本文主要是介绍【DBC专题】-12-不同类型报文(应用/诊断/网管/测量标定)在DBC中配置,以及在Autosar各模块间的信号数据流向,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
点击返回「Autosar从入门到精通-实战篇」总目录
案例背景(共18页精讲):该篇博文将告诉您:
1)Autosar中,不同类型报文(App应用,UDS/OBD诊断,NM网络管理报文,XCP测量标定)的信号数据流向;
2)CAN DBC中,不同的Attribute属性决定不同类型报文(App应用,UDS/OBD诊断,NM网络管理报文,XCP测量标定)。
3)TechnicalReference-DbcRules-Vector文件下载,见下方链接:
TechnicalReference-DbcRules-Vector![]() https://download.csdn.net/download/qfmzhu/87580682
https://download.csdn.net/download/qfmzhu/87580682
目录
1 Autosar中不同类型报文(应用/诊断/网络管理/测量标定)的信号数据流向
1.1 普通APP应用报文信号数据流向
1.1.1 多路复用Multiplexer报文信号数据流向
1.2 UDS/OBD诊断报文信号数据流向
1.3 NM网络管理报文信号数据流向
1.4 XCP测量标定报文信号数据流向
2 CAN DBC中如何定义不同类型报文(应用/诊断/网络管理/测量标定)
3 如何制作一个Autosar工具能够识别的CAN DBC
3.1 节点的定义
3.2 普通App帧配置
3.2.1 普通App Tx发送帧配置
3.2.2 普通App Rx接收帧配置
3.3 UDS/OBD诊断帧配置
3.3.1 UDS/OBD诊断功能请求帧配置
3.3.2 UDS/OBD诊断物理请求帧配置
3.3.3 UDS/OBD诊断诊断响应帧配置
3.4 NM网络管理帧配置
3.4.1 NM网络管理发送帧配置
3.4.2 NM网络管理接收帧配置
3.5 XCP测量标定帧配置
3.5.1 XCP测量标定发送帧配置
3.5.2 XCP测量标定接收帧配置
3.6 附件:Autosar工具能够使用的Demo.dbc
4 摘录:Autosar工具中使用的CAN DBC常用属性
结尾
优质博文推荐阅读(单击下方链接,即可跳转):
Vector工具链
CAN Matrix DBC
CAN Matrix Arxml
<--返回「实战篇」博文-总目录-->
<--返回「Autosar从入门到精通-实战篇」专栏主页-->
1 Autosar中不同类型报文(应用/诊断/网络管理/测量标定)的信号数据流向
以经典CAN/CANFD通信为例,不同类型报文(应用/诊断/网络管理/测量标定)在Autosar BSW层中的信号数据流向,见图1-1。
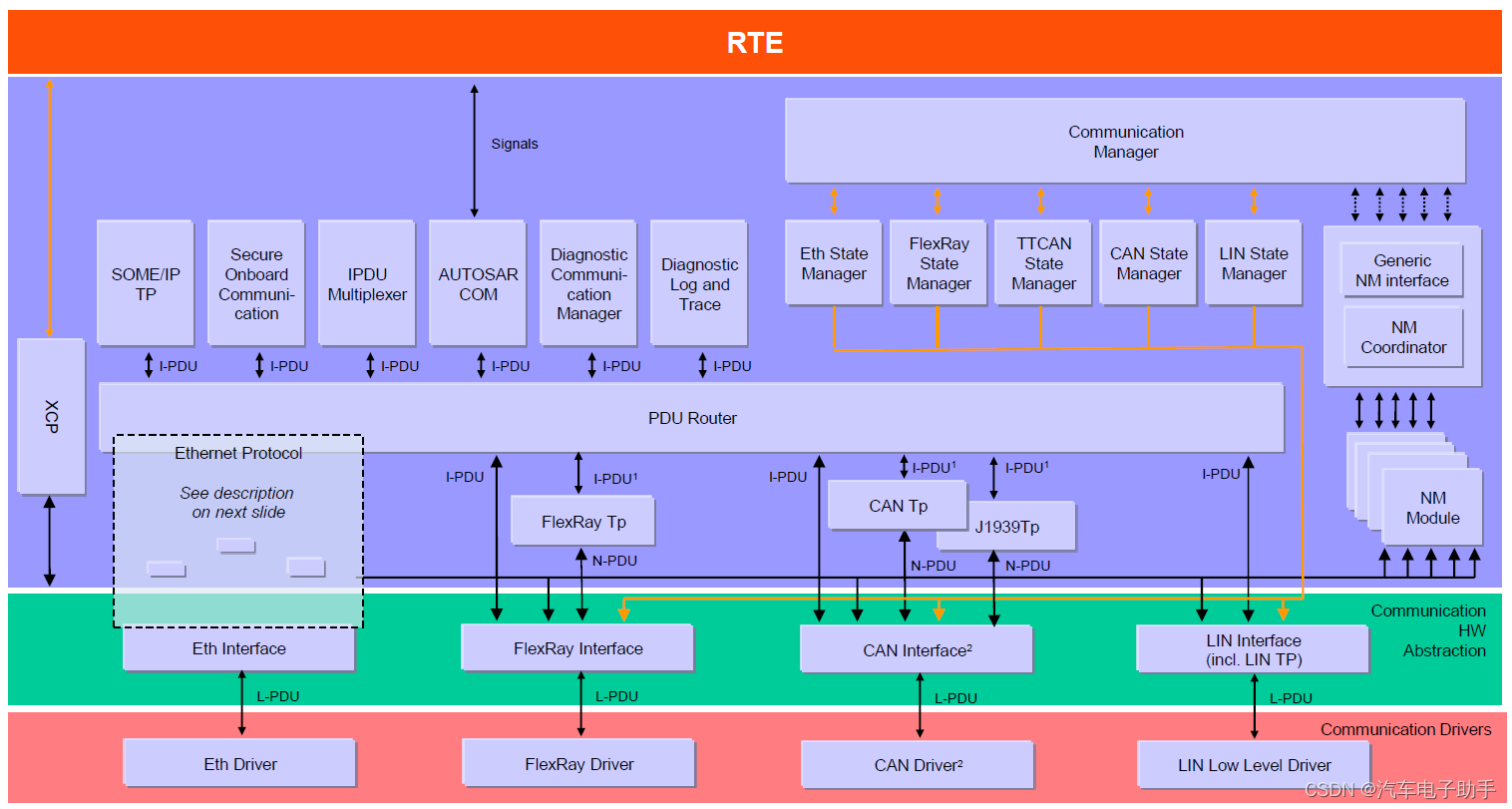
图1-1
COM:Communication
DCM: Diagnostic Communication Manager
Ipdum: IPDU Multiplexer
PduR:PDU Router
Nm: Network Management
CanTp: CAN Transport Layer
CanIf: CAN Interface
1.1 普通APP应用报文信号数据流向
如图1-1所述:
Rx 接收一帧普通的APP应用报文信号数据流向:CAN Driver – > CanIf -- > PduR -- > Com
Tx 发送一帧普通的APP应用报文信号数据流向:Com – > PduR – > CanIf – > CAN Driver
