本文主要是介绍智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。
(报告出品方:开源证券)
报告共计:43页
视觉感知最佳辅助——4D 成像毫米波雷达
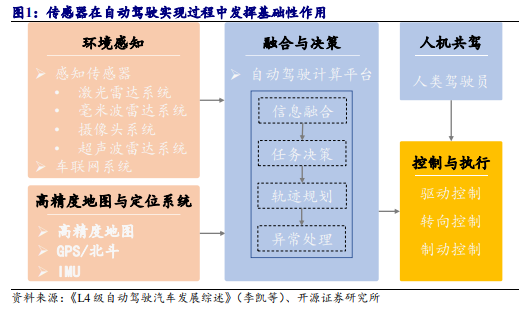
感知是自动驾驶的首要环节,高性能传感器必不可少
感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶 的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物 体等信息进行有效捕捉,根据实时感知的环境信息,自动驾驶系统得以完成接下来 的决策、规划与控制等环节。传感器的性能会直接影响到感知信息的质量,目前广 泛搭载的传感器有摄像头、激光雷达、毫米波雷达、超声波雷达等。
特斯拉的视觉感知方案推动自动驾驶行业进入新的篇章。2021 年,特斯拉使用 Transformer 算法构建 BEV(Bird’s Eye-View, 鸟瞰图)空间,解决了传统视觉感知 的深度探测难点,从而通过视觉也可以进行较为准确的距离估计;同时, Transformer 算法更契合多个传感器融合,可拓展性更强。