本文主要是介绍Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks----论文笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、为什么提出Faster R-CNN
Faster R-CNN的前身Fast R-CNN能达到实时检测,如果不考虑它用selective search计算region proposal所花时间的话。为此作者提出了Region Proposal Network(RPN),该深度网络通过共享卷积网络,使计算region proposal的时间几乎可以忽略不计(10 ms/图)!
二、Faster R-CNN框架 = Fast R-CNN + RPN(取代selective search)
三、RPN结构
1)输入: 一张图像,输出: 多个矩形object proposal 。
注:每个object proposal都有objectness score,衡量此object proposal有多大程度上是一个物体。
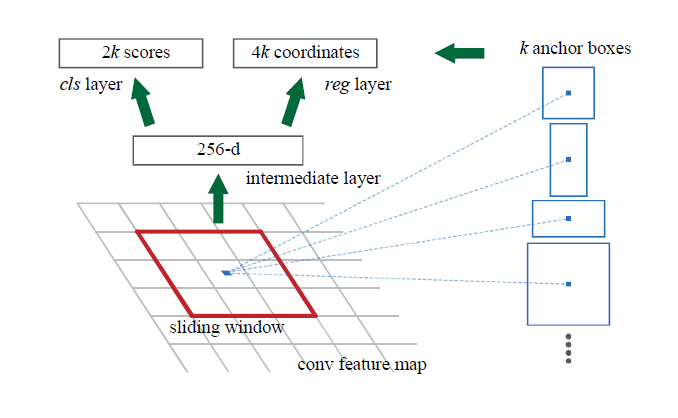
2)输入图像经过前面多个共享的卷积层,至最后一个共享卷积层输出的conv feature map,才算刚到RPN网络的开始。
注:conv feature map有好多张。
3)RPN与conv feature map上滑动的 n×n 窗口全连接,每个窗口映射到一个固定长度的低维向量(图示中是256维)。
4)此向量再分别输入两个全连接层:cls layer和reg layer。
注:在每个窗口位置,会预测k个(文中k=9)region proposal。所以 cls layer输出2k个score来衡量这k个region proposal分别有多大程度属于物体,而reg layer输出4k维来定位(中心坐标、长、宽)各个box 。
5)以上只是一个窗口产生的box,一张图像一般会有2k左右的box,也就有相应数量的感兴趣图像区域(RoI)输入到fast R-CNN框架中。
三、Faster R-CNN的优点
1)替代掉费时的selective search方法,速度提高了。
2)能与Fast R-CNN共享一部分卷积层,计算效率(速度)提高了。
3)RPN产生的region proposal质量高,准确率(mAP)也提高了。
四、Faster R-CNN的缺点
1)文中采用的联合优化方法(joint optimizing)应该有更好的方法。
2)NPR产生的在图像边缘的region proposal信息被丢弃了。
五、Faster R-CNN的补充
联合优化方法。
1)用在
ImageNet上训练好的模型初始化网络,然后微调网络以适用产生候选区域(region proposal)任务。2)利用第一步训练好的
RPN产生的proposal,Fast R-CNN训练一个独立的检测网络,该检测网络也是用在ImageNet上训练好的模型初始化的。注:到目前两个网络还没有共享卷积层。
3)用检测网络初始化
RPN训练网络,但固定共有卷积层,只微调RPN网络独有的层。4)保持共有的卷积层固定,微调
Fast R-CNN网络的fc层。注:至此,两个网络便共享了同样的卷积层,形成了一个统一的网络 。
这篇关于Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks----论文笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


