本文主要是介绍无人机基础技术,固定翼无人机动力系统技术详解,无人机飞行控制系统技术,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
推重比选择
推重比,是指无人机发动机推力/拉力与无人机飞行重力之比。该参数是衡量动力系统乃至整机性能的重要参数,很大程度上影响飞行性能。固定翼无人机的动力系统在配置时选择的推重比必须达到或超出设计的推重比。

重量要求
翼载荷是无人机单位面积升力面所承受的气动力载荷。翼载荷可衡量飞行中机翼的受载状况,直接影响到无人机的飞行性能:翼载荷小,飞行速度慢,无人机的操纵性和机动性较好:翼载荷大,飞行速度快,无人机的机动性较差,但飞行阻力小,抗风性和穿透性较好。
安装符合配平要求
无人机的配平对飞行性能影响很大,因此在选配和安装动力系统时,都要格外注意无人机的配平。
一般在选择零部件初期和进行改装、动力升级等适合,都应大致估算动力系统的总重、规划各部件的安装位置,保证动力系统的安装,必须符合配平要求,保证重心处于设计位置。
尤其电动动力系统的重量占无人机总重的比例较大。安装时,尽可能通过移动电池的方法调整无人机的重心位置,尽可能做到“零配重”或小配重。如果发生受空间等限制无法配平,或需较大重置配重的情况,则应考虑更改动力系统的配置,或修改无人机总体布局设计。
1、电动系统的组成
固定翼无人机的电动系统由螺旋桨、电动机、电调、电池组成。
2、选配要求
首先根据估算的翼载荷和推重比,得出动力系统应提供的拉力大小选出合适级别的电机和螺旋桨组合;
然后依据所选电机的最大额定电流,选择所需电调,电调的标称电流应大于电路最大额定电流;
最后参照电路的稳定电流,并根据整机的重量要求,选择一块合适的动力电池。
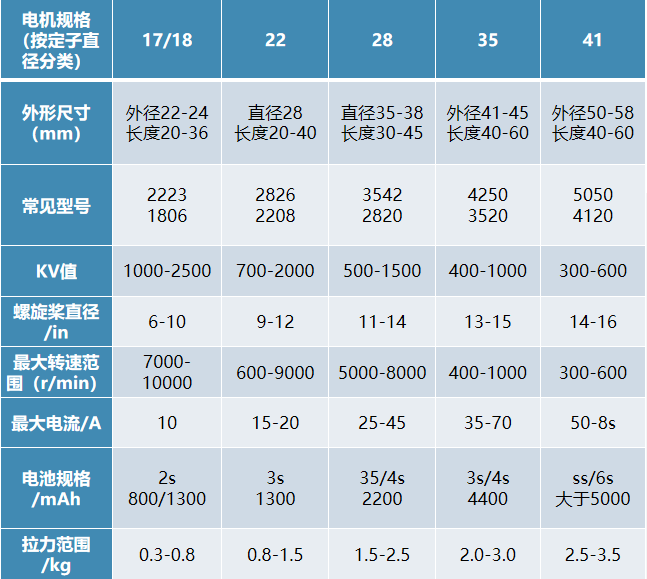
在遵循配置原则的基础上,小型及以下固定翼无人机采用电动系统时,可以参考一些经验数据,如表。
在初步选配后,还应主要考虑几方面内容:
(1)螺旋桨的选择
由于螺旋桨的拉力受直径,桨叶面积影响,因此在其他条件允许的情况下,可尽量选择大直径的螺旋桨。
(2)电机的选择
在电流、功率等参数相同的情况下,大直径、小长度的电机往往比小直径、大长度的电机具备更好的散热能力。
(3)电调的选择
电子调速器额定电流应与电机的工作电流一致,其标称电流应大于或等于电路的最大额定电流。
(4)电池的选择
由于电池的重量占动力系统总重的比例最大,对翼载荷、推重比等参数影响较大,因此它的选配需要仔细权衡。
8S锂电池的满电电压大约为33.6V(8×4.2V),人体所能承受的安全电压为36V,因此,使用过程具有一定的危险性,一般不建议使用8S以上的锂电池组,在确实需要如此大功率输出的模型无人机上,可采用多发布局,或采用油动动力系统。
3、组装要求
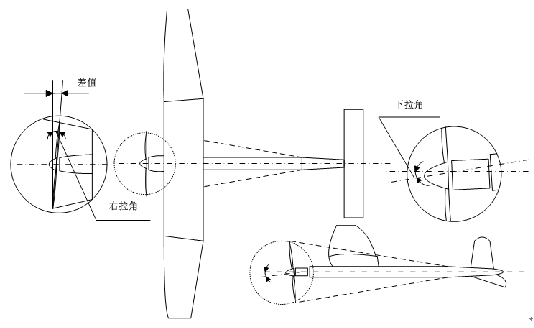
电机安装角是一个十分重要的设置,它的设定关系到无人机的飞行稳定性。在固定翼无人机安装里尤为重要和明显。
拉力线,是指固定翼无人机的发动机/电机(带动螺旋桨)产生拉力/推力的轴线。拉力线与无人机的机身轴线的夹角,就是电机安装角,一般是指右拉角和下拉角,相对与机身轴线来说,电机轴线无人机前进方向的右前方延伸角度是右拉角,向前下方延伸的角度是下拉角。