2022 年,特斯拉使用基 于 BEV+Transformer 和占用网络,形成对外部 3D 空间的还原,对通用障碍物感知能力进一步增强。特斯拉依靠摄像头进行感知的 FSD 功能已经能够实现近乎对全部 驾驶场景的覆盖,累计行驶里程呈指数型增长。

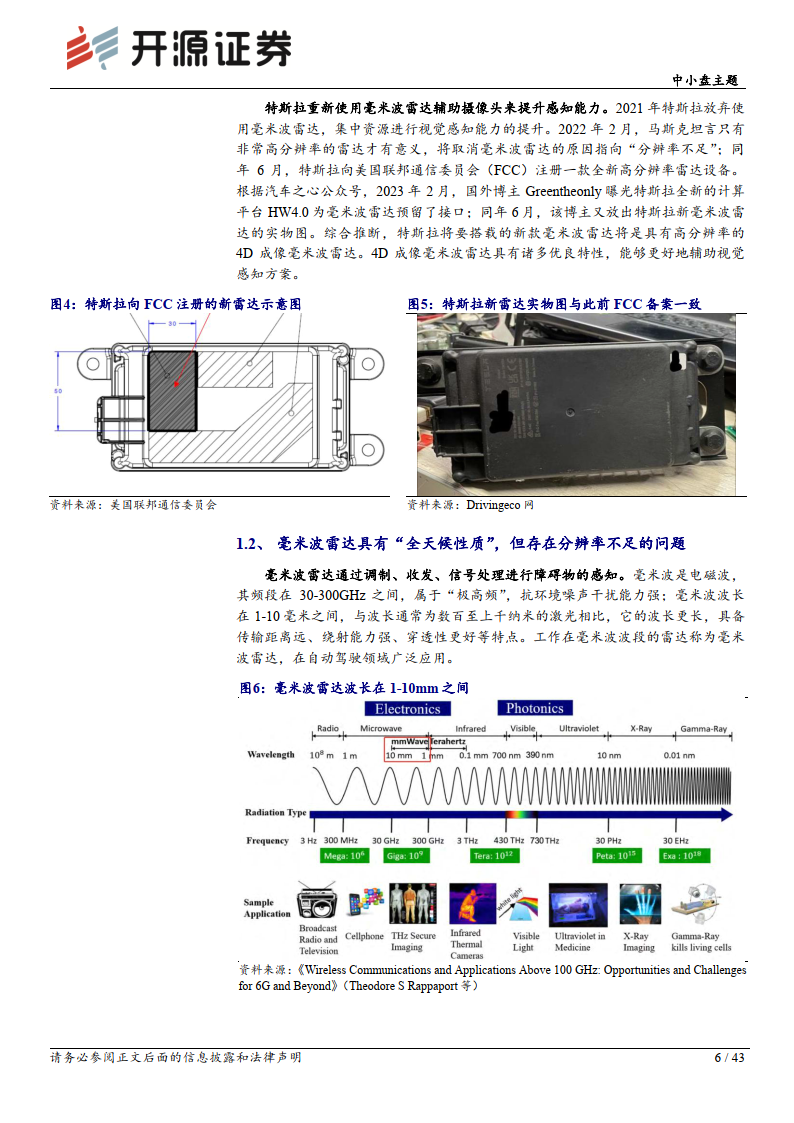
特斯拉重新使用毫米波雷达辅助摄像头来提升感知能力。2021 年特斯拉放弃使 用毫米波雷达,集中资源进行视觉感知能力的提升。2022 年 2 月,马斯克坦言只有 非常高分辨率的雷达才有意义,将取消毫米波雷达的原因指向“分辨率不足”;同 年 6 月,特斯拉向美国联邦通信委员会(FCC)注册一款全新高分辨率雷达设备。 根据汽车之心公众号,2023 年 2 月,国外博主 Greentheonly 曝光特斯拉全新的计算 平台 HW4.0 为毫米波雷达预留了接口;同年 6 月,该博主又放出特斯拉新毫米波雷达的实物图。