1.1.1 多路复用Multiplexer报文信号数据流向
如图1-2所述:
Rx 接收一帧多路复用Multiplexer报文信号数据流向:CAN Driver – > CanIf -- > PduR -- > Ipdum – > PduR -- > Com
Tx 发送一帧多路复用Multiplexer报文信号数据流向:Com – > PduR – > Ipdum – > PduR -- > CanIf – > CAN Driver

图1-2
1.2 UDS/OBD诊断报文信号数据流向
如图1-1所述:
Rx 接收一帧UDS/OBD诊断报文信号数据流向:CAN Driver – > CanIf -- > CanTp -- > PduR -- > Dcm
Tx 发送一帧UDS/OBD诊断报文信号数据流向:Dcm – > PduR – > CanTp -- > CanIf – > CAN Driver
1.3 NM网络管理报文信号数据流向
如图1-3所述:
Rx 接收一帧NM网络管理信号数据流向:CAN Driver – > CanIf -- > CanNm -- > PduR -- > Com
Tx 发送一帧NM网络管理信号数据流向:Com – > PduR – > CanNm -- > CanIf – > CAN Driver
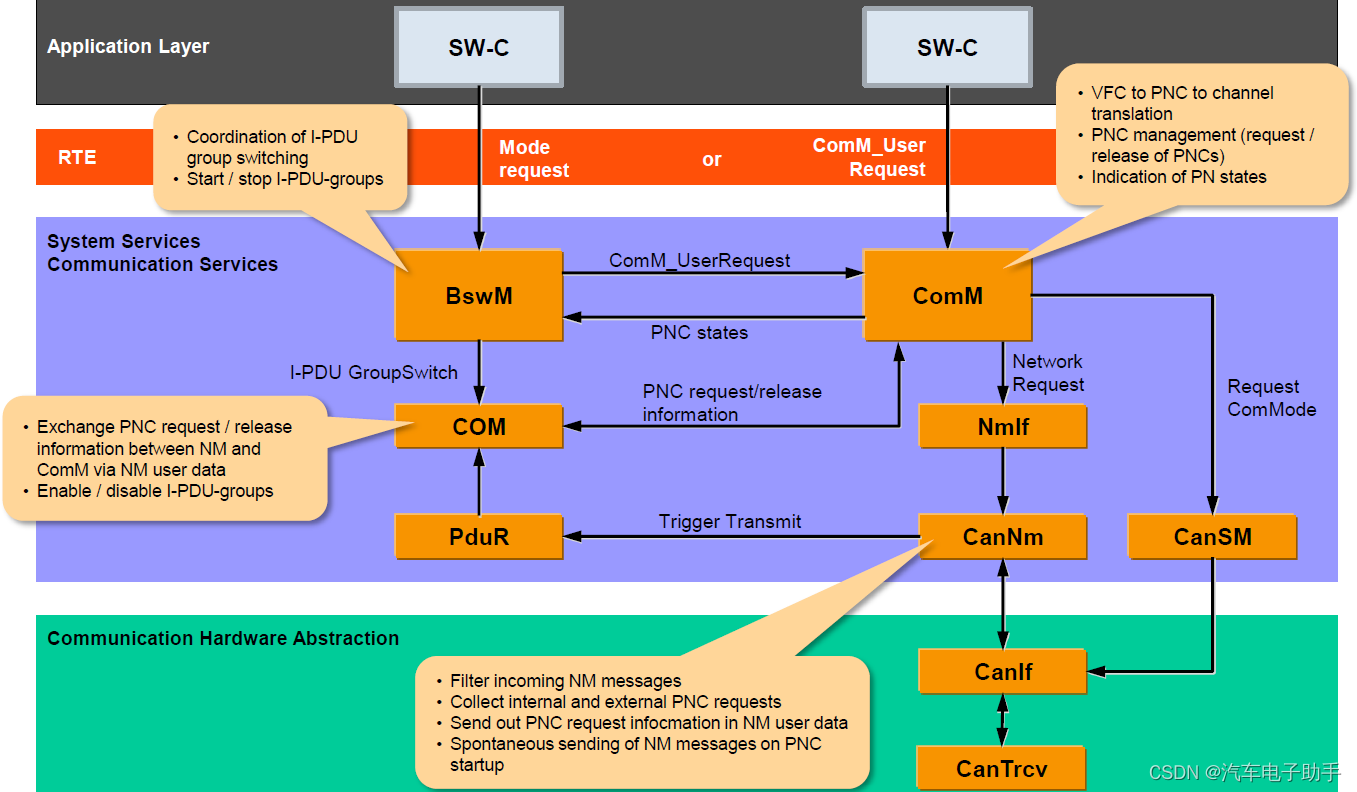
图1-3
1.4 XCP测量标定报文信号数据流向
如图1-1所述:
Rx 接收一帧XCP测量标定报文信号数据流向:CAN Driver – > CanIf -- > XCP
Tx 发送一帧XCP测量标定报文信号数据流向:XCP -- > CanIf – > CAN Driver
2 CAN DBC中如何定义不同类型报文(应用/诊断/网络管理/测量标定)
CAN DBC中,不同的Attribute属性定义,决定了不同类型的报文:APP应用报文,UDS/OBD诊断报文,NM网络管理报文,XCP测量标定报文。
Vector Davinci提供的《TechnicalReference_DbcRules_Vector.pdf》文档中,说明了CAN DBC文件中,不同类型报文的Attributes(GenMsgILSupport,DiagState,DiagRequest,DiagResponse,NmAsrMessage)定义,见下表。
| Attribute属性 | GenMsgILSupport | DiagState | DiagRequest | DiagResponse | NmAsrMessage |
| APP应用报文 | Yes | No | No | No | No |
| UDS/OBD诊断报文 | No | Yes/No | Yes/No | Yes/No | No |
| NM网络管理报文 | No | No | No | No | Yes |
| XCP测量标定报文 | No | No | No | No | No |
3 如何制作一个Autosar工具能够识别的CAN DBC
制作一个完整的CAN DBC,过程可参考博文“【DBC专题】-1-如何使用CANdb++ Editor创建并制作一个DBC![]() https://blog.csdn.net/qfmzhu/article/details/111403266”,第3.2~3.5章节摘录了message配置,需要重点关注的地方:发送节点,接收节点,属性设置差异。
https://blog.csdn.net/qfmzhu/article/details/111403266”,第3.2~3.5章节摘录了message配置,需要重点关注的地方:发送节点,接收节点,属性设置差异。
