本文主要是介绍第18届全国大学生智能汽车竞赛四轮车开源讲解【3】--边线提取,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
开源汇总写在下面
第18届全国大学生智能汽车竞赛四轮车开源讲解_Joshua.X的博客-CSDN博客
一、巡线/找边界
当摄像头成功获取一帧图像,并且预处理(二值化)之后,我们最重要的事情就是获取赛道信息。其中最基本的就是赛道编边界信息,左边,右边,中线等基础数据。
事先声明,没有那种算法是完美的,只要算法能够得到足够多想要的信息,那么他就是好算法。
不同算法之间没有优劣之分,多少国赛选手仍跑着最简单的算法,这并不影响什么。
1.(双)最长白列
首先介绍我使用的(双)最长白列法。
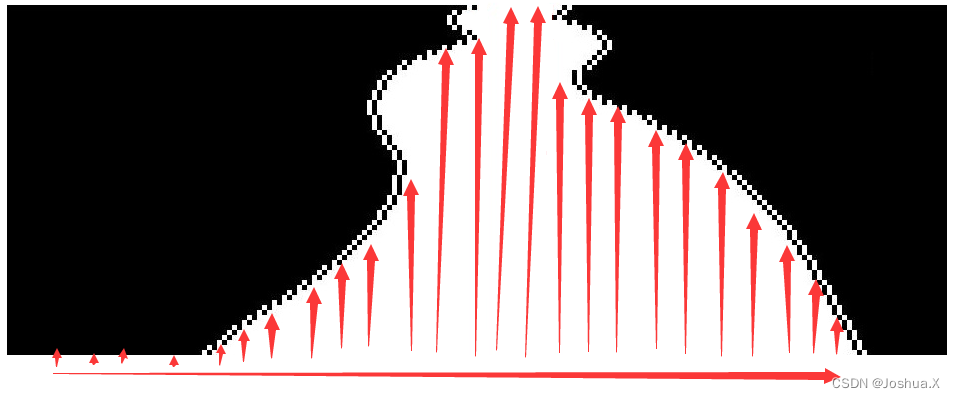
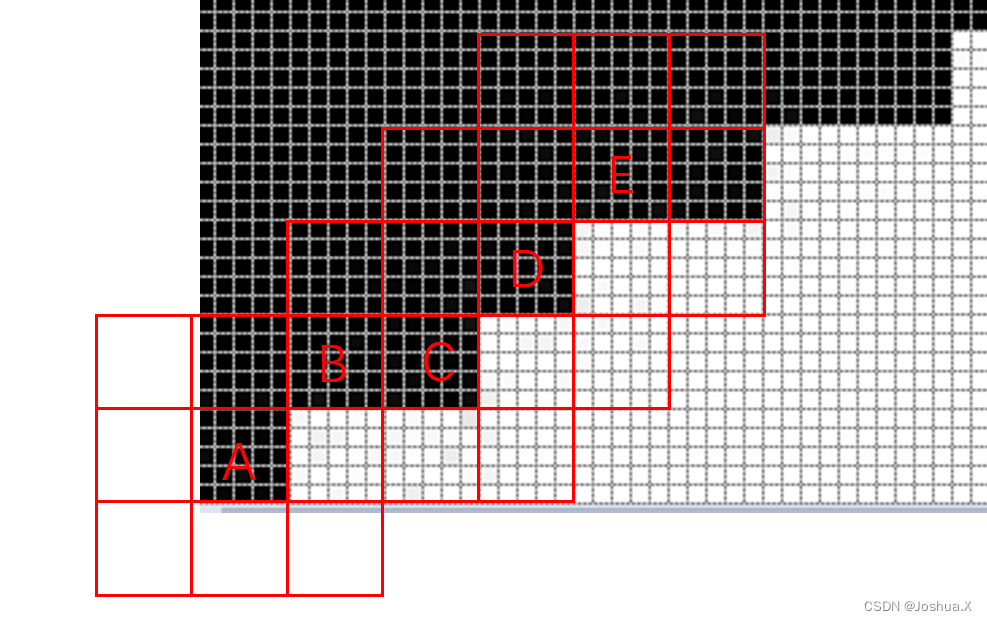
首先获取到一张二值化图像,那么我先从最下面一列,对于每一列向上寻找白点,同时计数,遇到停止黑点就停止。
示意图如下:
最长白列寻找代码如下
volatile int White_Column[MT9V03X_W];//每列白列长度//从左到右,从下往上,遍历全图记录范围内的每一列白点数量
for (j =start_column; j<=end_column; j++)
{for (i = MT9V03X_H - 1; i >= 0; i--){if(image_two_value[i][j] == IMG_BLACK)break;elseWhite_Column[j]++;}
}这样我们就得到了每一列连续白点的个数分布直方数据。
随后,从左到右寻找白点数量最多的一列;同样的,从右到左也寻找白点数最多的一列。
有些同学可能会疑惑,既然是最多,那么只有一个,为什么要从左往右找,再从右往左找呢?