综合推断,特斯拉将要搭载的新款毫米波雷达将是具有高分辨率的 4D 成像毫米波雷达。4D 成像毫米波雷达具有诸多优良特性,能够更好地辅助视觉感知方案。

毫米波雷达具有“全天候性质”,但存在分辨率不足的问题
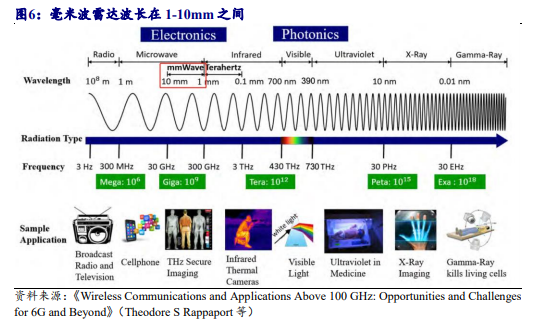
毫米波雷达通过调制、收发、信号处理进行障碍物的感知。毫米波是电磁波, 其频段在 30-300GHz 之间,属于“极高频”,抗环境噪声干扰能力强;毫米波波长 在 1-10 毫米之间,与波长通常为数百至上千纳米的激光相比,它的波长更长,具备传输距离远、绕射能力强、穿透性更好等特点。工作在毫米波波段的雷达称为毫米波雷达,在自动驾驶领域广泛应用。
毫米波雷达主要由雷达前端收发模块、数字信号处理单元以及接口模块组成。 雷达前端收发模块进行毫米波信号的调制、发射与接收,包括天线阵列、射频前端、 中频电路、模数转换器;数字信号处理单元进行信号处理与数据处理,包括 DSP (数字信号处理器)、MCU(微控制单元)或 FPGA(现场可编程门阵列)等;接口模块负责数据通信以及与其他系统的集成。毫米波半导体技术已经比较成熟,已经在自动驾驶车辆中广泛应用。
