本文主要是介绍(2)(2.11) RFD900,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
前言
1 概述
2 主要功能
3 状态LED指示灯
4 接口
5 使用Mission Planner进行配置
6 支持不同国家/地区
7 讨论论坛
前言
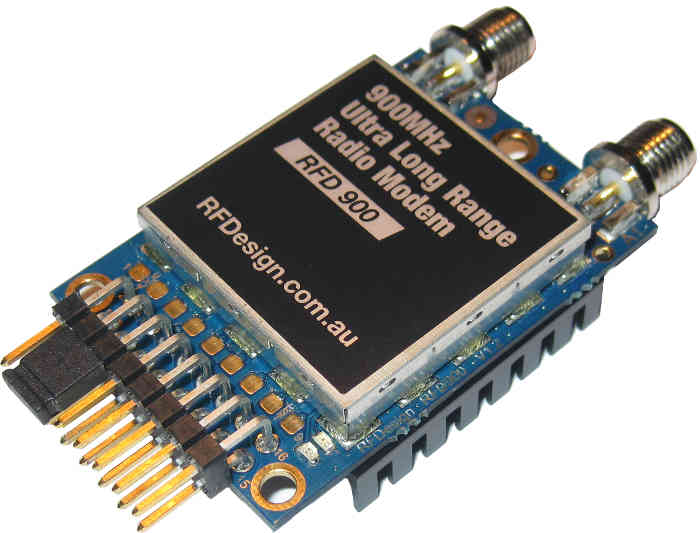
RFD900 无线电调制解调器是一款高功率 900Mhz ISM 波段无线电调制解调器,设计用于远距离串行通信。据报道,其通信距离可达 15 千米,甚至更高(15km and much higher have been reported)。
!Warning
许多常见的自动驾驶仪都有遥测端口电流限制,无法直接为 RFD900 无线电设备提供全发射功率。你应从外部为大功率无线电供电,或将其最大发射功率限制在可接受的水平。所有常用自动驾驶仪都应能处理 20dBm 的发射功率。有关每个遥测端口的详细功率规格,请参阅特定自动驾驶仪的手册。要设置发射 (TX) 功率,请参阅使用任务计划器配置遥测无线电(Configuring a Telemetry Radio using Mission Planner)。
1 概述
硬件是闭源的,但软件是开放的(software is open),并且基于在 SiK 无线电设备(SiK Radio)上运行的相同软件,这意味着配置和设置极为相似,这些无线电设备甚至可以与 900Mhz SiK 无线电设备配对使用(例如,你可以选择在地面使用一台 RFD900,在飞机上使用一台 SiK 无线电设备)。
可用频率:
- 868Mhz ISM for EU area
- 900Mhz ISM for US area
用户既可以单独购买无线电调制解调器、天线和电缆,也可以购买现成的遥测设备(如下图所示)。
可提供单独的无线电和天线:
- RFDesign Store, 900Mhz
- RFDesign Store, 868Mhz
- ProfiCNC Store
现成套件
Bask Aerospace
Bask Aerospace 提供可与所有 RFDesign 调制解调器配合使用的 AeroLink 系列产品。它们提供两种不同的变体,可满足地面和空中无线电的需求。
- AeroLink Base
- AeroLink RFD Adapter Board
AeroLink RFD 适配器板可按照上述建议,轻松地通过单独的 5V BEC 为 RFD 调制解调器供电。