这其实不矛盾,同样是最多,有可能都是整幅图像的高,但是位置有可能一不样。参考上方的图。
参考代码如下:
//从左到右找左边最长白列Longest_White_Column_Left[0] =0;for(i=start_column;i<=end_column;i++){if (Longest_White_Column_Left[0] < White_Column[i])//找最长的那一列{Longest_White_Column_Left[0] = White_Column[i];//【0】是白列长度Longest_White_Column_Left[1] = i; //【1】是下标,第j列}}//从右到左找右左边最长白列Longest_White_Column_Right[0] = 0;//【0】是白列长度for(i=end_column;i>=start_column;i--)//从右往左,注意条件,找到左边最长白列位置就可以停了{if (Longest_White_Column_Right[0] < White_Column[i])//找最长的那一列{Longest_White_Column_Right[0] = White_Column[i];//【0】是白列长度Longest_White_Column_Right[1] = i; //【1】是下标,第j列}}到这里我们已经找到了左最长白列,右最长白列,这两个值理论上是一样的,都是规定范围内的最长白列的长度值。
这个值还有一个名字,叫搜索截止行,做元素判断时非常有用,因为他代表了我们的视野,最长白列越长,说明我们看到越远,我们面前越有可能是直道,反之面前大概率是弯道。
Search_Stop_Line = Longest_White_Column_Left[0];//搜索截止行选取左或者右区别不大,他们两个理论上是一样的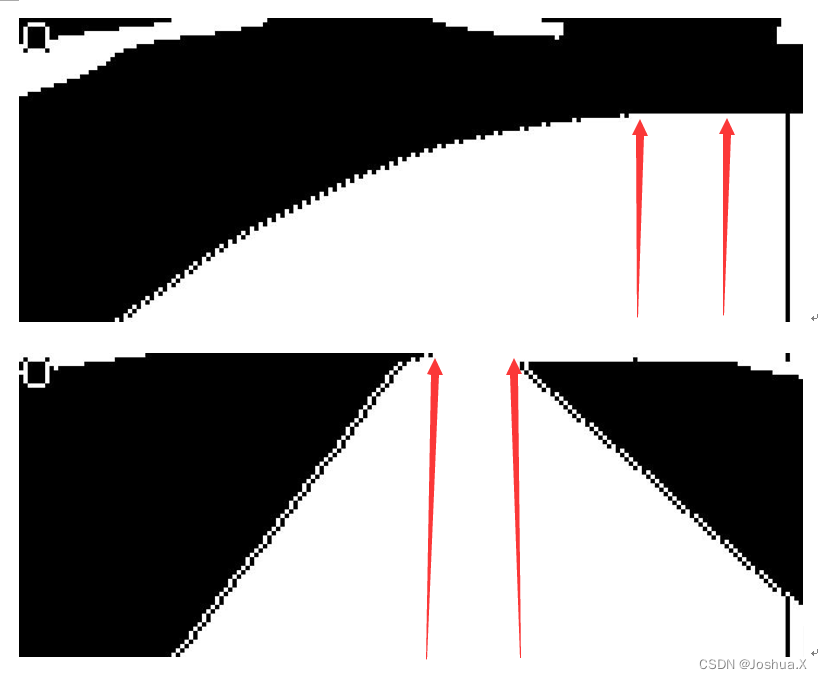
接下来就可以找边界了,从图像最下一行开始,到截止行结束。
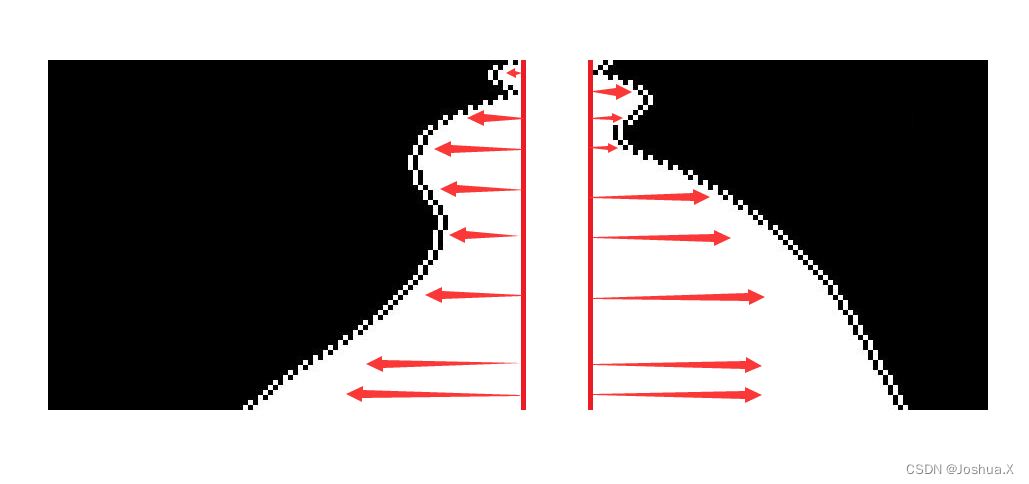
从左最长白列向左找,找到"黑黑白",即白点为左边界;
从右最长白列向右找,找到“白黑黑”,即白点为右边界。
当找到图像的边界仍然没有找到赛道边界,认为丢线,将屏幕边界放到赛道边界。如上图右下角即为丢线。
参考代码如下:
//相关数据使用前清零Longest_White_Column_Left[0] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Left[1] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Right[0] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Right[1] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列for (i = MT9V03X_H - 1; i >=MT9V03X_H-Search_Stop_Line; i--)//常规巡线{//从最下面一行,访问到我的有效是视野行for (j = Longest_White_Column_Right[1]; j <= MT9V03X_W - 1 - 2; j++){if (image_two_value[i][j] ==IMG_WHITE && image_two_value[i][j + 