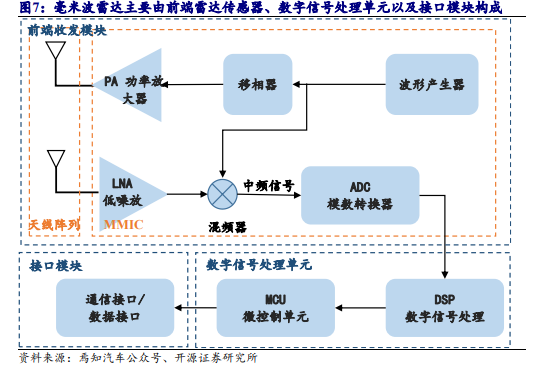
信号收发与信号处理是毫米波雷达运行的重点环节。毫米波雷达工作流程如图 7 所示:(1)首先射频发射器产生电磁波信号并且将之发射,信号到达目标物体; (2)物体反射或者散射信号形成回波信号,接收器接收回波信号;(3)混频器将 回波信号与原始信号混合,经过滤波器进行滤波,得到中频信号(实际是雷达发射信号与回波信号的频率差,包含有物体的位置、速度等信息);(4)中频信号输入到处理后端进行调制解调、FFT(Fast Fourier Transform,快速傅里叶变换)等算法处理,提取目标信息并进行分析,实现目标检测、距离测量、速度测量、方位估计; (5)最终将结果输出以进行后续感知处理。

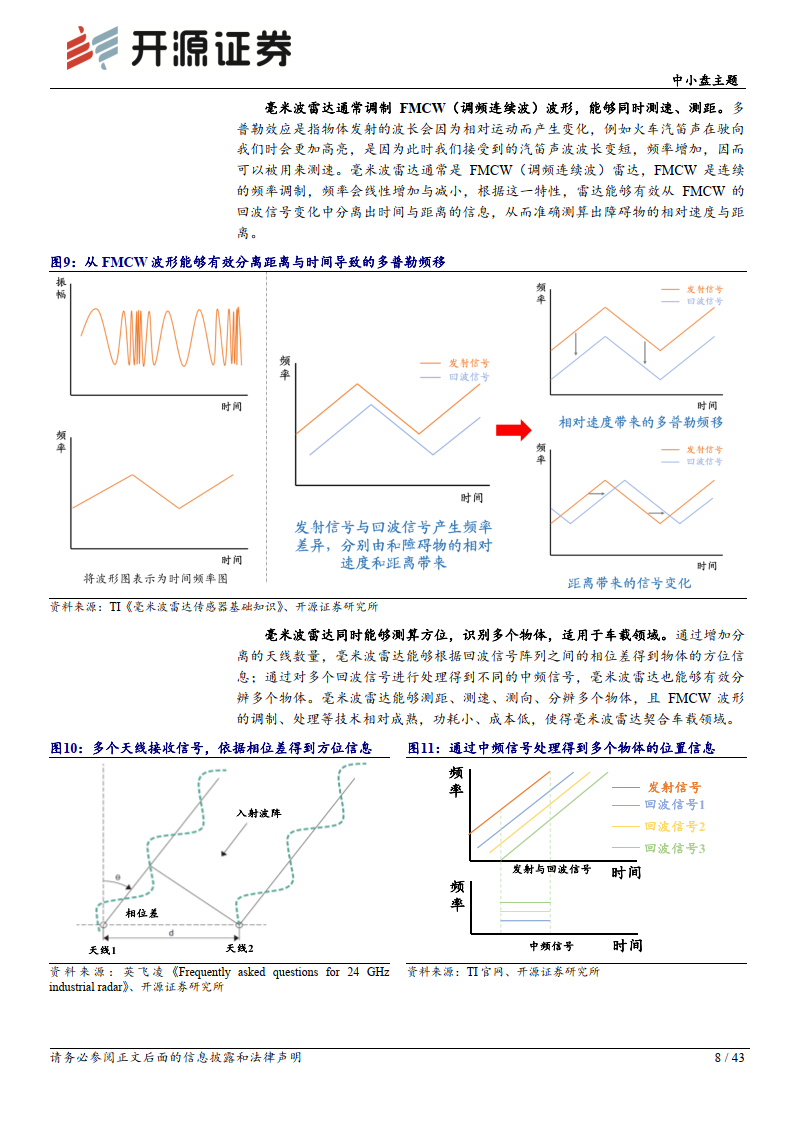
毫米波雷达通常调制 FMCW(调频连续波)波形,能够同时测速、测距。