Autosar工具链导入该CAN DBC可参考博文:
【DaVinci Configurator专题】-2-将CAN 2.0或CANFD Matrix的Arxml/DBC文件导入到CFG![]() https://blog.csdn.net/qfmzhu/article/details/115032771
https://blog.csdn.net/qfmzhu/article/details/115032771
3.1 节点的定义
在Network nodes中,至少定义4个节点,见图3-1:
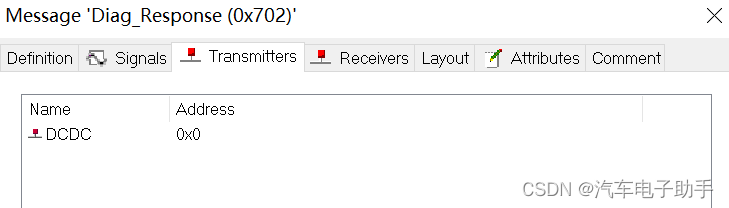
- 当前所在ECU的节点名称:默认为DCDC;
- 定义若干个该ECU的接收节点:以VCU为例,这些节点中存在NM帧发送节点;
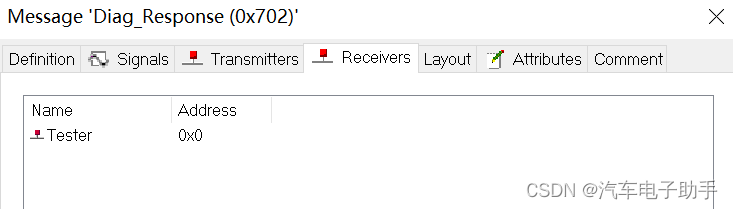
- 定义一个UDS/OBD诊断/测试仪节点:以Test为例。
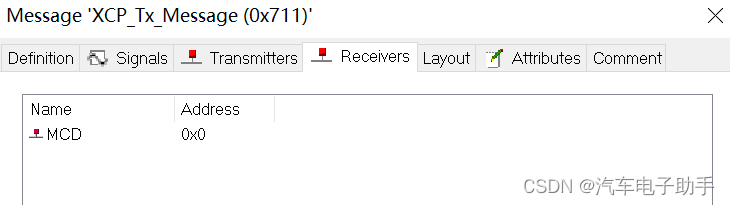
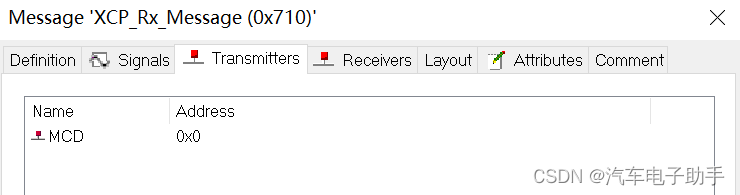
- 定义一个XCP测量标定节点:以MCD为例。
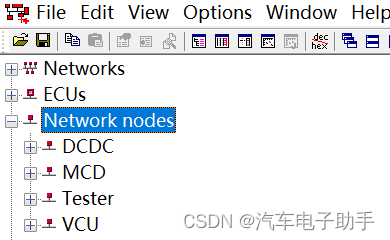
图3-1
3.2 普通App帧配置
3.2.1 普通App Tx发送帧配置

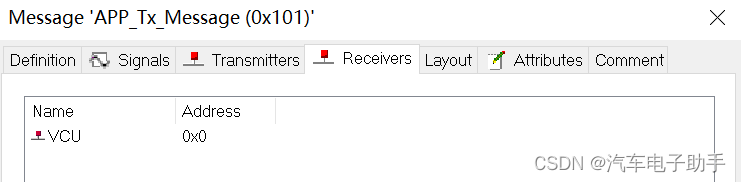

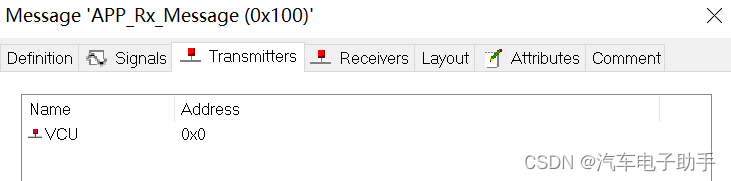
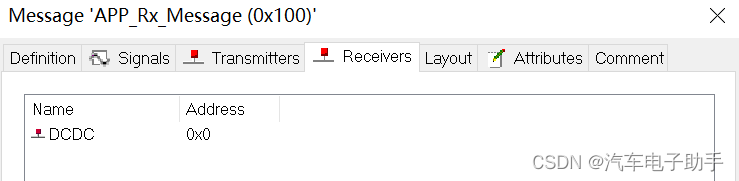
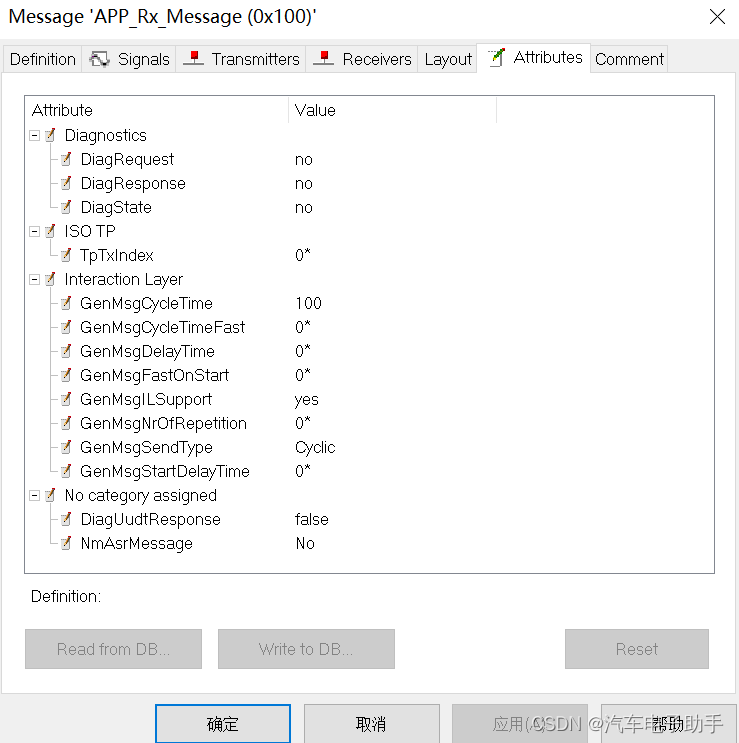
3.2.2 普通App Rx接收帧配置
3.3 UDS/OBD诊断帧配置
3.3.1 UDS/OBD诊断功能请求帧配置
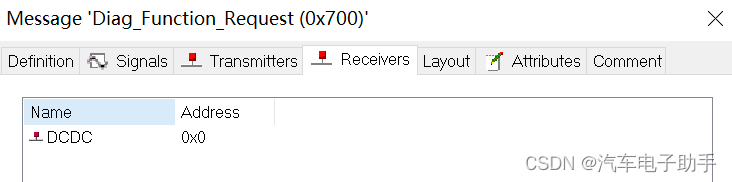
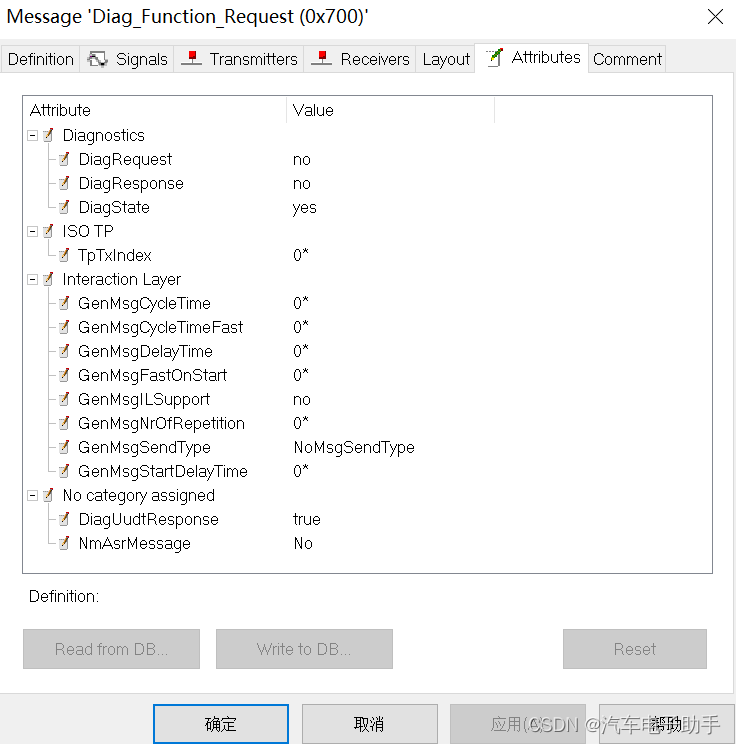
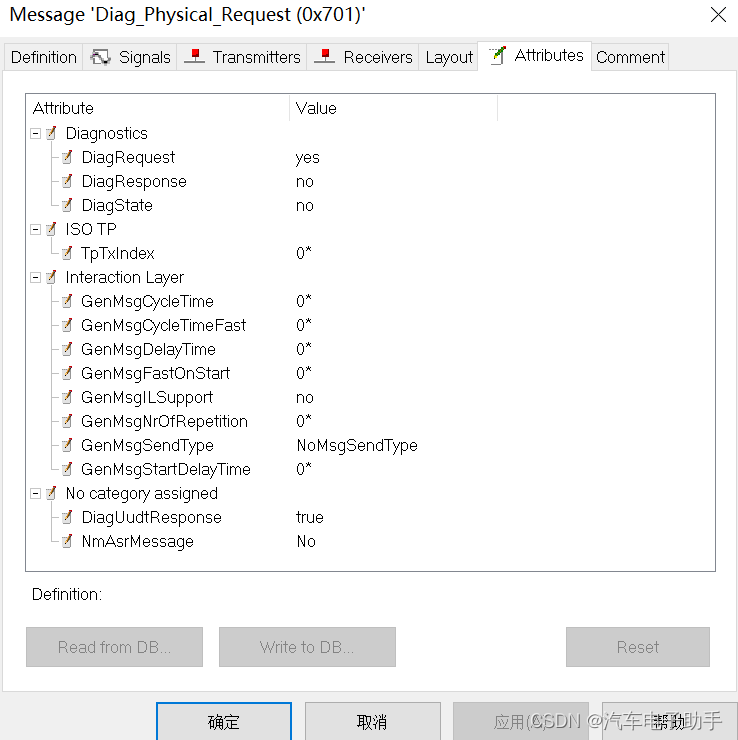
3.3.2 UDS/OBD诊断物理请求帧配置
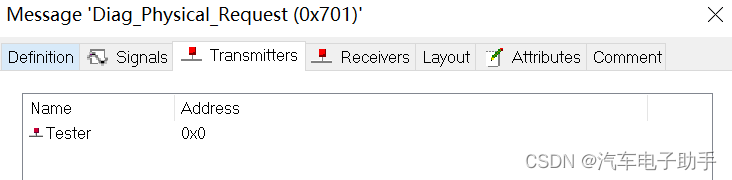
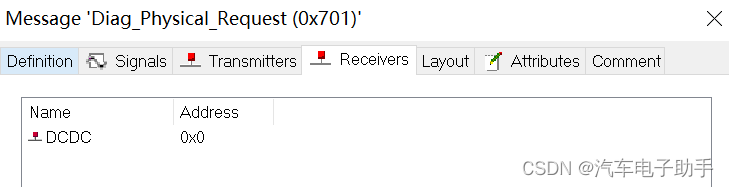
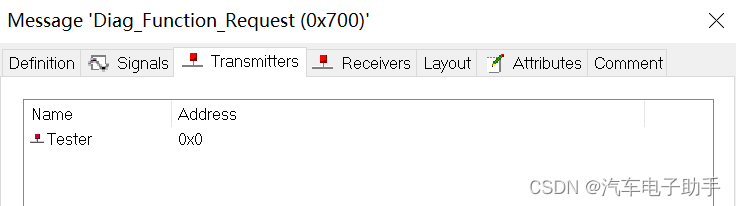
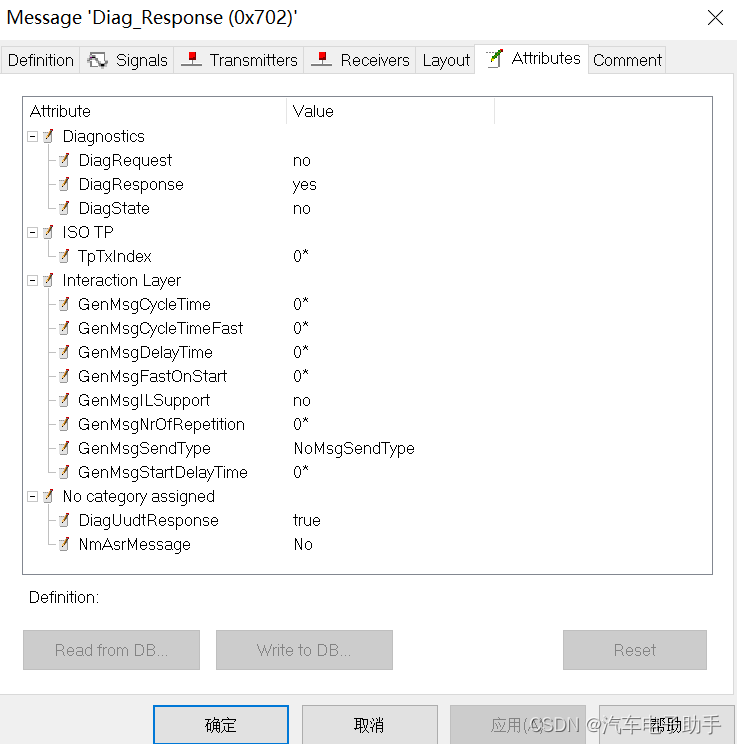
3.3.3 UDS/OBD诊断诊断响应帧配置
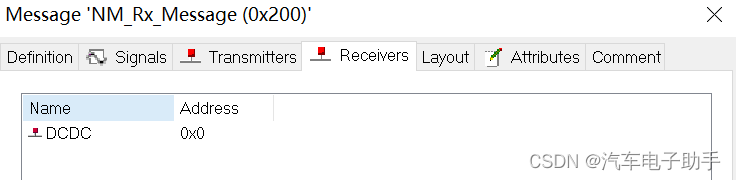
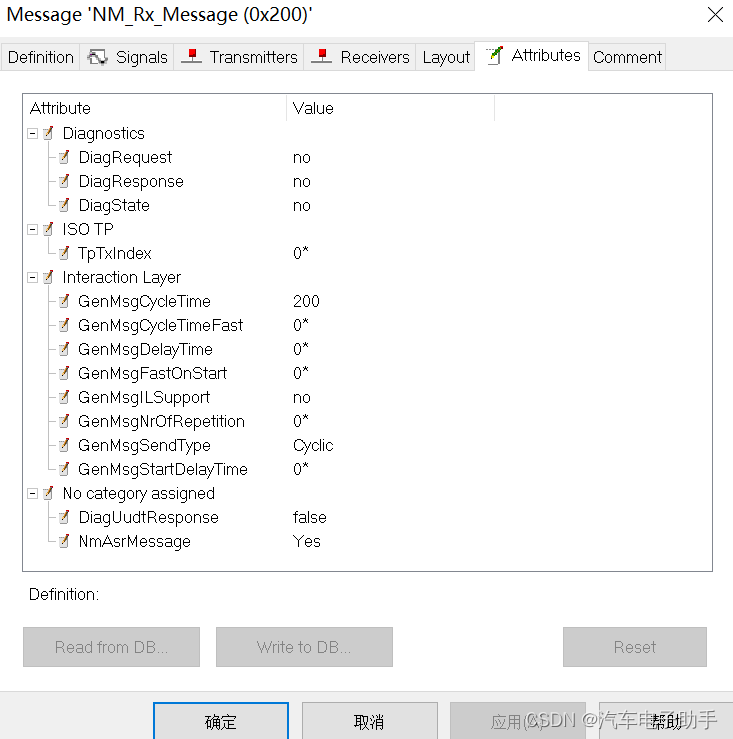
3.4 NM网络管理帧配置
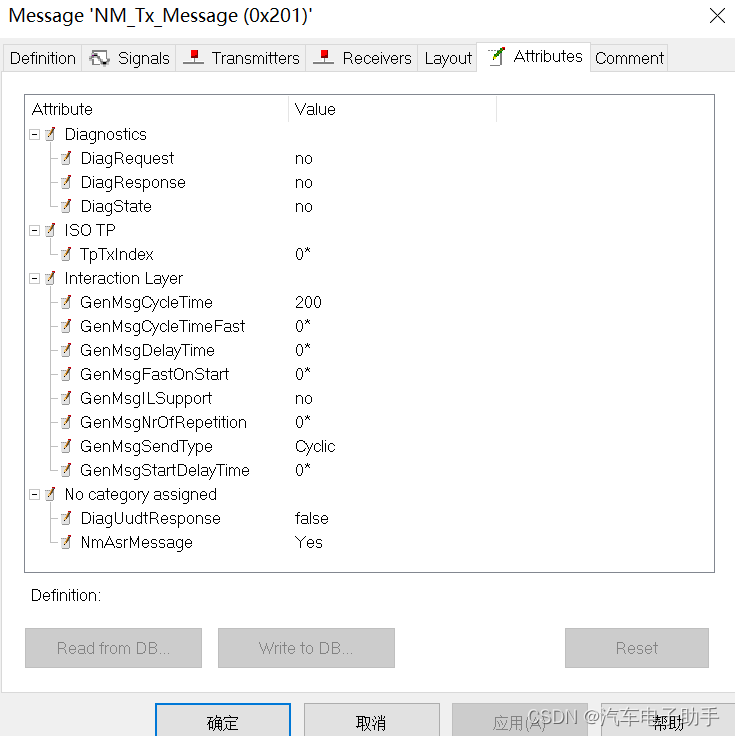
3.4.1 NM网络管理发送帧配置
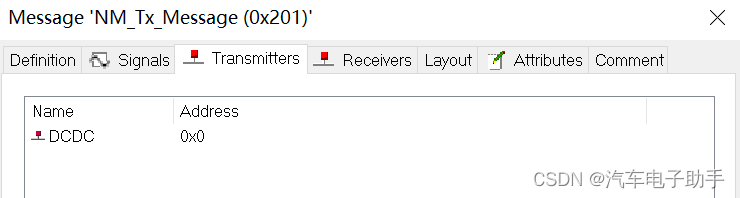
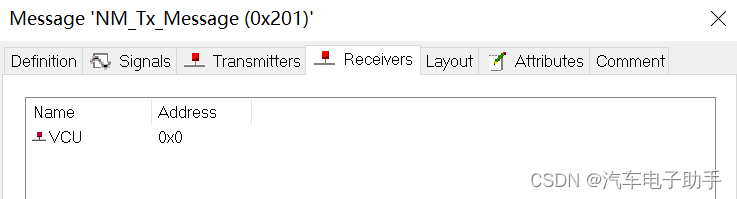
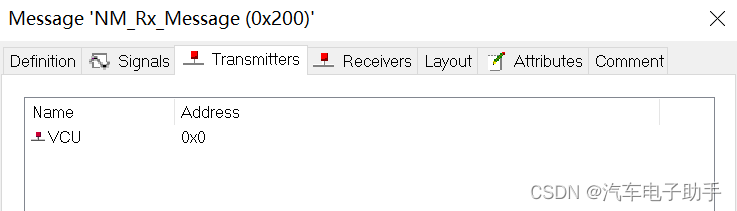
3.4.2 NM网络管理接收帧配置
3.5 XCP测量标定帧配置
3.5.1 XCP测量标定发送帧配置


3.5.2 XCP测量标定接收帧配置
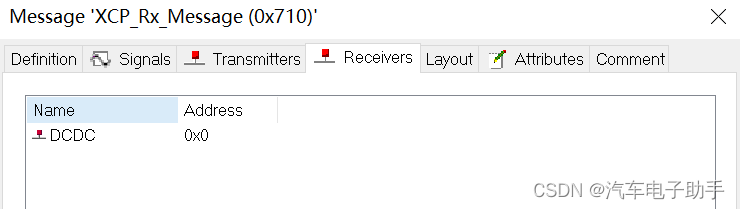