1] == IMG_BLACK && image_two_value[i][j + 2] == IMG_BLACK)//白黑黑,找到右边界{right_border = j;Right_Lost_Flag[i] = 0; //右丢线数组,丢线置1,不丢线置0break;}else if(j>=MT9V03X_W-1-2)//没找到右边界,把屏幕最右赋值给右边界{right_border = j;Right_Lost_Flag[i] = 1; //右丢线数组,丢线置1,不丢线置0break;}}for (j = Longest_White_Column_Left[1]; j >= 0 + 2; j--)//往左边扫描{//从最下面一行,访问到我的有效是视野行if (image_two_value[i][j] ==IMG_WHITE && image_two_value[i][j - 1] == IMG_BLACK && image_two_value[i][j - 2] == IMG_BLACK)//黑黑白认为到达左边界{left_border = j;Left_Lost_Flag[i] = 0; //左丢线数组,丢线置1,不丢线置0break;}else if(j<=0+2){left_border = j;//找到头都没找到边,就把屏幕最左右当做边界Left_Lost_Flag[i] = 1; //左丢线数组,丢线置1,不丢线置0break;}}Left_Line [i] = left_border; //左边线线数组Right_Line[i] = right_border; //右边线线数组}需要注意的是,在对(i,j)坐标进行边界判断时,会访问到他相邻的(i,j+1),(i,j+2)或者(i,j-1),(i,j-2),故需要对j的范围进行限制,限制在(0+2,MT9V03X_W- 1- 2)这个范围中,保证访问时不会数组越界。
还有一点,最长白列Search_Stop_Line代表着图像视野,但是只代表视野的长度,当进行坐标访问时,需要进行换算。换算方式为:MT9V03X_H-Search_Stop_Line;
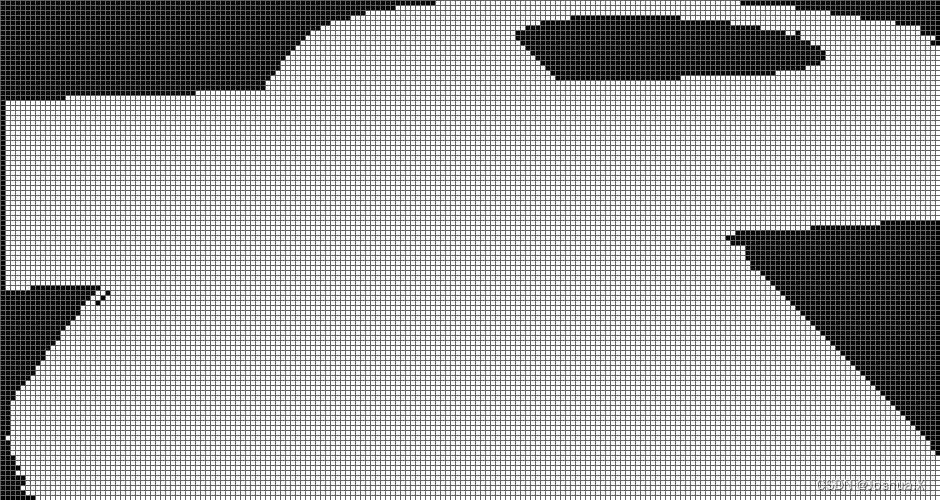
例如,下方图视野为满,也就是我图像高70,,那我们访问到视野顶端时,需要计算
MT9V03X_H-Search_Stop_Line=70-70=0;
也就是我可以从第MT9V03X_H-1行访问到第0行,这都是我的有效视野。
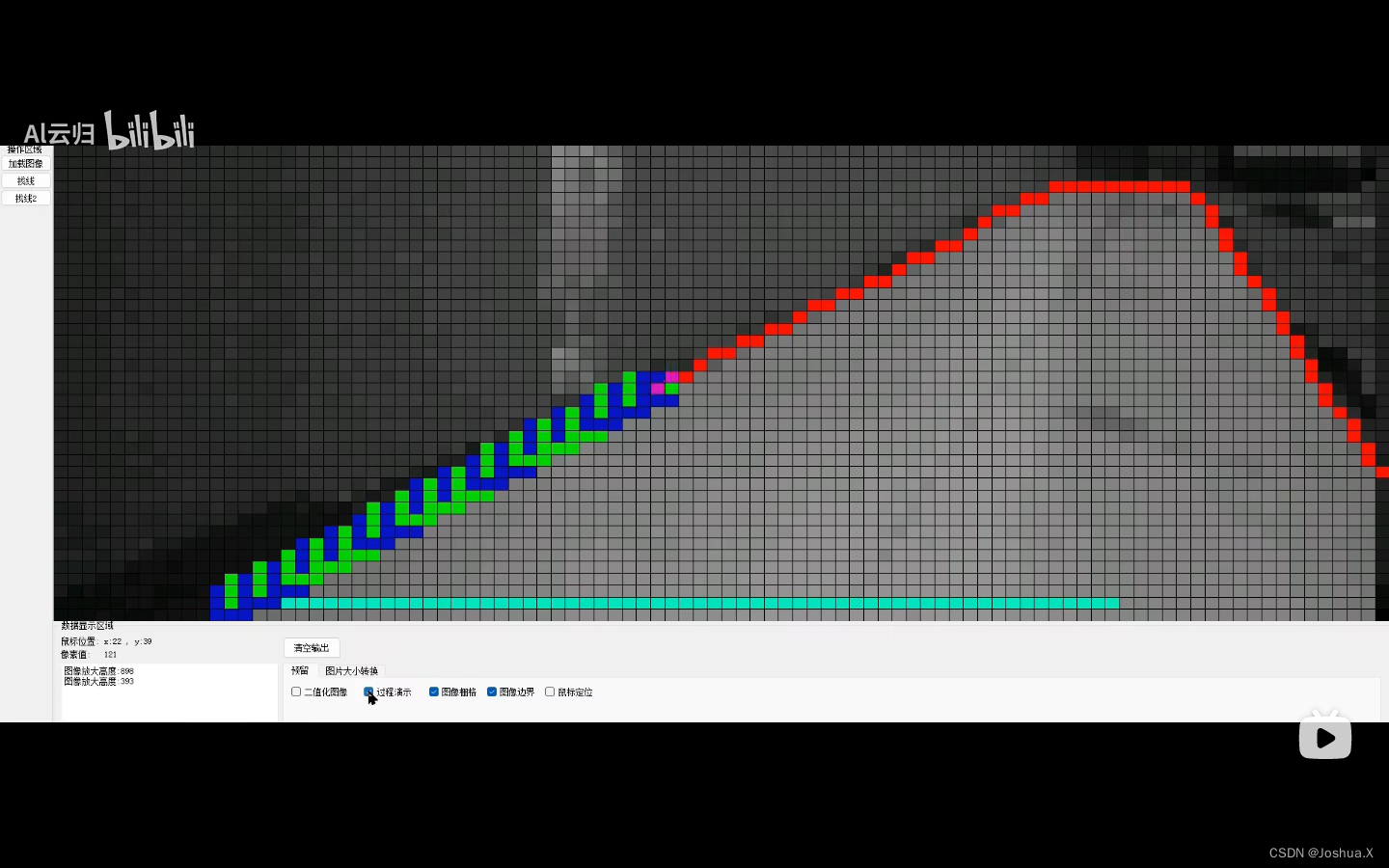
搜索边界到搜所截止行就不往下搜也是有原因的,就像下面的图,在截止行外仍让有图像,如果一直搜下去,不知道他会找到什么地方作为边界,这样影响后续控制。

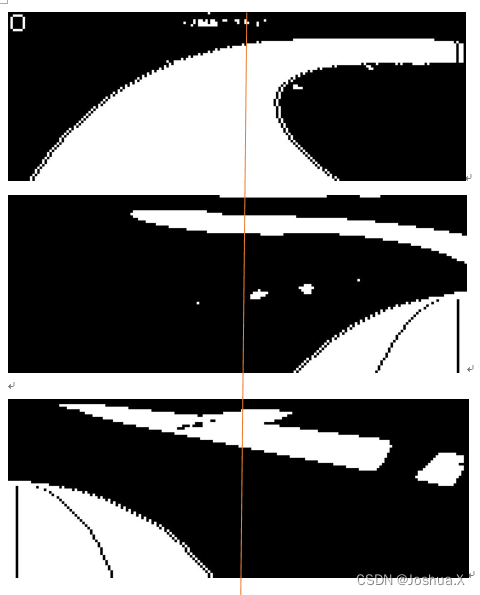
有效视野是区别赛道信息有效性的一大判断条件。当然,最长白列巡线也有一定的bug。看下图。

这是一张弯道斜入十字的图,由于最长白列出现的位置比较巧,边界就找错了,出现了边界线往回跑的现象,这就需要我们对最长白列出现的位置进行限制。
int start_column=20;//最长白列的搜索区间int end_column=MT9V03X_W-20;这里就限制住了最长白列不会出现在图像的两边20像素之内,防止了上述情况的发生。当然,具体情况需要根据车子实际视野来定。
这里简单说一下,(双)最长白列为什么要将双用括号括起来。