电子调速器的连接方法是:调速器的三芯插头(即信号插头)直接插入接收机的油门通道;
无刷电机与调速器的三条连接线没有固定的连接顺序,一般是先按顺序或导线的颜色连接,在试车时如果发现电机的旋转方向不对,可调换任意两条接线的位置。
电动无人机的操作顺序一定要先打开遥控,开机前要要确认油门操纵杆放到了最低位置,然后再接通动力电源。
螺旋桨安装一般根据所配固定翼无人机的机型有不同要求,如某油动固定翼无人机采用木质螺旋桨,用螺纹连接固定,注意螺旋桨有字的一面都应该朝向无人机的前进方向。

油动系统组成
固定翼无人机常用的发动机按工作方式可分成二冲程发动机与四冲程发动机。按燃料分,发动机分为甲醇发动机和汽油发动机。
舵机的主要作用是控制节气门改变空气燃料混合比,以此来调节发动机的输出功率及转速。
要保证发动机正常工作,还需要一些必要的辅助系统。它们主要有进气系统、燃料系统、点火系统、冷却系统、启动系统、定时系统和散热系统等。
选配要求
首先根据估算的翼载荷和推重比,得出动力系统应提供的拉力大小选出合适级别的发动机;然后根据发动机选择与之匹配的螺旋桨;最后根据无人机结构、燃料性质选择合适的辅助系统。
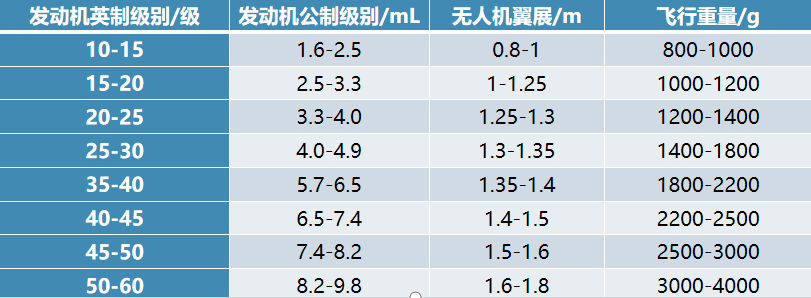
根据无人机级别确定发动机的级别,对于小型及以下固定翼无人机,发动机的部分选用配合,如表所示。发动机的级别是按汽缸的工作容积计算的,计量单位有英制(级)和公制(mL)。
二行程发动机转速较高。经常用于低成本的小型无人机。
四行程发动机转速较低、油耗低、噪声也小。经常作为特技无人机和中型无人机的动力。
磨合用的螺旋桨和正常飞行用的螺旋桨不同,磨合用螺旋桨重量应大些、直径应小些,螺距(桨距)要大些,以便于增加发动机的起动能力和鼓风能力,部分螺旋桨与发动机的匹配,如表所示。

组装要求
1)发动机检查
清洁非常重要,极少的脏物或沙土进入发动机内部,运转后会引起发动机的严重磨损。检查时,应从排气口和进气口等地方着手;发动机的外部也应保持干净,外部脏物容易进入发动机内部,平时要保持清洁,去除油污、脏物或沙土。发现零件缺少或损坏,均不能安装使用,应配齐、调换或修理方能使用。对于易损件应按要求常备并定期更换。
检查安装位置是否正确,安装是否牢固,安装的正反方向是否符合说明书要求等,应严格按照安装步骤进行检查。关键是检查气缸和活塞的配合情况。
先装上螺旋桨,慢慢地左右拨动,使曲轴跟着左右转动,根据转动过程中的情况判断气缸与活塞的配合是否合适,若不合适应该根据说明书作出适当调整,同时还应试验活塞和气缸的气密性。
2)发动机安装
发动机根据无人机机身设计要求,安装到机身上,注意安装发动机一般配有发动机架,安装应用专用的螺杆螺帽,同时加上螺丝胶或橡胶垫。
3)螺旋桨安装
将螺旋桨装在曲轴前部的两个垫片间,转动曲轴使活塞向上运动并开始压缩,同时将螺旋桨转到水平方向,然后用扳手拧紧桨帽,并把螺旋桨固定在这个位置上。
初次练习起动时,可用直径较大和较重的螺旋桨。既容易起动,又不易反转和打手。起动技术熟练后,再换用短一些的螺旋桨。地面练习起动用的螺旋桨,其桨叶可做得厚些,并要很好地平衡。
4)其他要求
油箱,是保证发动机正常工作的一个重要部件,安装时注意油箱油面高度和喷油管的相对位置。一般是使油面和喷油管在同一水平面上或稍低几毫米,往油箱加油时应当注意这一点。