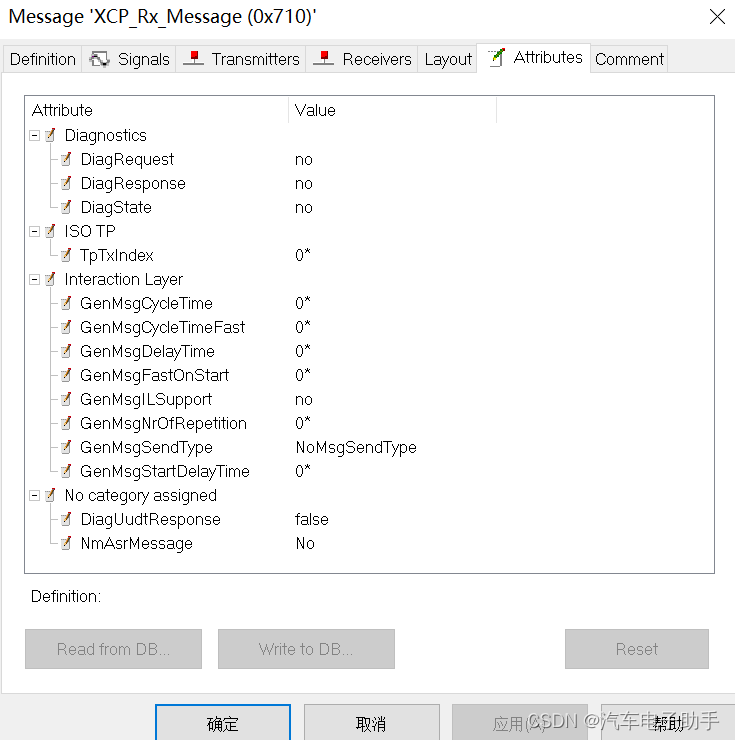
3.6 附件:Autosar工具能够使用的Demo.dbc
将以下内容复制到一个txt文件中,并保存,接着将文件后缀txt用dbc替换,这样可以快速得到这个demo.dbc文件。
VERSION ""NS_ : NS_DESC_CM_BA_DEF_BA_VAL_CAT_DEF_CAT_FILTERBA_DEF_DEF_EV_DATA_ENVVAR_DATA_SGTYPE_SGTYPE_VAL_BA_DEF_SGTYPE_BA_SGTYPE_SIG_TYPE_REF_VAL_TABLE_SIG_GROUP_SIG_VALTYPE_SIGTYPE_VALTYPE_BO_TX_BU_BA_DEF_REL_BA_REL_BA_DEF_DEF_REL_BU_SG_REL_BU_EV_REL_BU_BO_REL_SG_MUL_VAL_BS_:BU_: MCD Tester VCU DCDCBO_ 1809 XCP_Tx_Message: 8 DCDCSG_ DCDC_to_MCD_Resp : 7|64@0+ (1,0) [0|0] "" MCDBO_ 1808 XCP_Rx_Message: 8 MCDSG_ MCD_Req : 7|64@0+ (1,0) [0|0] "" DCDCBO_ 513 NM_Tx_Message: 8 DCDCSG_ NM_Tx_Message_Signal : 7|8@0+ (1,0) [0|0] "" VCUBO_ 512 NM_Rx_Message: 8 VCUSG_ NM_Rx_Message_Signal : 7|8@0+ (1,0) [0|0] "" DCDCBO_ 1794 Diag_Response: 8 DCDCSG_ DCDC_to_Tester_Phy_Resp : 7|64@0+ (1,0) [0|0] "" TesterBO_ 1793 Diag_Physical_Request: 8 TesterSG_ Tester_Phy_Req : 7|64@0+ (1,0) [0|0] "" DCDCBO_ 1792 Diag_Function_Request: 8 TesterSG_ Tester_Fun_Req : 7|64@0+ (1,0) [0|0] "" DCDCBO_ 256 APP_Rx_Message: 8 VCUSG_ APP_Rx_Message_Signal : 7|8@0+ (1,0) [0|0] "" DCDCBO_ 257 APP_Tx_Message: 8 DCDCSG_ APP_Tx_Message_Signal : 7|8@0+ (1,0) [0|0] "" VCUBA_DEF_ BU_ "NmStationAddress" INT 0 127;
BA_DEF_ "NmBaseAddress" HEX 1152 1279;
BA_DEF_ "Manufacturer" STRING ;
BA_DEF_ SG_ "GenSigInactiveValue" INT 0 2147483647;
BA_DEF_ SG_ "GenSigSendType" ENUM "Cyclic","OnWrite","OnWriteWithRepetition","OnChange","OnChangeWithRepetition","IfActive","IfActiveWithRepetition","NoSigSendType","OnChangeAndIfActive","OnChangeAndIfActiveWithRepetition","vector_leerstring";
