本文主要是介绍Linux驱动学习—IIC总线之FT5X06触摸驱动实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、实现触摸坐标值上报
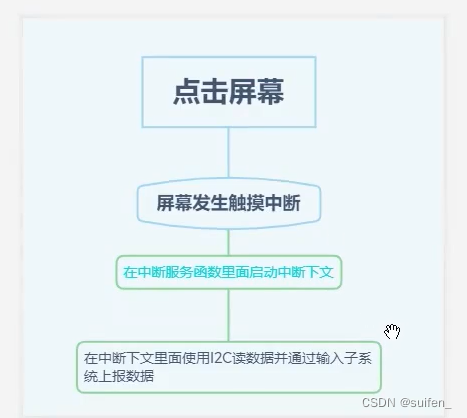
流程图:
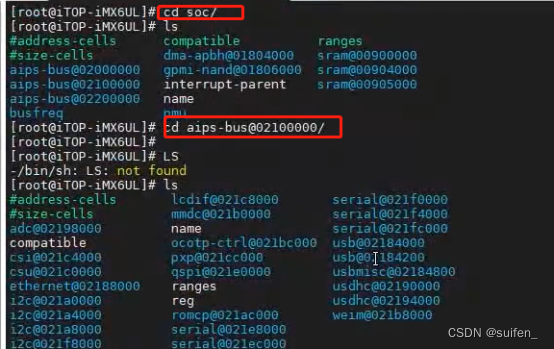
设备树如下:

触摸设备对应的设备树节点是:
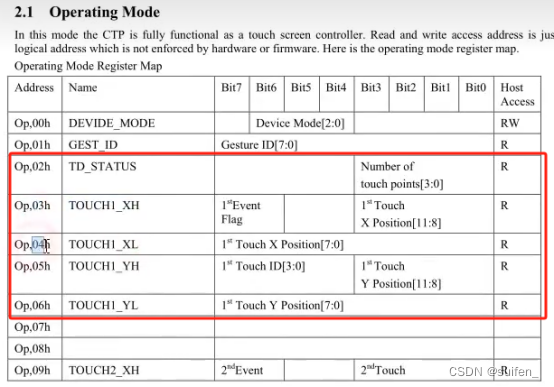
读取坐标的寄存器:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/i2c.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#include <linux/interrupt.h>
#include <linux/of_irq.h>
#include <linux/input.h>
#include <linux/wprkqueue.h>
#define DEVICE_MODE 0x00
#define ID_G_MODE 0Xa4
int irq;
static struct device_node *ft5x06_device_node;
static struct input_dev *ft5x06_dev;
static struct i2c_client *ft5x06_client;
static const struct i2c_device_id ft5x06_id_ts[] = {{"xxx",0},
};
static const struct of_device_id ft5x06_id[] = {{.compatible = "edt,edt-ft5306", 0},{.compatible = "edt,edt-ft5x06", 0},{.compatible = "edt,edt-ft5406", 0},
};
static int ft5x06_read_reg(u8 reg_addr);
static void ft5x06_write_reg(u8 reg_addr, u8 data, u8 len);
static void ft5x06_func(struct work_struct *work);
DECLARE_WORK(ft5x06_work, ft5x06_func);
static void ft5x06_read_reg(u8 reg_addr)
{u8 data;struct i2c_msg msgs[] {//第一个数据包,写[0] = {.addr = ft5x06_client->addr,.flags = 0,.len = sizeof(reg_addr),.buf = ®_addr,},//第二个数据包,读[1] = {.addr = ft5x06_client->addr,.flags = 0,.len = sizeof(data),.buf = &data,},};i2c_transfer(ft5x06_client->adapter, msgs, 2);return data;
}
static void ft5x06_write_reg(u8 reg_addr, u8 data, u8 len)
{u8 buff[256];struct i2c_msg msgs[] = {[0] = {.addr = ft5x06_client->addr,.flags = 0,.len = len+1,.buf = buff,}};buff[0] = reg_addr;memcpy(&buff[1], &data, len);i2c_transfer(ft5x06_client->adapter, msgs, 1);
}
static void ft5x06_func(struct work_struct *work)
{int TOUCH1_XH,TOUCH1_XL,x;int TOUCH1_YH,TOUCH1_YL,y;int TD_STATUS;//读取 TOUCH1_XH 的值TOUCH1_XH = ft5x06_read_reg(0x03);//读取 TOUCH1_XL 的值TOUCH1_XL = ft5x06_read_reg(0x04);//获取x的坐标值x = ( (TOUCH1_XH << 8) | TOUCH1_XL ) & 0x0fff;//读取 TOUCH1_YH 的值TOUCH1_YH = ft5x06_read_reg(0x05);//读取 TOUCH1_YL 的值TOUCH1_YL = ft5x06_read_reg(0x06);//获取y的坐标值y = ( (TOUCH1_YH << 8) | TOUCH1_YH ) & 0x0fff;//获取寄存器TD_STATUS的值TD_STATUS = ft5x06_read_reg(0x02);TD_STATUS = TD_STATUS & 0xf;if (TD_STATUS == 0) {//判断有没有手指按下,如果有的化就上报按下去的事件input_report_key(ft5x06_dev, BTN_TOUCH, 0);input_sync(ft5x06_dev);} else {input_report_key(ft5x06_dev, BTN_TOUCH, 1);input_report_key(ft5x06_dev, ABS_X, x);input_report_key(ft5x06_dev, ABS_Y, y);input_sync(ft5x06_dev);}
}
static irqreturn_t ft5x06_handler(int irq, void *args)
{printk("This is ft5x06_handler\n");schedule_work(&ft5x06_work);return IRQ_HANDLED;
}
int ft5x06_probe(struct i2c_client *i2c_client, const struct i2c_device_id *id)
{int ret;int ft5x05_irq_gpio;int ft5x05_reset_gpio;printk("This is ft5x06_probe\n");ft5x06_client = client;//因为我们再别的函数里面用到这个client,所以我们要把他复制出来。
//获得触摸芯片的节点ft5x06_device_node = of_find_node_by_path("/soc/aips-bus@02100000/i2c@021a4000/edt-ft5");if(NULL == ft5x06_device_node){printk("of_find_node_by_path is error\n");return -1;}printk("ft5x06_device_node is %s\n", ft5x06_device_node->name);//获得中断引脚的GPIO标号ft5x05_irq_gpio = of_get_named_gpio(ft5x06_device_node, "irq-gpios", 0);if (ft5x05_irq_gpio < 0) {printk("of_get_named_gpio IS ERROR\n ");return -2;}//获得复位引脚的GPIO标号ft5x05_reset_gpio = of_get_named_gpio(ft5x06_device_node, "reset-gpios", 0);if (ft5x05_reset_gpio < 0) {printk("of_get_named_gpio IS ERROR\n ");return -3;} printk("ft5x05_irq_gpio is %d\n ",ft5x05_irq_gpio);printk("ft5x05_reset_gpio is %d\n ",ft5x05_reset_gpio);//申请中断引脚gpio_free(ft5x05_irq_gpio);ret = gpio_request(ft5x05_irq_gpio, "irq_gpio");if (ret < 0) {printk("gpio_request IS ERROR\n ");return -4;} //申请复位引脚gpio_free(ft5x05_reset_gpio);ret = gpio_request(ft5x05_reset_gpio, "reset_gpio");if (ret < 0) {printk("gpio_request IS ERROR\n ");return -5;} //把中断引脚设置为输入gpio_direction_input(ft5x05_irq_gpio);//设置复位引脚的方向为输出,先输出低电平,然后输出高电平,停止复位gpio_direction_output(ft5x05_reset_gpio, 0);msleep(5);gpio_set_value(ft5x05_reset_gpio, 1);//获得中断号irq = gpio_to_irq(ft5x05_irq_gpio);//申请中断ret = request_irq(irq, ft5x06_handler, IRQ_TYPE_EDGE_FALLING|IRQF_ONSHOT, "ft5x06_irq", NULL);if (ret < 0) {printk("request_irq IS ERROR\n ");goto error_request_irq;;} //设置工作模式为正常模式ft5x06_write_reg(DEVICE_MODE, 0, 1);ft5x06_write_reg(ID_G_MODE, 1, 1);ft5x06_dev = input_allocate_device();ft5x06_dev->name = "ft5x06_input_test";__set_bit(EV_KEY, ft5x06_dev->evbit);//支持按键事件__set_bit(EV_ABS, ft5x06_dev->evbit);//支持绝对坐标事件__set_bit(BIN_TOUCH, ft5x06_dev->keybit);//支持按键检测__set_bit(ABS_X, ft5x06_dev->absbit);//支持X坐标__set_bit(ABS_Y, ft5x06_dev->absbit);//支持Y坐标//__set_bit(ABS_PRESSURE, ft5x06_dev->keybit);//支持压力检测input_set_abs_params(ft5x06_dev, ABS_X, 0, 1024, 0, 0);//设置X坐标值的范围input_set_abs_params(ft5x06_dev, ABS_Y, 0, 600, 0, 0);//设置y坐标值的范围//input_set_abs_params(ft5x06_dev, ABS_PRESSURE, 0, 255, 0, 0);//设置压力值的范围ret = input_register_device(ft5x06_dev);if (ret < 0) {printk("request_irq IS ERROR\n ");goto error_input_register);} return 0;error_request_irq:free_irq(irq, NULL);return ret;
error_input_register: free_irq(irq, NULL);input_unregister_device(ft5x06_dev);input_free_device(ft5x06_dev);return ret;
}
int ft5x06_remove(struct i2c_client *i2c_client)
{return 0;
}
static struct i2c_driver ft5x06_driver = {.driver = {.owner = YHIS_MODULE,.name = "ft5x06_test",.of_match_table = ft5x06_id,},.probe = ft5x06_probe,.remove = ft5x06_remove,.id_table = ft5x06_pid_ts
};
static int ft5x06_driver_init(void)
{int ret;ret = i2c_add_driver(&ft5x06_driver);if (ret < 0) {printk("i2c_add_driver is error\n");return ret;}printk("This is ft5x06_driver_init\n");return 0;
}
static void ft5x06_driver_exit(void)
{free_irq(irq, NULL);input_unregister_device(ft5x06_dev);input_free_device(ft5x06_dev);i2c_del_driver(&ft5x06_driver);printk("This is ft5x06_driver_exit\n");
}
module_init(ft5x06_driver_init);
module_exit(ft5x06_driver_exit);
MODULE_LICENSE("GPL");编译加载驱动:

![]()

点击一下屏幕,hexdump /dev/input/event4会打印相应信息。
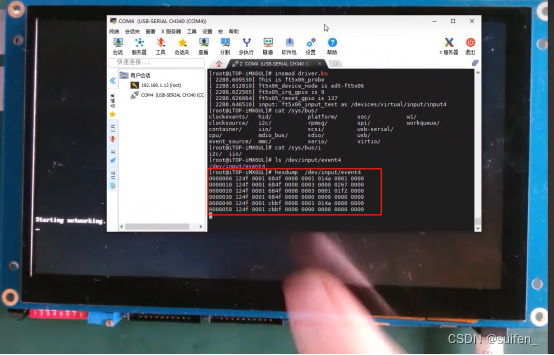
分析如下:
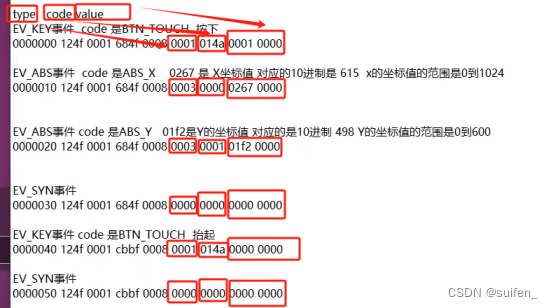
2、如何确定上报的坐标值是否正确呢?
<1>点击屏幕左上角,hexdump /dev/input/event4会打印相应信息,分析如下:

<2>点击屏幕右上角,hexdump /dev/input/event4会打印相应信息,分析如下:

<3>点击屏幕左下角,hexdump /dev/input/event4会打印相应信息,分析如下:

<4>点击屏幕右下角,hexdump /dev/input/event4会打印相应信息,分析如下:

<5>点击屏幕中间,hexdump /dev/input/event4会打印相应信息,分析如下:

综上,可以看出基本证明坐标上报是无误的。
3、电阻屏触摸校准实验
只有电阻屏幕需要校准,电容屏是不需要的。

这篇关于Linux驱动学习—IIC总线之FT5X06触摸驱动实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









