本文主要是介绍在全志H616核桃派上实现USB摄像头的OpenCV颜色检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
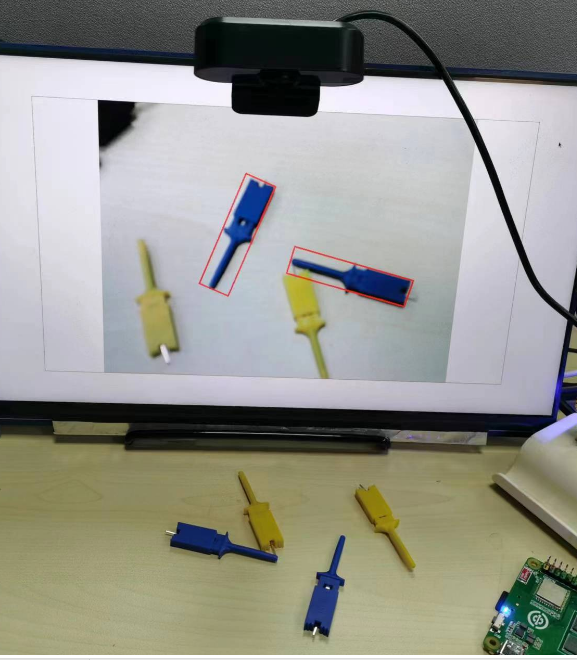
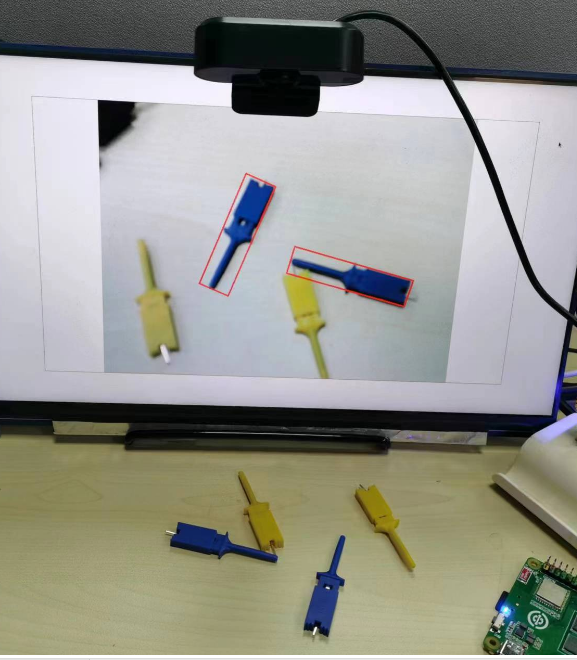
在给核桃派开发板用OpenCV读取图像并显示到pyqt5的窗口上并加入颜色检测功能,尝试将图像中所有蓝色的东西都用一个框标记出来。
颜色检测核心api
按照惯例,先要介绍一下opencv中常用的hsv像素格式。颜色还是那个颜色,只是描述颜色用的参数变了。h代表色调,s代表饱和度,v代表明度,比使用rgb格式更方便计算与思考。

opencv中也提供了将rgb bgr等转为hsv图片的api:
hsvImage = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
cv2.inRange,给定一个要检测的hsv颜色范围,返回一张黑白图。将hsv值在该范围内的像素点全部变为白色,不在的则为黑色。
import numpy as np
hsv_upper=np.array([125, 250, 250])
hsv_lower=np.array([95, 40, 40])
grayImage = cv2.inRange(hsvImage, hsv_lower, hsv_upper) # 颜色二值化
findContours,传入黑白图像,寻找所有轮廓。返回两个列表,contours里是找到的所有轮廓,hierarchy是那些轮廓之间的相对位置关系
contours, hierarchy = cv2.findContours(grayImage, cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
minAreaRect,传入一个轮廓,计算最小外接矩形
# 画最小外接矩形
for cts in contours :rect = cv2.minAreaRect(cts)
drawContours, 绘制轮廓
box = np.int0(cv2.boxPoints(rect)) cv2.drawContours(rgbImage, [box], 0, (255, 0, 0), 2)
基本测试代码
import cv2
from ui_main import Ui_MainWindow
import numpy as npimport PyQt5
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from PyQt5.QtWidgets import *# 修正qt的plugin路径,因为某些程序(cv2)会将其改到其他路径
import os
os.environ['QT_QPA_PLATFORM_PLUGIN_PATH'] = os.path.dirname(PyQt5.__file__)#【可选代码】允许Thonny远程运行
import os
os.environ["DISPLAY"] = ":0.0"#【建议代码】允许终端通过ctrl+c中断窗口,方便调试
import signal
signal.signal(signal.SIGINT, signal.SIG_DFL)
timer = QTimer()
timer.start(100) # You may change this if you wish.