多 普勒效应是指物体发射的波长会因为相对运动而产生变化,例如火车汽笛声在驶向 我们时会更加高亮,是因为此时我们接受到的汽笛声波波长变短,频率增加,因而 可以被用来测速。毫米波雷达通常是 FMCW(调频连续波)雷达,FMCW 是连续 的频率调制,频率会线性增加与减小,根据这一特性,雷达能够有效从 FMCW 的 回波信号变化中分离出时间与距离的信息,从而准确测算出障碍物的相对速度与距离。

毫米波雷达同时能够测算方位,识别多个物体,适用于车载领域。通过增加分离的天线数量,毫米波雷达能够根据回波信号阵列之间的相位差得到物体的方位信 息;通过对多个回波信号进行处理得到不同的中频信号,毫米波雷达也能够有效分 辨多个物体。毫米波雷达能够测距、测速、测向、分辨多个物体,且 FMCW 波形 的调制、处理等技术相对成熟,功耗小、成本低,使得毫米波雷达契合车载领域。

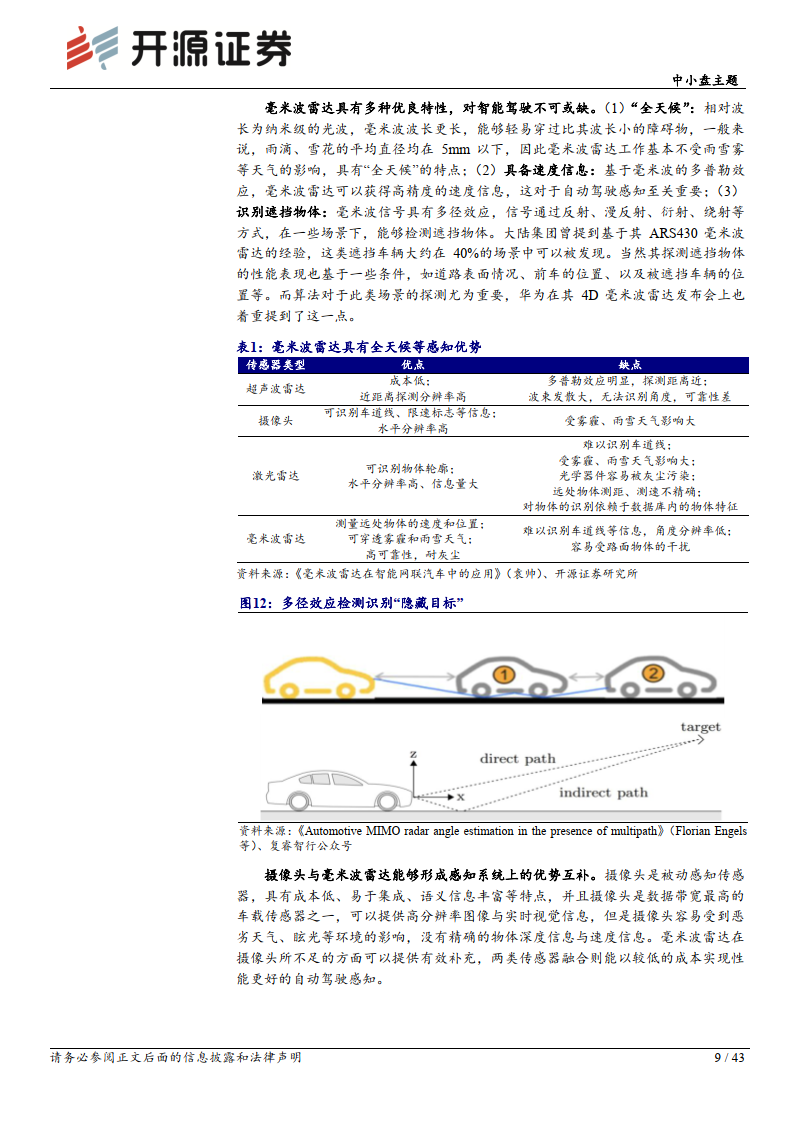
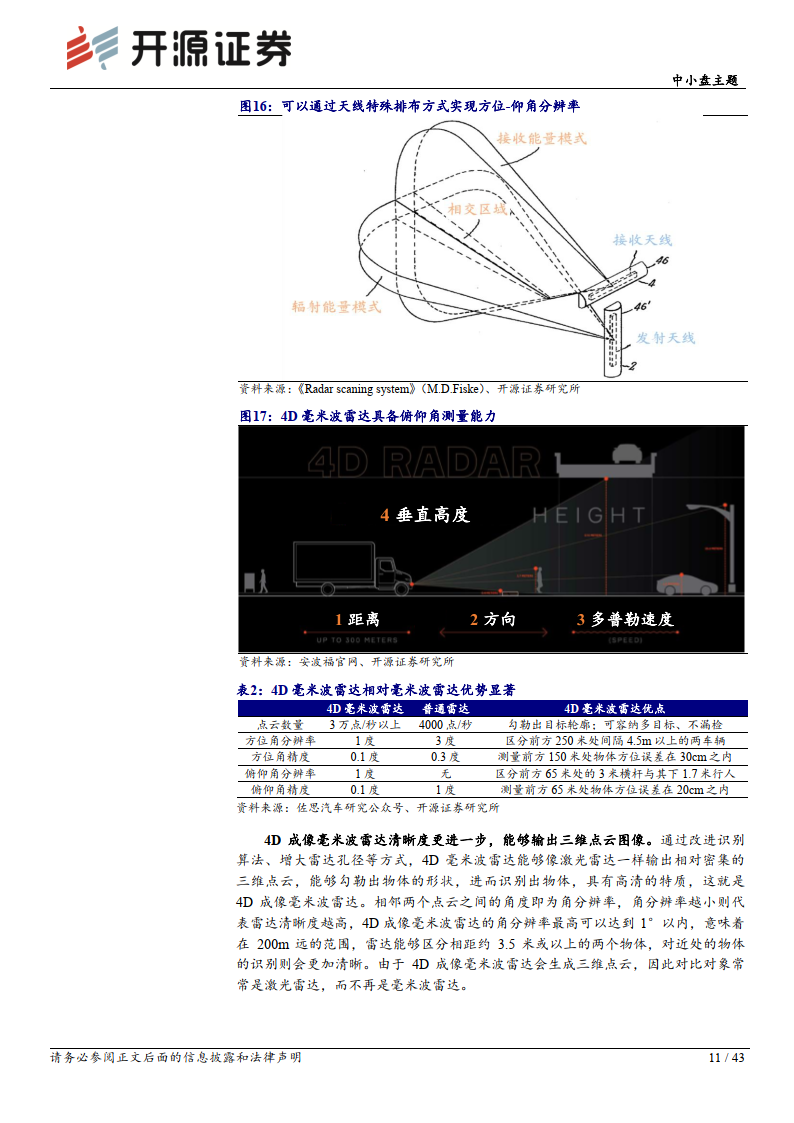