因为双最长白列使用效果和单最长白列一样,只是减少了一点点左右巡边的时间。如果只找一边的最长白列,那就从最长白列向左找左边界,向右找右边界。最长白列的长度仍是搜索截止行。
完整参考代码如下
/*-------------------------------------------------------------------------------------------------------------------@brief 双最长白列巡线@param null@return nullSample Longest_White_Column_Left();@note 最长白列巡线,寻找初始边界,丢线,最长白列等基础元素,后续读取这些变量来进行赛道识别
-------------------------------------------------------------------------------------------------------------------*/
void Longest_White_Column()//最长白列巡线
{int i, j;int start_column=20;//最长白列的搜索区间int end_column=MT9V03X_W-20;int left_border = 0, right_border = 0;//临时存储赛道位置Longest_White_Column_Left[0] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Left[1] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Right[0] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Longest_White_Column_Right[1] = 0;//最长白列,[0]是最长白列的长度,[1】是第某列Right_Lost_Time = 0; //边界丢线数Left_Lost_Time = 0;Boundry_Start_Left = 0;//第一个非丢线点,常规边界起始点Boundry_Start_Right = 0;Both_Lost_Time = 0;//两边同时丢线数for (i = 0; i <=MT9V03X_H-1; i++)//数据清零{Right_Lost_Flag[i] = 0;Left_Lost_Flag[i] = 0;Left_Line[i] = 0;Right_Line[i] = MT9V03X_W-1;}for(i=0;i<=MT9V03X_W-1;i++){White_Column[i] = 0;}//环岛需要对最长白列范围进行限定//环岛3状态需要改变最长白列寻找范围if(Right_Island_Flag==1)//右环{if(Island_State==3){start_column=40;end_column=MT9V03X_W-20;}}else if(Left_Island_Flag==1)//左环{if(Island_State==3){start_column=20;end_column=MT9V03X_W-40;}}//从左到右,从下往上,遍历全图记录范围内的每一列白点数量for (j =start_column; j<=end_column; j++){for (i = MT9V03X_H - 1; i >= 