本文主要是介绍Ubuntu 20.04使用Livox Mid-360,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参考文章:
Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客
一:Livox mid 360驱动安装与测试
前言:
Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。
1. 安装Livox-SDK2
参照官方教程:GitHub - Livox-SDK/Livox-SDK2: Drivers for receiving LiDAR data and controlling lidar, support Lidar HAP and Mid-360.
2.在ROS空间下编译安装FAST_LIO源码
2.1. 创建ROS1工程
mkdir livox_ws/src
2.2 在src文件夹中下载livox_ros_driver2源码
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
3.编译工程
在工程目录的livox_ws/src/livox_ros_driver2使用下面指令编译,不要直接使用catkin_make.
cd src/livox_ros_driver2
./build.sh ROS14. 修改Livox mid360的配置
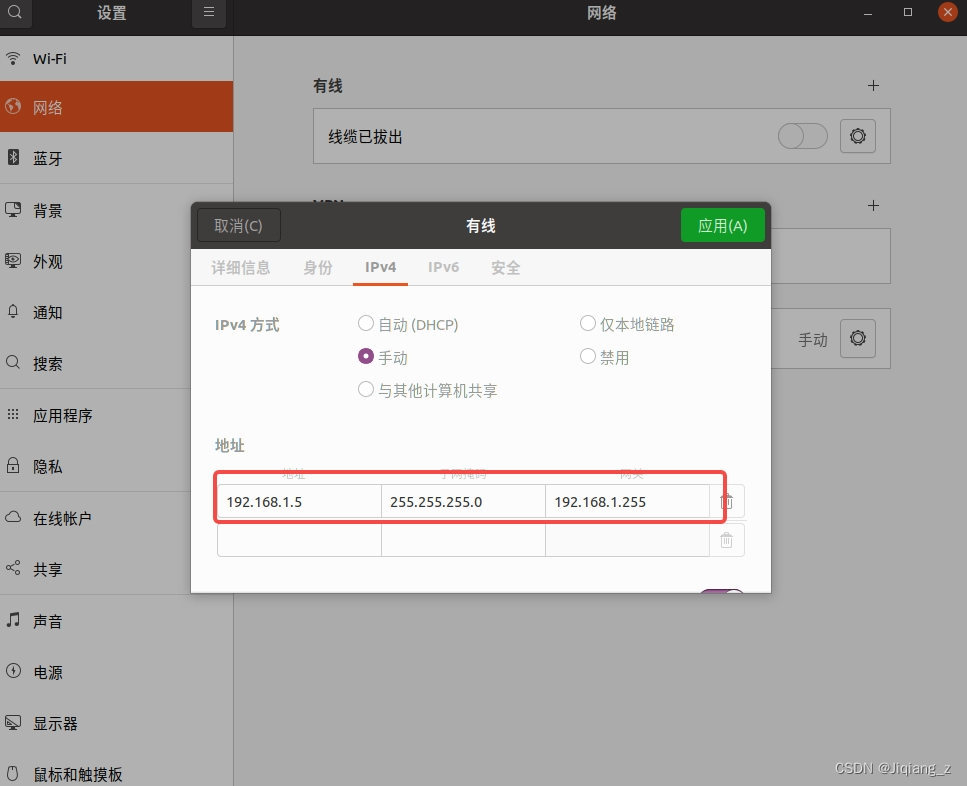
4.1. 修改电脑IP地址
建议电脑ip修改为192.168.1.5,否则需要修改下面的配置文件中对应的电脑ip,DNS地址写不写无所谓。(这里是网络有线那里的ip地址)
4.2. 修改Livox mid360 IP
获取Livox mid360 IP的方式有两种;
4.2.1 通过出厂编号获取
打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。Livox mid360的IP是出厂后已经固定下来的,看它上面的二维码下面的 SN 码 ,后两个数字前面再加一个1,便是其对应的ip。(例如 SN 码后两位数字为26,那它对应的ip就是192.168.1.126)。
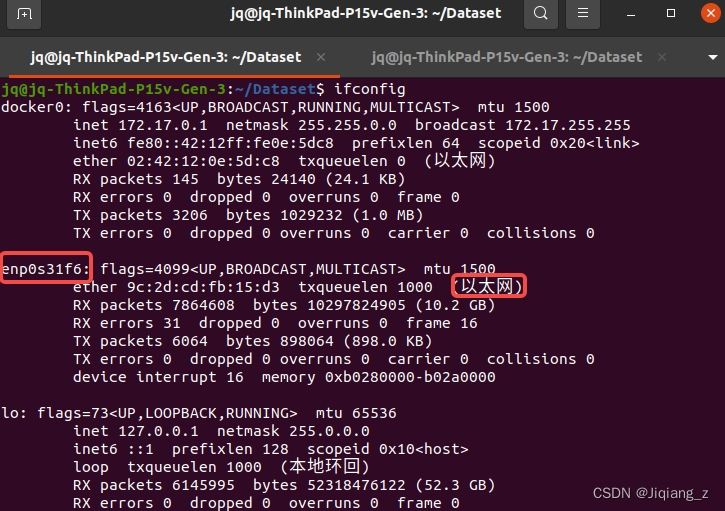
4.2.2 通过wireshark工具读取雷达端口ip
查看接受雷达数据的网口:
ifconfig
使用以下命令安装wireshark
sudo apt-get install wireshark
运行wireshark工具
sudo wireshark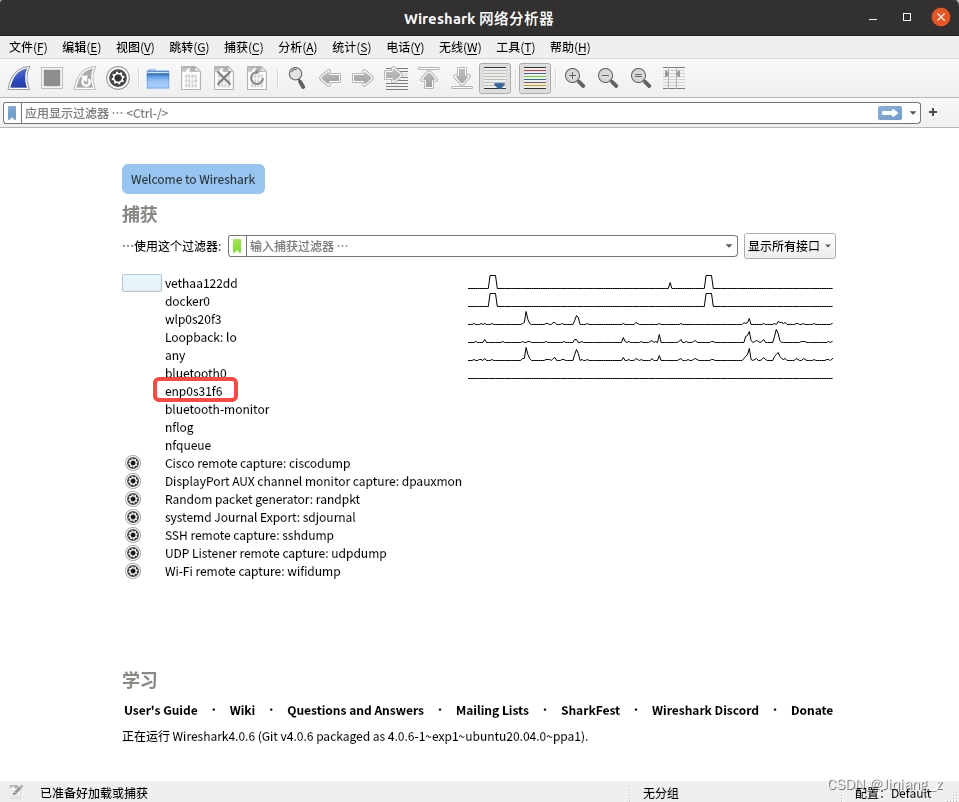
 修改配置文件,打开打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。
修改配置文件,打开打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。
