本文主要是介绍线阵相机之帧超时,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 帧超时的效果
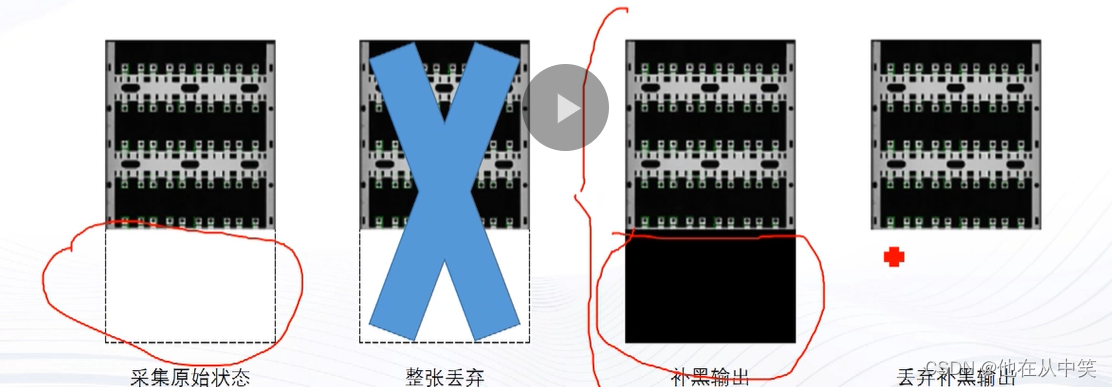
在帧超时时间内相机若未采集完一张图像所需的行数,则相机会直接完成这张图像的采集,并自动将缺失行数补黑出图,机制有以下几种选择:
1. 丢弃整张补黑的图像
2. 保留补黑部分出图
3.丢弃补黑部分出图
这篇关于线阵相机之帧超时的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍线阵相机之帧超时,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 帧超时的效果
在帧超时时间内相机若未采集完一张图像所需的行数,则相机会直接完成这张图像的采集,并自动将缺失行数补黑出图,机制有以下几种选择:
1. 丢弃整张补黑的图像
2. 保留补黑部分出图
3.丢弃补黑部分出图
这篇关于线阵相机之帧超时的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/732594。
23002807@qq.com