0; i--){if(image_two_value[i][j] == IMG_BLACK)break;elseWhite_Column[j]++;}}//从左到右找左边最长白列Longest_White_Column_Left[0] =0;for(i=start_column;i<=end_column;i++){if (Longest_White_Column_Left[0] < White_Column[i])//找最长的那一列{Longest_White_Column_Left[0] = White_Column[i];//【0】是白列长度Longest_White_Column_Left[1] = i; //【1】是下标,第j列}}//从右到左找右左边最长白列Longest_White_Column_Right[0] = 0;//【0】是白列长度for(i=end_column;i>=start_column;i--)//从右往左,注意条件,找到左边最长白列位置就可以停了{if (Longest_White_Column_Right[0] < White_Column[i])//找最长的那一列{Longest_White_Column_Right[0] = White_Column[i];//【0】是白列长度Longest_White_Column_Right[1] = i; //【1】是下标,第j列}}Search_Stop_Line = Longest_White_Column_Left[0];//搜索截止行选取左或者右区别不大,他们两个理论上是一样的for (i = MT9V03X_H - 1; i >=MT9V03X_H-Search_Stop_Line; i--)//常规巡线{for (j = Longest_White_Column_Right[1]; j <= MT9V03X_W - 1 - 2; j++){if (image_two_value[i][j] ==IMG_WHITE && image_two_value[i][j + 1] == IMG_BLACK && image_two_value[i][j + 2] == IMG_BLACK)//白黑黑,找到右边界{right_border = j;Right_Lost_Flag[i] = 0; //右丢线数组,丢线置1,不丢线置0break;}else if(j>=MT9V03X_W-1-2)//没找到右边界,把屏幕最右赋值给右边界{right_border = j;Right_Lost_Flag[i] = 1; //右丢线数组,丢线置1,不丢线置0break;}}for (j = Longest_White_Column_Left[1]; j >= 0 + 2; j--)//往左边扫描{if (image_two_value[i][j] ==IMG_WHITE && image_two_value[i][j - 1] == IMG_BLACK && image_two_value[i][j - 2] == IMG_BLACK)//黑黑白认为到达左边界{left_border = j;Left_Lost_Flag[i] = 0; //左丢线数组,丢线置1,不丢线置0break;}else if(j<=0+2){left_border = j;//找到头都没找到边,就把屏幕最左右当做边界Left_Lost_Flag[i] = 1; //左丢线数组,丢线置1,不丢线置0break;}}Left_Line [i] = left_border; //左边线线数组Right_Line[i] = right_border; //右边线线数组}for (i = MT9V03X_H - 1; i >= 0; i--)//赛道数据初步分析{if (Left_Lost_Flag[i] == 1)//单边丢线数Left_Lost_Time++;if (Right_Lost_Flag[i] == 1)Right_Lost_Time++;if (Left_Lost_Flag[i] == 1 && Right_Lost_Flag[i] == 1)//双边丢线数Both_Lost_Time++;if (Boundry_Start_Left == 0 && Left_Lost_Flag[i] != 1)//记录第一个非丢线点,边界起始点Boundry_Start_Left = i;if (Boundry_Start_Right == 0 && Right_Lost_Flag[i] != 1)Boundry_Start_Right = i;Road_Wide[i]=Right_Line[i]-Left_Line[i];}//环岛3状态改变边界,看情况而定,我认为理论上的最优情况是不需要这些处理的if(Island_State==3||Island_State==4){if(Right_Island_Flag==1)//右环{for (i = MT9V03X_H - 1; i >= 0; i--)//右边直接写在边上{Right_Line[i]=MT9V03X_W-1;}}else if(Left_Island_Flag==1)//左环{for (i = MT9V03X_H - 1; i >= 0; i--)//左边直接写在边上{Left_Line[i]=0; //右边线线数组}}}//debug使用,屏幕显示相关参数
// ips200_showint16(0,0, Longest_White_Column_Right[0]);//【0】是白列长度
// ips200_showint16(0,1, Longest_White_Column_Right[1]);//【1】是下标,第j列)
// ips200_showint16(0,2, Longest_White_Column_Left[0]);//【0】是白列长度
// ips200_showint16(0,3, Longest_White_Column_Left[1]);//【1】是下标,第j列)
}2.常规巡线
常规巡线是我17届智能车比赛时使用的,核心想法与最长白列差不多,起始点的处理有所不同,这里简单讲下。
首先在图像最下一行进行判断搜索起始点,默认是图像中间,如果是图像中间是黑的话,那就判断图像左1/4处是不是黑,右1/4处是不是黑,这样找到一个搜索起始点,从起始点开始,向左向右进行判断。同样的“黑黑白”白点是左边界,“白黑黑”白点是右边界,左加右除以2,计算出当前的中线位置,下一次的起始点是这一次的中点,就这样断搜下去,也叫“中线继承法”,同样可以找到边线。
这也是一种可行的办法,参考代码如下:
/** 从下往上巡线,从中巡间往两边线*/
void Find_Boundry(void)//从中间往两边搜索中线
