本文主要是介绍Livox-Mid-360 固态激光雷达ROS格式数据分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言:
Livox-Mid-360 官方采用livox_ros_driver2ROS功能包发布ROS格式的数据,livox_ros_driver2可以把Livox原始雷达数据转化成ROS格式并以话题的形式发布出去。
下面列举一些雷达的基本概念:
- 点云帧:雷达驱动每次向外发送的一组雷达数据集合称为一帧雷达数据。如果帧率是10HZ,那么每帧点云数据是100ms内雷达扫描的点云集合。每发布一次toptic就是一帧。注意:一帧激光点云数据并不一定是雷达旋转一周所扫描的点云数据。
- 点云帧发布频率:1s内雷达发送的帧数,比如10HZ表示1s内雷达发送10帧的点云数据,即每100ms发送一帧点云数据。
- 扫描频率:雷达的扫描频率一般是针对机械式旋转激光雷达而言的,指1s内雷达旋转的圈数。固态激光雷达的扫描方式和旋转式激光雷达不同,不同产品、厂商有不同的方式。
1.livox_ros_driver2
livox_ros_driver2包中用于处理livox-mid-360的接口有rviz_MID360.launch文件,负责连接到 MID360 LiDAR 设备、发布 pointcloud2 格式数据、自动加载 rviz。
Livox ros 2内部主要参数配置说明:
- publish_freq:设置点云发布,浮点数据类型的频率,推荐值为5.0、10.0、20.0、50.0等。最大发布频率为 100.0 Hz。
- multi_topic:如果 LiDAR 设备有独立的主题来发布点云数据 0 -- 所有 LiDAR 设备都使用相同的主题发布点云数据 1 -- 每个 LiDAR 设备都有自己的主题来发布点云数据
- xfer_format:设置点云格式,0 -- Livox pointcloud2(PointXYZRTLT)点云格式, 1 -- Livox 自定义点云格式, 2 -- PCL 库中的标准点云 2 (pcl :: PointXYZI) 点云格式。
2.点云数据:
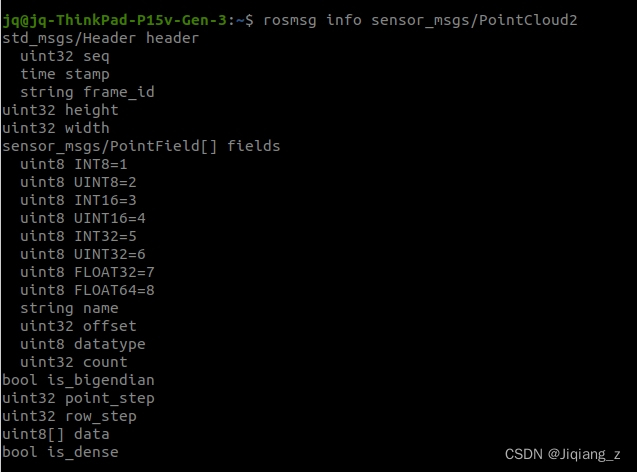
查看livox_ros_driver2发布出的话题,/livox/lidar 的消息类型为:sensor_msgs/PointCloud2,sensor_msgs/PointCloud2消息的内容为下(注意:这是一帧点云的消息类型,不是每个点云的信息):
其中每个参数的意义参考以下文章:
sensor_msgs/PointCloud2雷达数据信息-CSDN博客
2.1 PointCloud2数据结构
sensor_msgs/PointCloud2 Message
File: sensor_msgs/PointCloud2.msg
Raw Message Definition
# 该消息包含一个n维点的集合,它可能包含额外的信息,如法线、强度等。点数据以二进制blob的形式存储,其布局由“fields”数组的内容描述。# 点云数据可以组织为2d(类似图像)或1d(无序)。以二维图像组织的点云可以由立体或飞行时间等相机深度传感器产生。# 传感器数据采集时间,坐标坐标系ID (3d点)。
Header headeruint32 seqtime stamp # topic发布的系统时间 unit:秒string frame_id # topic发布的系统时间 unit:纳秒# 点云的二维结构。如果云是无序的,高度为1,宽度是点云的长度(个数)。
uint32 height #也就是线数,固态激光雷达点云不分线数,所以是1
uint32 width# 描述通道及其在二进制数据块中的布局。
PointField[] fields # 每个点的数据类型,不同枚举值对应不同类型bool is_bigendian # 字节的排列顺序
uint32 point_step # 单点的数据字节步长
uint32 row_step # 一行数据的字节步长
uint8[] data # 存储点云的数组,总长度为row_step*heightbool is_dense # 如果没有非法数据点为真
2.2 fields数据结构
sensor_msgs/PointField Message
File: sensor_msgs/PointField.msg
Raw Message Definition
# 该消息以PointCloud2消息格式保存一个 点 条目的描述。
PointCloud2 message format.
uint8 INT8 = 1
uint8 UINT8 = 2
uint8 INT16 = 3
uint8 UINT16 = 4
uint8 INT32 = 5
uint8 UINT32 = 6
uint8 FLOAT32 = 7
uint8 FLOAT64 = 8string name # 名
uint32 offset # 从点结构开始的偏移量
uint8 datatype # 枚举数据类型
uint32 count # 有多少个元素
2.3 实际数据分析
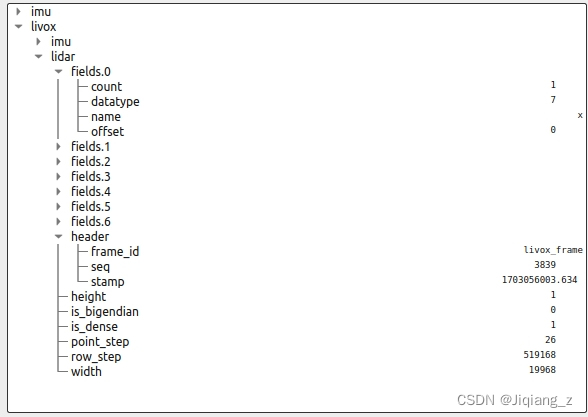
header: // 点云的头信息seq: 4873stamp: // 时间戳secs: 595nsecs: 698295140frame_id: "livox_frame"
height: 1 // 如果cloud 是无序的 height 是 1
width: 9984 // 点云的长度(点云中点的个数)
fields: // 该消息以PointCloud2消息格式保存一个 点 条目的描述。- name: "x" // “x”坐标信息offset: 0 // 从点结构开始的偏移量datatype: 7 // 枚举数据类型 FLOAT32 count: 1 // 域中有多少个元素- name: "y" // “y”坐标信息offset: 4datatype: 7 // FLOAT32 占4个字节count: 1- name: "z" // “z”坐标信息offset: 8datatype: 7 // FLOAT32 占4个字节count: 1- name: "intensity" // 反射强度坐标信息offset: 12datatype: 7 // FLOAT32 占4个字节count: 1- name: "tag" // 回波信息offset: 16datatype: 2 // UINT8 占1个字节count: 1- name: "line"offset: 17datatype: 2 // UINT8 占1个字节count: 1
is_bigendian: False // 数据存储方式,包括大端与小端,具体解释见后文参考链接
point_step: 18 // 一个点占的字节数
row_step: 179712 // 一行的长度占用的字节数
data:[省略]
is_dense: True // 没有非法数据点
---
这篇关于Livox-Mid-360 固态激光雷达ROS格式数据分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