BA_DEF_ SG_ "GenSigStartValue" INT 0 2147483647;
BA_DEF_ BO_ "DiagRequest" ENUM "no","yes";
BA_DEF_ BO_ "DiagResponse" ENUM "no","yes";
BA_DEF_ BO_ "DiagState" ENUM "no","yes";
BA_DEF_ BO_ "DiagUudtResponse" ENUM "false","true";
BA_DEF_ BO_ "NmAsrMessage" ENUM "No","Yes";
BA_DEF_ BO_ "GenMsgCycleTime" INT 0 65535;
BA_DEF_ BO_ "GenMsgCycleTimeFast" INT 0 65535;
BA_DEF_ BO_ "GenMsgDelayTime" INT 0 65535;
BA_DEF_ BO_ "GenMsgFastOnStart" INT 0 65535;
BA_DEF_ BO_ "GenMsgILSupport" ENUM "no","yes";
BA_DEF_ BO_ "GenMsgNrOfRepetition" INT 0 999;
BA_DEF_ BO_ "GenMsgSendType" ENUM "Cyclic","NotUsed","NotUsed","NotUsed","NotUsed","NotUsed","NotUsed","IfActive","NoMsgSendType";
BA_DEF_ BO_ "GenMsgStartDelayTime" INT 0 65535;
BA_DEF_ BO_ "TpTxIndex" INT 0 255;
BA_DEF_ "BusType" STRING ;
BA_DEF_ SG_ "GenSigTimeoutTime" INT 0 65535;
BA_DEF_DEF_ "NmStationAddress" 0;
BA_DEF_DEF_ "NmBaseAddress" 1152;
BA_DEF_DEF_ "Manufacturer" "Vector";
BA_DEF_DEF_ "GenSigInactiveValue" 0;
BA_DEF_DEF_ "GenSigSendType" "";
BA_DEF_DEF_ "GenSigStartValue" 0;
BA_DEF_DEF_ "DiagRequest" "";
BA_DEF_DEF_ "DiagResponse" "";
BA_DEF_DEF_ "DiagState" "";
BA_DEF_DEF_ "DiagUudtResponse" "";
BA_DEF_DEF_ "NmAsrMessage" "";
BA_DEF_DEF_ "GenMsgCycleTime" 0;
BA_DEF_DEF_ "GenMsgCycleTimeFast" 0;
BA_DEF_DEF_ "GenMsgDelayTime" 0;
BA_DEF_DEF_ "GenMsgFastOnStart" 0;
BA_DEF_DEF_ "GenMsgILSupport" "";
BA_DEF_DEF_ "GenMsgNrOfRepetition" 0;
BA_DEF_DEF_ "GenMsgSendType" "Cyclic";
BA_DEF_DEF_ "GenMsgStartDelayTime" 0;
BA_DEF_DEF_ "TpTxIndex" 0;
BA_DEF_DEF_ "BusType" "CAN";
BA_DEF_DEF_ "GenSigTimeoutTime" 0;
BA_ "DiagRequest" BO_ 1809 0;