{int i,j;static int left_border=0,right_border=0,mid=MT9V03X_W/2,last_mid=MT9V03X_W/2;right_line_lost=0;left_line_lost=0;.//起始点合理性判断if(image_two_value[MT9V03X_H-1][MT9V03X_W/2]==0x00)//屏幕中线是黑的话{if(image_two_value[MT9V03X_H-1][MT9V03X_W/4]==0xff)//看看左1/4是不是白{last_mid=MT9V03X_W/4;//更改搜索起始点}else if(image_two_value[MT9V03X_H-1][MT9V03X_W/4*3]==0xff)//看看右1/4是不是白{last_mid=MT9V03X_W/4*3;//更改搜索起始点}}//开始巡边for(i=MT9V03X_H-1;i>=0;i--)//从最底下往上扫描{for(j=last_mid;j<MT9V03X_W-3;j++)//往右扫描{if(image_two_value[i][j]==0xff&&image_two_value[i][j+1]==0x00&&image_two_value[i][j+2]==0x00)//白黑黑,找到右边界{right_border=j;Right_Lost_Flag[i]=0; //右丢线数组,丢线置1,不丢线置0break;//跳出,找到本行边界就没必要循环下去了}else{right_border=j;//没找到右边界,把屏幕最右赋值给右边界Right_Lost_Flag[i]=1; //右丢线数组,丢线置1,不丢线置0}}right_line_lost+=Right_Lost_Flag[i];for(j=last_mid;j>1;j--)//往左边扫描{if(image_two_value[i][j]==0xff&&image_two_value[i][j-1]==0x00&&image_two_value[i][j-2]==0x00)//黑黑白认为到达左边界{left_border=j;Left_Lost_Flag[i]=0; //左丢线数组,丢线置1,不丢线置0break;//跳出,找到本行边界就没必要循环下去了}else{left_border=j;//找到头都没找到边,就把屏幕最左右当做边界Left_Lost_Flag[i]=1; //左丢线数组,丢线置1,不丢线置0}}left_line_lost+=Left_Lost_Flag[i];mid=(left_border+right_border)/2;//中线坐标last_mid=mid;//中线查找开始点,方便下一次找中线Left_Line [i]= left_border ; //左边线线数组Right_Line[i]= right_border; //右边线线数组Road_Wide[i]=Right_Line[i]-Left_Line [i];}
}3.八邻域
八邻域呢是智能车处理的一大热门话题,他可以以超快的速度处理出图像的边缘,我称之为“爬线”,因为只要起始点正确,他可以沿着图像的边缘(赛道边缘)快速爬出整条边界。
其中有灰度八邻域,二值化八邻域,核心原理都差不多,以当前点为中心,开一个九宫格,去看附近的格子变化趋势如何,找到下一个点,再以下一个点为中心,开九宫格,判断在下一个点的情况,如此类推,沿着边线爬完全图。
具体的操作,建议参考b站大佬:AI云归,他开源了很多资料,大家可以前去学习
但是八邻域在智能车方面需要有不少限制,不然可能会爬到某个怪圈里面,把自己死卡,出不来。
4.逆透视
逆透视是好多大佬使用的方法,核心原理就是坐标系的转化,让一张图片从智能车视角,转化为上帝视角,这样有好处,赛道还原度可以非常高,并且在一些角点,弯道,可以进行角度,甚至是曲率的计算,非常有利于元素的处理。

