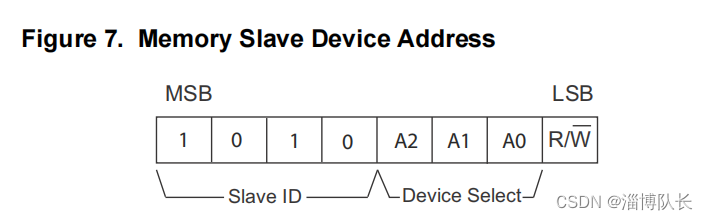
高四位是固定的地址 低四位A2,A1 , A0对应的是引脚电平的信号(硬件手册中没有写 高电平代表1 还是代表0 我实测是 高为1 低为0)
R/W这一位 硬件手册中注明了

所以我们的写入从地址为 10100000 == 0XA0
读取设备地址为 10100001 == 0XA1
ok有了以上的铺垫 我们可以直接使用原子哥写好的myiic.h 与 myiic.c 来进行iic通信 我在这里先附上原子哥的代码
这是myiic.c
#include "myiic.h"/*** @brief 初始化IIC* @param 无* @retval 无*/
void iic_init(void)
{GPIO_InitTypeDef gpio_init_struct;IIC_SCL_GPIO_CLK_ENABLE(); /* SCL引脚时钟使能 */IIC_SDA_GPIO_CLK_ENABLE(); /* SDA引脚时钟使能 */gpio_init_struct.Pin = IIC_SCL_GPIO_PIN;gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 快速 */HAL_GPIO_Init(IIC_SCL_GPIO_PORT, &gpio_init_struct);/* SCL */gpio_init_struct.Pin = IIC_SDA_GPIO_PIN;gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 开漏输出 */HAL_GPIO_Init(IIC_SDA_GPIO_PORT, &gpio_init_struct);/* SDA *//* SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */iic_stop(); /* 停止总线上所有设备 */
}/*** @brief IIC延时函数,用于控制IIC读写速度* @param 无* @retval 无*/
static void iic_delay(void)
{// delay_us(2); /* 2us的延时, 读写速度在250Khz以内 */HAL_Delay(2);
}/*** @brief 产生IIC起始信号* @param 无* @retval 无*/
void iic_start(void)
{IIC_SDA(1);IIC_SCL(1);iic_delay();IIC_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */iic_delay();IIC_SCL(0); /* 钳住I2C总线,准备发送或接收数据 */iic_delay();
}/*** @brief 产生IIC停止信号* @param 无* @retval 无*/
void iic_stop(void)
{IIC_SDA(0); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */iic_delay();IIC_SCL(1);iic_delay();IIC_SDA(1); /* 发送I2C总线结束信号 */iic_delay();
}/*** @brief 等待应答信号到来* @param 无* @retval 1,接收应答失败* 0,接收应答成功*/
uint8_t iic_wait_ack(void)
{uint8_t waittime = 0;uint8_t rack = 0;IIC_SDA(1); /* 主机释放SDA线(此时外部器件可以拉低SDA线) */iic_delay();IIC_SCL(1); /* SCL=1, 此时从机可以返回ACK */iic_delay();while (IIC_READ_SDA) /* 等待应答 */{waittime++;if (waittime > 250){iic_stop();rack = 1;break;}}IIC_SCL(0); /* SCL=0, 结束ACK检查 */iic_delay();return rack;
}/*** @brief 产生ACK应答* @param 无* @retval 无*/
void iic_ack(void)
{IIC_SDA(0); /* SCL 0 -> 1 时 SDA = 0,表示应答 */iic_delay();IIC_SCL(1); /* 产生一个时钟 */iic_delay();IIC_SCL(0);iic_delay();IIC_SDA(1); /* 主机释放SDA线 */iic_delay();
}/*** @brief 不产生ACK应答* @param 无* @retval 无*/
void iic_nack(void)
{IIC_SDA(1); /* SCL 0 -> 1 时 SDA = 1,表示不应答 */iic_delay();IIC_SCL(1); /* 产生一个时钟 */iic_delay();IIC_SCL(0);iic_delay();
}/*** @brief IIC发送一个字节* @param data: 要发送的数据* @retval 无*/
void iic_send_byte(uint8_t data)
{uint8_t t;for (t = 0; t < 8; t++){IIC_SDA((data & 0x80) >> 7); /* 高位先发送 */iic_delay();IIC_SCL(1);iic_delay();IIC_SCL(0);data <<= 1; /* 左移1位,用于下一次发送 */}IIC_SDA(1); /* 发送完成, 主机释放SDA线 */
}/*** @brief IIC读取一个字节* @param ack: ack=1时,发送ack; ack=0时,发送nack* @retval 接收到的数据*/
uint8_t iic_read_byte(uint8_t ack)
{uint8_t i, receive = 0;for (i = 0; i < 8; i++ ) /* 接收1个字节数据 */{receive <<= 1; /* 高位先输出,所以先收到的数据位要左移 */IIC_SCL(1);iic_delay();if (IIC_READ_SDA){receive++;}IIC_SCL(0);iic_delay();}if (!ack){iic_nack(); /* 发送nACK */}else{iic_ack(); /* 发送ACK */}return receive;
}这是myiic.h