BA_ "DiagResponse" BO_ 1809 0;
BA_ "DiagState" BO_ 1809 0;
BA_ "DiagUudtResponse" BO_ 1809 0;
BA_ "NmAsrMessage" BO_ 1809 0;
BA_ "GenMsgILSupport" BO_ 1809 0;
BA_ "GenMsgSendType" BO_ 1809 8;
BA_ "DiagRequest" BO_ 1808 0;
BA_ "DiagResponse" BO_ 1808 0;
BA_ "DiagState" BO_ 1808 0;
BA_ "DiagUudtResponse" BO_ 1808 0;
BA_ "NmAsrMessage" BO_ 1808 0;
BA_ "GenMsgILSupport" BO_ 1808 0;
BA_ "GenMsgSendType" BO_ 1808 8;
BA_ "DiagRequest" BO_ 513 0;
BA_ "DiagResponse" BO_ 513 0;
BA_ "DiagState" BO_ 513 0;
BA_ "DiagUudtResponse" BO_ 513 0;
BA_ "NmAsrMessage" BO_ 513 1;
BA_ "GenMsgCycleTime" BO_ 513 200;
BA_ "GenMsgILSupport" BO_ 513 0;
BA_ "GenMsgSendType" BO_ 513 0;
BA_ "DiagRequest" BO_ 512 0;
BA_ "DiagResponse" BO_ 512 0;
BA_ "DiagState" BO_ 512 0;
BA_ "DiagUudtResponse" BO_ 512 0;
BA_ "NmAsrMessage" BO_ 512 1;
BA_ "GenMsgCycleTime" BO_ 512 200;
BA_ "GenMsgILSupport" BO_ 512 0;
BA_ "GenMsgSendType" BO_ 512 0;
BA_ "DiagRequest" BO_ 1794 0;
BA_ "DiagResponse" BO_ 1794 1;
BA_ "DiagState" BO_ 1794 0;
BA_ "DiagUudtResponse" BO_ 1794 1;
BA_ "NmAsrMessage" BO_ 1794 0;
BA_ "GenMsgILSupport" BO_ 1794 0;
BA_ "GenMsgSendType" BO_ 1794 8;
BA_ "DiagRequest" BO_ 1793 1;
BA_ "DiagResponse" BO_ 1793 0;
BA_ "DiagState" BO_ 1793 0;
BA_ "DiagUudtResponse" BO_ 1793 1;
BA_ "NmAsrMessage" BO_ 1793 0;
BA_ "GenMsgILSupport" BO_ 1793 0;
BA_ "GenMsgSendType" BO_ 1793 8;
BA_ "DiagRequest" BO_ 1792 0;
BA_ "DiagResponse" BO_ 1792 0;
BA_ "DiagState" BO_ 1792 1;
BA_ "DiagUudtResponse" BO_ 1792 1;
BA_ "NmAsrMessage" BO_ 1792 0;
BA_ "GenMsgILSupport" BO_ 1792 0;
BA_ "GenMsgSendType" BO_ 1792 8;