关于逆透视方面,需要借助MATLAB工具进行标定,测量等,前期需要做一些准备工作,但是一但标定完成,使用起来效果还是很高端的。
关于逆透视方面,大家可以参考上交AuTop开源,以及b站大佬:__苏格拉没有底___,他们的开源,讲的很多很好。
5.迷宫法
迷宫法巡线是上交开源出的一套巡线法,在开源之后广受好评,大家也可参考
第16届智能车智能视觉组-上海交通大学AuTop战队开源汇总 - 知乎
二、赛道基本信息
1.标准赛道宽度
const uint8 Standard_Road_Wide[MT9V03X_H]=//标准赛宽
{ 10, 12, 14, 16, 18, 20, 22, 24, 26, 28,30, 32, 34, 36, 38, 40, 42, 44, 46, 48,50, 52, 54, 56, 58, 60, 62, 64, 66, 68,70, 72, 74, 76, 78, 80, 82, 84, 86, 88,90, 92, 94, 96, 98,100,102,104,106,108,110,112,114,116,118,120,122,124,126,128,130,132,134,136,138,140,142,144,146,148};这个是数据是在摄像头高度,角度都确定了之后,在长直道实测出来的数据,赛道每一行的理论赛宽。在后期坡道,横断,环岛的一些阶段,都非常有用。
宽度是用右边界-左边界得到的,单位是像素,需要各位实测得到。
2.边界分析数据
for (i = MT9V03X_H - 1; i >= 0; i--)//赛道数据初步分析{if (Left_Lost_Flag[i] == 1)//单边丢线数Left_Lost_Time++;if (Right_Lost_Flag[i] == 1)Right_Lost_Time++;if (Left_Lost_Flag[i] == 1 && Right_Lost_Flag[i] == 1)//双边丢线数Both_Lost_Time++;if (Boundry_Start_Left == 0 && Left_Lost_Flag[i] != 1)//记录第一个非丢线点,边界起始点Boundry_Start_Left = i;if (Boundry_Start_Right == 0 && Right_Lost_Flag[i] != 1)Boundry_Start_Right = i;Road_Wide[i]=Right_Line[i]-Left_Line[i];}赛道信息是我们识别元素的关键,主要包括
- 左/右边界数组
- 左/右丢线数组,左/右丢线数
- 双边丢线数
- 左/右边界起始点
- 赛道截止行
- 当前赛道宽度
这些信息都是初步分析得出的数据,在不同的排列组合判断后,还需要根据这些信息进一步去获取角点判断,连续性判断,单调性判断,电磁信号判断等,在进行补线,划线等措施,去判断和处理不同的素。
注:上面并没有计算中线,我因为得到了左右边线,随时都可以用(左+右)/2得到中线。我是在控制方向的时候才去计算中线。
到这里,我们就成果的获取到了一帧图像的大部分数据,下一章将讲简单的控制,车子就可以跑起来了。
希望能够帮助到一些人。
本人菜鸡一只,各位大佬发现问题欢迎留言指出。
qq:2296449414
这篇关于第18届全国大学生智能汽车竞赛四轮车开源讲解【3】--边线提取的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