油箱要尽可能靠近发动机。要经常检查油管是否畅通,不要被脏物堵塞。要注意检查油路漏气情况。
推重比选择
推重比,是指无人机发动机推力/拉力与无人机飞行重力之比。该参数是衡量动力系统乃至整机性能的重要参数,很大程度上影响飞行性能。固定翼无人机的动力系统在配置时选择的推重比必须达到或超出设计的推重比。
重量要求
翼载荷是无人机单位面积升力面所承受的气动力载荷。翼载荷可衡量飞行中机翼的受载状况,直接影响到无人机的飞行性能:翼载荷小,飞行速度慢,无人机的操纵性和机动性较好:翼载荷大,飞行速度快,无人机的机动性较差,但飞行阻力小,抗风性和穿透性较好。
安装符合配平要求
无人机的配平对飞行性能影响很大,因此在选配和安装动力系统时,都要格外注意无人机的配平。
一般在选择零部件初期和进行改装、动力升级等适合,都应大致估算动力系统的总重、规划各部件的安装位置,保证动力系统的安装,必须符合配平要求,保证重心处于设计位置。
尤其电动动力系统的重量占无人机总重的比例较大。安装时,尽可能通过移动电池的方法调整无人机的重心位置,尽可能做到“零配重”或小配重。如果发生受空间等限制无法配平,或需较大重置配重的情况,则应考虑更改动力系统的配置,或修改无人机总体布局设计。
1、电动系统的组成
固定翼无人机的电动系统由螺旋桨、电动机、电调、电池组成。
2、选配要求
首先根据估算的翼载荷和推重比,得出动力系统应提供的拉力大小选出合适级别的电机和螺旋桨组合;
然后依据所选电机的最大额定电流,选择所需电调,电调的标称电流应大于电路最大额定电流;
最后参照电路的稳定电流,并根据整机的重量要求,选择一块合适的动力电池。
在遵循配置原则的基础上,小型及以下固定翼无人机采用电动系统时,可以参考一些经验数据,如表。
在初步选配后,还应主要考虑几方面内容:
(1)螺旋桨的选择
由于螺旋桨的拉力受直径,桨叶面积影响,因此在其他条件允许的情况下,可尽量选择大直径的螺旋桨。
(2)电机的选择
在电流、功率等参数相同的情况下,大直径、小长度的电机往往比小直径、大长度的电机具备更好的散热能力。
(3)电调的选择
电子调速器额定电流应与电机的工作电流一致,其标称电流应大于或等于电路的最大额定电流。
(4)电池的选择
由于电池的重量占动力系统总重的比例最大,对翼载荷、推重比等参数影响较大,因此它的选配需要仔细权衡。
8S锂电池的满电电压大约为33.6V(8×4.2V),人体所能承受的安全电压为36V,因此,使用过程具有一定的危险性,一般不建议使用8S以上的锂电池组,在确实需要如此大功率输出的模型无人机上,可采用多发布局,或采用油动动力系统。
3、组装要求
电机安装角是一个十分重要的设置,它的设定关系到无人机的飞行稳定性。在固定翼无人机安装里尤为重要和明显。
拉力线,是指固定翼无人机的发动机/电机(带动螺旋桨)产生拉力/推力的轴线。拉力线与无人机的机身轴线的夹角,就是电机安装角,一般是指右拉角和下拉角,相对与机身轴线来说,电机轴线无人机前进方向的右前方延伸角度是右拉角,向前下方延伸的角度是下拉角。
电子调速器的连接方法是:调速器的三芯插头(即信号插头)直接插入接收机的油门通道;
无刷电机与调速器的三条连接线没有固定的连接顺序,一般是先按顺序或导线的颜色连接,在试车时如果发现电机的旋转方向不对,可调换任意两条接线的位置。