#ifndef __MYIIC_H #define __MYIIC_H#include "main.h"/******************************************************************************************/ /* 引脚 定义 */#define IIC_SCL_GPIO_PORT IIC2_SCL_GPIO_Port #define IIC_SCL_GPIO_PIN IIC2_SCL_Pin #define IIC_SCL_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PB口时钟使能 */#define IIC_SDA_GPIO_PORT IIC2_SDA_GPIO_Port #define IIC_SDA_GPIO_PIN IIC2_SDA_Pin #define IIC_SDA_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PB口时钟使能 *//******************************************************************************************//* IO操作 */ #define IIC_SCL(x) do{ x ? \HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_RESET); \}while(0) /* SCL */#define IIC_SDA(x) do{ x ? \HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_RESET); \}while(0) /* SDA */#define IIC_READ_SDA HAL_GPIO_ReadPin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN) /* 读取SDA *//* IIC所有操作函数 */ void iic_init(void); /* 初始化IIC的IO口 */ void iic_start(void); /* 发送IIC开始信号 */ void iic_stop(void); /* 发送IIC停止信号 */ void iic_ack(void); /* IIC发送ACK信号 */ void iic_nack(void); /* IIC不发送ACK信号 */ uint8_t iic_wait_ack(void); /* IIC等待ACK信号 */ void iic_send_byte(uint8_t txd);/* IIC发送一个字节 */ uint8_t iic_read_byte(unsigned char ack);/* IIC读取一个字节 */#endif
有了原子哥的iic通信 我们在加上FM24CL64的通信协议
附上fm24cl64b.c
#include "fm24cl64b.h"
#include "myiic.h"//2023-7-12
//jsw
//功能描述: EEPROM的写入
//1.要写入的数据首地址 2.要写入的EEPROM地址 3.长度 单位是(一个字节 = 8bit)
u8_t EEPROM_Write(u8_t *_pbyte, u16_t _addr, u16_t _byte_count)
{u8_t addr_h = 0, addr_l = 0;u8_t i;addr_h = _addr/EEPROM_PAGE_SIZE;addr_l = _addr%EEPROM_PAGE_SIZE;iic_start();iic_send_byte(EEPROM_WRITE_ADDR);if(iic_wait_ack()){iic_stop();return EEPROM_FALSE;}iic_send_byte(addr_h);iic_wait_ack();iic_send_byte(addr_l);iic_wait_ack();for (i=0; i<_byte_count; i++){iic_send_byte(*(_pbyte+i));iic_wait_ack();}iic_stop();return EEPROM_TRUE;
}
//2023-7-12
//jsw
//功能描述: EEPROM的读取
//1.用来读取的数据首地址 2.要读取的EEPROM地址 3.长度 单位是(一个字节 = 8bit)
u8_t EEPROM_Read(u8_t *_pbyte, u16_t _addr, u16_t _byte_count)
{u8_t addr_h = 0, addr_l = 0;u8_t i;addr_h = _addr/EEPROM_PAGE_SIZE;addr_l = _addr%EEPROM_PAGE_SIZE;iic_start();iic_send_byte(EEPROM_WRITE_ADDR);if(iic_wait_ack()){iic_stop();return EEPROM_FALSE;}iic_send_byte(addr_h);iic_wait_ack();iic_send_byte(addr_l);iic_wait_ack();iic_start();iic_send_byte(EEPROM_READ_ADDR);iic_wait_ack();for (i=0; i<_byte_count-1; i++){*(_pbyte+i) = iic_read_byte(0);iic_ack();}*(_pbyte+_byte_count-1) = iic_read_byte(0);iic_nack();iic_stop();return EEPROM_TRUE;
}附上fm24cl64b.h
#ifndef _BSP_EEPROM_H_
#define _BSP_EEPROM_H_#include "main.h"#define EEPROM_PAGE_SIZE 256
//设备写入从地址
#define EEPROM_WRITE_ADDR 0XA0
//设备读取从地址
#define EEPROM_READ_ADDR 0XA1
//表示结果为真
#define EEPROM_TRUE 1
//表示结果为假
#define EEPROM_FALSE 0
//2023-7-12
//jsw
//功能描述: EEPROM的写入
//1.要写入的数据首地址 2.要写入的EEPROM地址 3.长度 单位是(一个字节 = 8bit)
extern u8_t EEPROM_Write(u8_t *_pbyte, u16_t _addr, u16_t _byte_count);
//2023-7-12
//jsw
//功能描述: EEPROM的读取
//1.用来读取的数据首地址 2.要读取的EEPROM地址 3.长度 单位是(一个字节 = 8bit)
extern u8_t EEPROM_Read(u8_t *_pbyte, u16_t _addr, u16_t _byte_count);//--------------------↓设备存取的所有变量表↓--------------------//--------------------↑设备存取的所有变量表↑--------------------
#endif然后进行读写测试 成功 让我们再次感谢原子哥给我一口饭吃 阿门
这篇关于Stm32 使用软件IIC驱动FM24CL64B-GTR的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