timer.timeout.connect(lambda: None) # Let the interpreter run each 100 ms# 线程类
class Work(QThread):signal_update_label = pyqtSignal(QPixmap)label:QLabeldef sloat_update_label( self, pixmap:QPixmap):self.label.setPixmap(pixmap)def run(self):print("label.width()=", self.label.width())print("label.height()=", self.label.height())self.signal_update_label.connect(self.sloat_update_label)cap = cv2.VideoCapture(1)while True:ret, frame = cap.read()if ret:# 颜色转换rgbImage = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)hsvImage = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)# 二值化hsv_upper=np.array([125, 250, 250])hsv_lower=np.array([95, 40, 40])grayImage = cv2.inRange(hsvImage, hsv_lower, hsv_upper) # 颜色二值化# 查找并绘制最小外接矩形contours, hierarchy = cv2.findContours(grayImage, cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)for cts in contours :rect = cv2.minAreaRect(cts) box = np.int0(cv2.boxPoints(rect)) cv2.drawContours(rgbImage, [box], 0, (255, 0, 0), 2)
由于摄像头拍出来的噪点很多,而物体由于本身材质反光导致拍出来也有一些部分的颜色变了。所以实际应用时需要对图像进行一些滤波模糊化处理。或是直接对生成后的黑白图像进行一定膨胀与收缩。
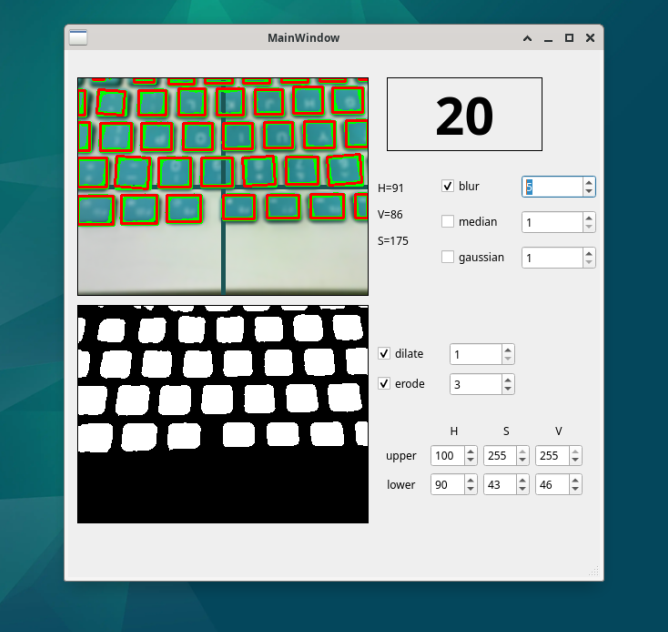
再把各个参数做成pyqt窗口的选项,查看各项搭配后的效果,快速找到合适的参数选择。
# 图像缩小并转换颜色格式
frame = cv2.resize(frame, (320, 240))
rgbImage = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
h, w, ch = rgbImage.shape# 图像模糊
if self.blur.flag :rgbImage = cv2.blur(rgbImage,(self.blur.num, self.blur.num))
if self.median.flag :rgbImage = cv2.medianBlur(rgbImage,self.median.num)
if self.gaussian.flag :rgbImage = cv2.GaussianBlur(rgbImage, (self.gaussian.num, self.gaussian.num), 0)# 二值化
hsvImage = cv2.cvtColor(rgbImage, cv2.COLOR_RGB2HSV)
grayImage = cv2.inRange(hsvImage, np.array([self.hl.num, self.sl.num, self.vl.num]), np.array([self.hu.num, self.su.num, self.vu.num])) # 颜色二值化# 图像操作
if self.dilate.flag :grayImage = cv2.dilate(grayImage, np.ones((self.dilate.num, self.dilate.num), dtype=np.uint8), 1) # 膨胀
if self.erode.flag :grayImage = cv2.erode(grayImage, np.ones((self.erode.num, self.erode.num), dtype=np.uint8), 1) # 腐蚀# 获取中心点的颜色,画上十字光标
height, width = rgbImage.shape[:2]
center_y, center_x = height // 2, width // 2
color = tuple(map(int, rgbImage[center_y, center_x, :]))
cv2.line(rgbImage, (center_x, 0), (center_x, height-1), color, 3)
cv2.line(rgbImage, (0, center_y), (width-1, center_y), color, 3)contours, hierarchy = cv2.findContours(grayImage, cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)这篇关于在全志H616核桃派上实现USB摄像头的OpenCV颜色检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