毫米波雷达具有多种优良特性,对智能驾驶不可或缺。(1)“全天候”:相对波 长为纳米级的光波,毫米波波长更长,能够轻易穿过比其波长小的障碍物,一般来 说,雨滴、雪花的平均直径均在 5mm 以下,因此毫米波雷达工作基本不受雨雪雾 等天气的影响,具有“全天候”的特点;(2)具备速度信息:基于毫米波的多普勒效 应,毫米波雷达可以获得高精度的速度信息,这对于自动驾驶感知至关重要;(3) 识别遮挡物体:毫米波信号具有多径效应,信号通过反射、漫反射、衍射、绕射等 方式,在一些场景下,能够检测遮挡物体。大陆集团曾提到基于其 ARS430 毫米波 雷达的经验,这类遮挡车辆大约在 40%的场景中可以被发现。当然其探测遮挡物体 的性能表现也基于一些条件,如道路表面情况、前车的位置、以及被遮挡车辆的位 置等。而算法对于此类场景的探测尤为重要,华为在其 4D 毫米波雷达发布会上也 着重提到了这一点。
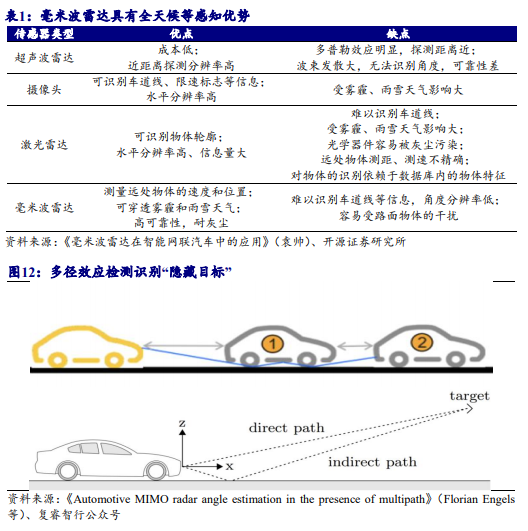
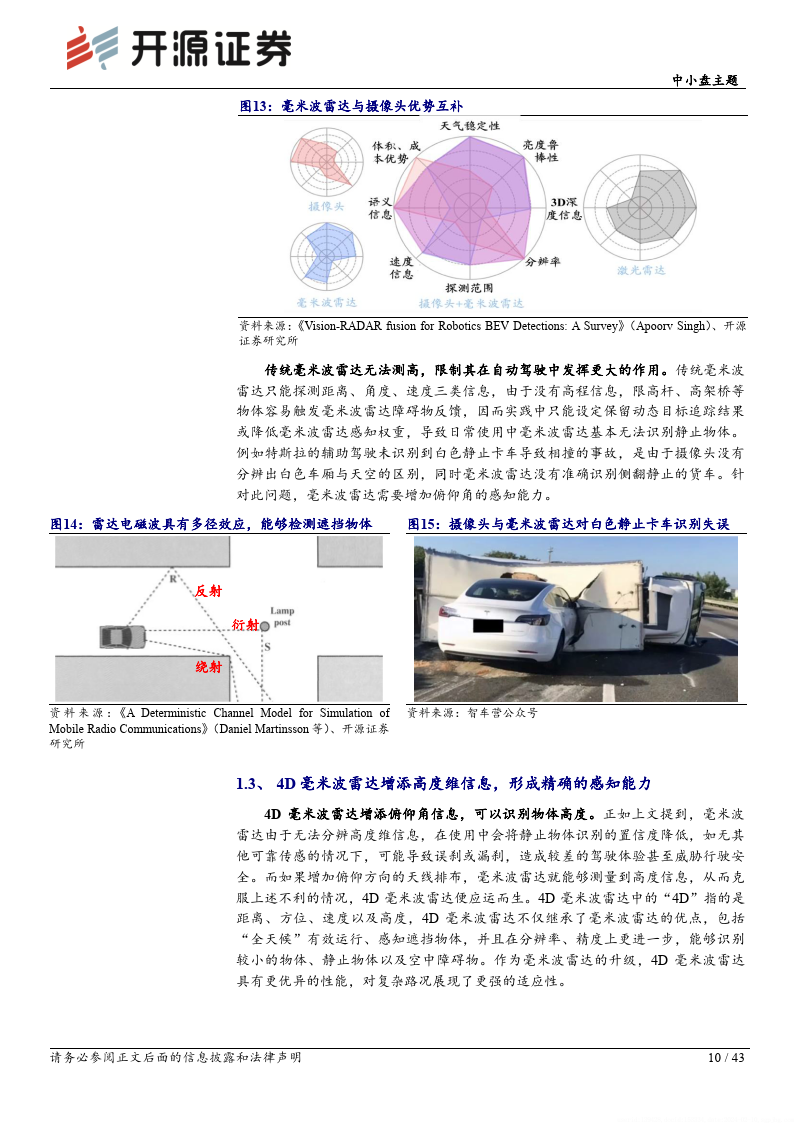