BA_ "DiagRequest" BO_ 256 0;
BA_ "DiagResponse" BO_ 256 0;
BA_ "DiagState" BO_ 256 0;
BA_ "DiagUudtResponse" BO_ 256 0;
BA_ "NmAsrMessage" BO_ 256 0;
BA_ "GenMsgCycleTime" BO_ 256 100;
BA_ "GenMsgILSupport" BO_ 256 1;
BA_ "GenMsgSendType" BO_ 256 0;
BA_ "GenMsgCycleTime" BO_ 257 100;
BA_ "DiagRequest" BO_ 257 0;
BA_ "DiagResponse" BO_ 257 0;
BA_ "DiagState" BO_ 257 0;
BA_ "DiagUudtResponse" BO_ 257 0;
BA_ "NmAsrMessage" BO_ 257 0;
BA_ "GenMsgCycleTimeFast" BO_ 257 20;
BA_ "GenMsgDelayTime" BO_ 257 10;
BA_ "GenMsgILSupport" BO_ 257 1;
BA_ "GenMsgNrOfRepetition" BO_ 257 3;
BA_ "GenMsgSendType" BO_ 257 7;
BA_ "GenMsgStartDelayTime" BO_ 257 10;
4 摘录:Autosar工具中使用的CAN DBC常用属性
| Attribute Name | Object Type | Value Type | Values and Ranges (Bold = default) | Description |
| Manufacturer | Network | String | Vector | 表示OEM。value必须是 " Vector "。 |
| BusType | Network | String | CAN CAN FD | 定义CAN-2.0和CAN-FD网络。如果至少有一个CAN-FD报文,则必须设置为 "CAN FD"。 |
| VFrameFormat | Message | Enum | CAN Standard CAN Extended CAN FD Standard CAN FD Extended | 表示CAN报文的种类。这个属性对每个报文都是可用的,在属性定义中没有声明。它的显示文本是 "ID-Format "或 "Type"。 |
| GenMsgILSupport | Message | Enum | No: 0 Yes: 1 | 表示一个消息将由COM处理。如果选择 "yes",该信息将由COM处理,否则不处理。 |
| GenMsgSendType | Message | Enum | Cyclic: 0, NotUsed, NotUsed, NotUsed, NotUsed, NotUsed, NotUsed, NotUsed, NoMsgSendType: 8 | 指定I-PDU的Tx行为。可以与任何类型的GenSigSendType相结合。 |
| GenSigSendType | Signal | Enum | Cyclic: 0, OnWrite: 1, OnWriteWithRepetition: 2, OnChange: 3, OnChangeWithRepetition: 4, NotUsed, NotUsed, NoSigSendType: 7 | 指定一个信号的Tx行为。OnChange仅支持<=4 Byte的信号。 请注意:带重复的发送类型和不带重复的发送类型的组合将导致信息在任何时候都是带重复的发送。 |