电动无人机的操作顺序一定要先打开遥控,开机前要要确认油门操纵杆放到了最低位置,然后再接通动力电源。
螺旋桨安装一般根据所配固定翼无人机的机型有不同要求,如某油动固定翼无人机采用木质螺旋桨,用螺纹连接固定,注意螺旋桨有字的一面都应该朝向无人机的前进方向。
油动系统组成
固定翼无人机常用的发动机按工作方式可分成二冲程发动机与四冲程发动机。按燃料分,发动机分为甲醇发动机和汽油发动机。
舵机的主要作用是控制节气门改变空气燃料混合比,以此来调节发动机的输出功率及转速。
要保证发动机正常工作,还需要一些必要的辅助系统。它们主要有进气系统、燃料系统、点火系统、冷却系统、启动系统、定时系统和散热系统等。
选配要求
首先根据估算的翼载荷和推重比,得出动力系统应提供的拉力大小选出合适级别的发动机;然后根据发动机选择与之匹配的螺旋桨;最后根据无人机结构、燃料性质选择合适的辅助系统。
根据无人机级别确定发动机的级别,对于小型及以下固定翼无人机,发动机的部分选用配合,如表所示。发动机的级别是按汽缸的工作容积计算的,计量单位有英制(级)和公制(mL)。
二行程发动机转速较高。经常用于低成本的小型无人机。
四行程发动机转速较低、油耗低、噪声也小。经常作为特技无人机和中型无人机的动力。
磨合用的螺旋桨和正常飞行用的螺旋桨不同,磨合用螺旋桨重量应大些、直径应小些,螺距(桨距)要大些,以便于增加发动机的起动能力和鼓风能力,部分螺旋桨与发动机的匹配,如表所示。
组装要求
1)发动机检查
清洁非常重要,极少的脏物或沙土进入发动机内部,运转后会引起发动机的严重磨损。检查时,应从排气口和进气口等地方着手;发动机的外部也应保持干净,外部脏物容易进入发动机内部,平时要保持清洁,去除油污、脏物或沙土。发现零件缺少或损坏,均不能安装使用,应配齐、调换或修理方能使用。对于易损件应按要求常备并定期更换。
检查安装位置是否正确,安装是否牢固,安装的正反方向是否符合说明书要求等,应严格按照安装步骤进行检查。关键是检查气缸和活塞的配合情况。
先装上螺旋桨,慢慢地左右拨动,使曲轴跟着左右转动,根据转动过程中的情况判断气缸与活塞的配合是否合适,若不合适应该根据说明书作出适当调整,同时还应试验活塞和气缸的气密性。
2)发动机安装
发动机根据无人机机身设计要求,安装到机身上,注意安装发动机一般配有发动机架,安装应用专用的螺杆螺帽,同时加上螺丝胶或橡胶垫。
3)螺旋桨安装
将螺旋桨装在曲轴前部的两个垫片间,转动曲轴使活塞向上运动并开始压缩,同时将螺旋桨转到水平方向,然后用扳手拧紧桨帽,并把螺旋桨固定在这个位置上。
初次练习起动时,可用直径较大和较重的螺旋桨。既容易起动,又不易反转和打手。起动技术熟练后,再换用短一些的螺旋桨。地面练习起动用的螺旋桨,其桨叶可做得厚些,并要很好地平衡。
4)其他要求
油箱,是保证发动机正常工作的一个重要部件,安装时注意油箱油面高度和喷油管的相对位置。一般是使油面和喷油管在同一水平面上或稍低几毫米,往油箱加油时应当注意这一点。
油箱要尽可能靠近发动机。要经常检查油管是否畅通,不要被脏物堵塞。要注意检查油路漏气情况。
👇👇👇👇👇👇关注公众号“创小董”获取更多内容👇👇👇👇👇👇

这篇关于无人机基础技术,固定翼无人机动力系统技术详解,无人机飞行控制系统技术的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!