摄像头与毫米波雷达能够形成感知系统上的优势互补。摄像头是被动感知传感 器,具有成本低、易于集成、语义信息丰富等特点,并且摄像头是数据带宽最高的 车载传感器之一,可以提供高分辨率图像与实时视觉信息,但是摄像头容易受到恶 劣天气、眩光等环境的影响,没有精确的物体深度信息与速度信息。毫米波雷达在摄像头所不足的方面可以提供有效补充,两类传感器融合则能以较低的成本实现性 能更好的自动驾驶感知。

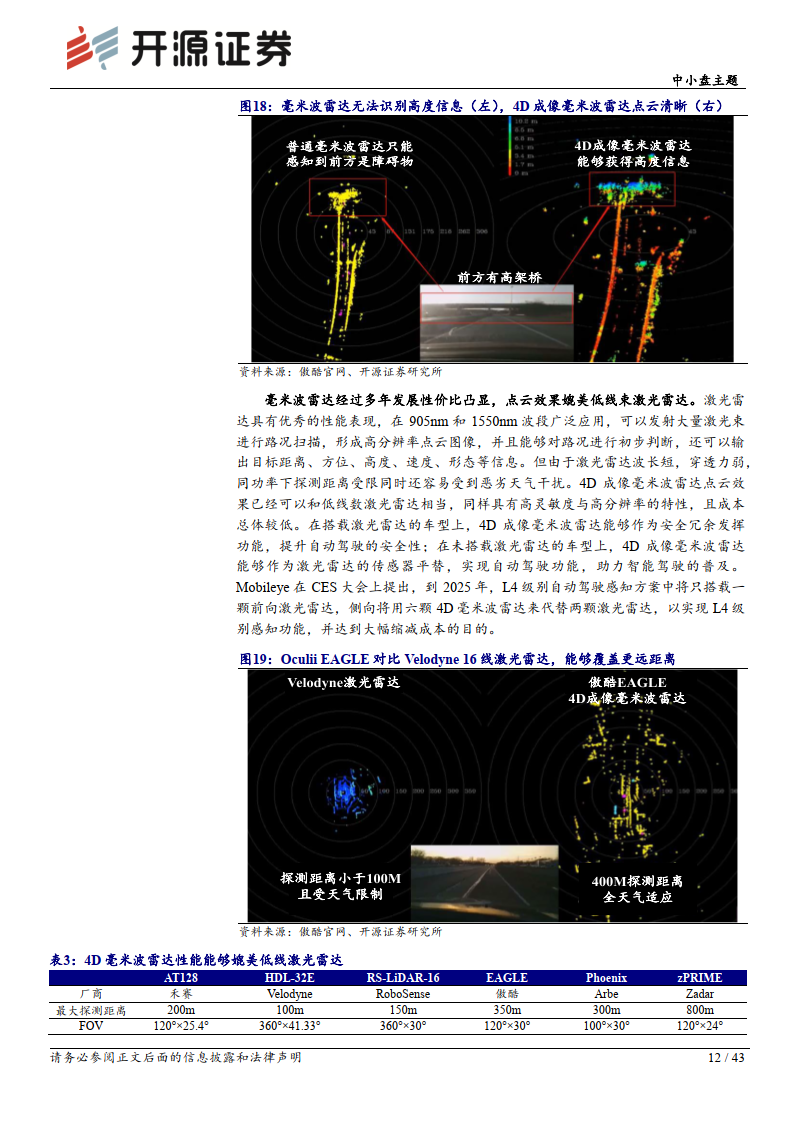
传统毫米波雷达无法测高,限制其在自动驾驶中发挥更大的作用。传统毫米波 雷达只能探测距离、角度、速度三类信息,由于没有高程信息,限高杆、高架桥等 物体容易触发毫米波雷达障碍物反馈,因而实践中只能设定保留动态目标追踪结果 或降低毫米波雷达感知权重,导致日常使用中毫米波雷达基本无法识别静止物体。 例如特斯拉的辅助驾驶未识别到白色静止卡车导致相撞的事故,是由于摄像头没有分辨出白色车厢与天空的区别,同时毫米波雷达没有准确识别侧翻静止的货车。针 对此问题,毫米波雷达需要增加俯仰角的感知能力。




报告共计:43页
这篇关于智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