| GenMsgCycleTime | Message | Integer | 0..65535 | 每次循环发送信息之间的时间,单位是毫秒。 |
| GenMsgCycleTimeFast | Message | Integer | 0..65535 | 如果至少有一个IfActiveSignal的默认值不同,则每次循环发送消息之间的时间(ms)。 也适用于有重复的消息(即GenMsgNrOfRepetition > 0)。每次重复的时间间隔。 |
| GenSigStartValue | Signal | Integer Float | 0..2147483647 | 这个值是信号的默认值。 字符串值类型可以表示十六进制和整数值。 |
| GenSigInactiveValue | Signal | Integer | 0..2147483647 | 表示信号的无效值。 |
| GenMsgDelayTime | Message | Integer | 0..65535 | 这是具有相同标识符的不同信息发送之间的最小时间,单位是ms。 |
| GenMsgStartDelayTime | Message | Integer | 0..65535 | 这定义了Com_IpduGroupStart和这个I-PDU的循环部分的第一次发送之间的时间,单位是ms。 |
| GenMsgNrOfRepetition | Message | Integer | 0..255 | 在一个初始发送请求之后的发送重复次数。重复之间的时间必须使用dbc属性GenMsgCycleTimeFast来定义。 |
| GenSigTimeoutTime_<Ecu> | Signal | Integer | 0..65535 | 用于特定节点收到的该信号的超时时间(ms)。 如果为一个消息配置了不同的GenSigTimeoutTime值,并且没有使用更新位,那么最低的超时时间(最强的定义)被用于超时监测。 必须为每个接收此信号的ECU提供一个专门的属性定义(GenSigTimeoutTime_<Ecu>)。 |
| NmAsrMessage | Message | Enum | No = 0, Yes = 1 | 该属性定义了相应的消息是否是AUTOSAR NM消息 |
| DiagState | Message | Enum | No = 0, Yes = 1 | 设置为 "yes",用于 > Functional (UDS) request CanTp将使用Normal addressing。 |
| DiagRequest | Message | Enum | No = 0, Yes = 1 | 设置为 "yes",用于 > Physical Request CanTp将使用Normal addressing。 |
| DiagResponse | Message | Enum | No = 0, Yes = 1 | 设置为 "是",用于。 > Physical Response CanTp将使用Normal addressing。 |
<--返回「实战篇」博文-总目录-->
<--返回「Autosar从入门到精通-实战篇」专栏主页-->
<--返回「个人博客」首页-->
结尾
获取更多“汽车电子资讯”和“工具链使用”,
请关注CSDN博客“汽车电子助手”,做您的好助手。
这篇关于【DBC专题】-12-不同类型报文(应用/诊断/网管/测量标定)在DBC中配置,以及在Autosar各模块间的信号数据流向的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