ProfiCNC
- ProfiCNC Store
2 主要功能
- 远距离 > 40 千米,取决于天线和 GCS 设置;
- 2 x RP-SMA 射频连接器,分集切换;
- 1瓦(+30dBm)发射功率;
- 发射低通滤波器;
- > 20dB 低噪声放大器;
- 接收 SAW 滤波器;
- 无源前端带通滤波器;
- 开源固件/工具,可现场升级,易于配置;
- 体积小、重量轻;
- 与 3DR / Hope-RF 无线电模块兼容;
- 可在澳大利亚、加拿大、美国和新西兰免费使用。
3 状态LED指示灯
无线电有两个 LED 状态指示灯,一个红色,一个绿色。不同 LED 状态的含义如下:
- 绿色 LED 灯闪烁 - 正在搜索另一部无线电设备;
- 绿色 LED 灯常亮 - 已与另一台无线电设备建立连接;
- 红色 LED 灯闪烁 - 传输数据;
- 红色 LED 灯常亮 - 进入固件更新模式。
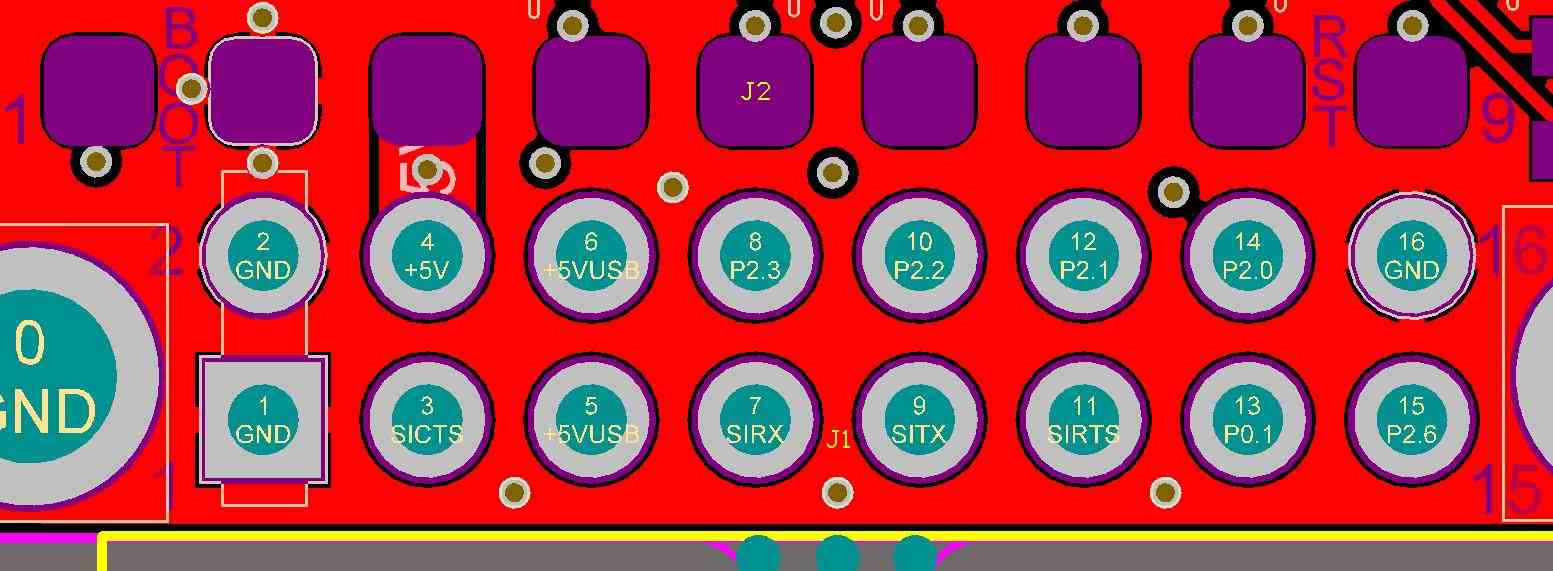
4 接口
- 射频:2 x RP-SMA 连接器;
- 串行:逻辑电平 RS232(标称电压 +3.3v,容许电压 +5v);
- 电源:+5V,~800mA 最大峰值(最大发射功率时);
- GPIO:6 个通用 IO(数字、ADC、PWM 功能);
- 连接方式如下:
5 使用Mission Planner进行配置
许多用户不需要配置无线电!但当你与他人共同使用飞行器时,你可能需要配置无线电信道(Net ID)。
Mission Planner支持使用简单的图形用户界面配置无线电设备。更多信息,请参阅使用任务规划器配置遥测无线电(Configuring a Telemetry Radio using Mission Planner)。
6 支持不同国家/地区
请务必按照所在地区/国家对频率、跳频信道和功率水平的规定配置无线电设备。有关无线电/地区频率范围和设置的信息,请参阅:
Telemetry Radio Regional Regulations.
7 讨论论坛
讨论这些无线电(包括设置问题)的最佳场所是 ArduPilot 的硬件讨论区(ArduPilot’s hardware discussion forums)。
这篇关于(2)(2.11) RFD900的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!

![[C++] 小游戏 斗破苍穹 2.11.6 版本 zty出品](/front/images/it_default.jpg)