{"lidar_summary_info" : {"lidar_type": 8},"MID360": {"lidar_net_info" : {"cmd_data_port": 56100,"push_msg_port": 56200,"point_data_port": 56300,"imu_data_port": 56400,"log_data_port": 56500},"host_net_info" : {"cmd_data_ip" : "192.168.1.5", # <-这里和修改后的电脑ip一致"cmd_data_port": 56101,"push_msg_ip": "192.168.1.5", # <-这里和修改后的电脑ip一致"push_msg_port": 56201,"point_data_ip": "192.168.1.5", # <-这里和修改后的电脑ip一致"point_data_port": 56301,"imu_data_ip" : "192.168.1.5", # <-这里和修改后的电脑ip一致"imu_data_port": 56401,"log_data_ip" : "","log_data_port": 56501}},"lidar_configs" : [{"ip" : "192.168.1.126", # <-这里是Livox mid360的ip"pcl_data_type" : 1,"pattern_mode" : 0,"extrinsic_parameter" : {"roll": 0.0,"pitch": 0.0,"yaw": 0.0,"x": 0,"y": 0,"z": 0}}]
}
5.运行测试
打开两个终端,分别运行:
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
也可以在终端对于话题数据进行打印
rostoptic list
rostoptic echo /livox/lidar运行成功截图如下:
 二:使用Livox mid360 录制数据包
二:使用Livox mid360 录制数据包
前言:录制rosbag包之前,需要先使各种传感器处于工作状态,例如Livox mid360需要启动先前安装好的驱动。此外还要确保每个传感器的时间戳同步。
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
1. 话题录制
1.1 录制所有发布出来的话题,此时默认将话题保存在一个以当时时间戳命名的文件夹中:
rosbag record -a
1.2 录制指定话题
rosbag record /topic1 /topic12 -o out.bag
2. 话题回放
2.1 基本回放
rosbag play <your bagfile name>
2.2 等待一定时间之后发布bag文件中的内容
rosbag play <your bagfile name> -d <delay time>
2.3按一定频率回放,-r选项用来设定消息发布速率,如下面命令则表示以3倍原始速率发布话题
rosbag play -r 3 <your bagfile name>2.4 回放指定话题
rosbag play <your bagfile name> --topics <topics>2.5 创建一个除了/tf消息的新包
rosbag filter file.bag file-no-tf.bag "topic != '/tf'"2.6 重映射topic信息(将out.bag中point_cloud转为velodyne_points)
rosbag play out.bag /point_cloud:=/velodyne_points2.7 播放bag并重新生成一个新包
rosbag record -O mahao_1.bag /velodyne_points2.8 查看bag中对应topic的frame_id
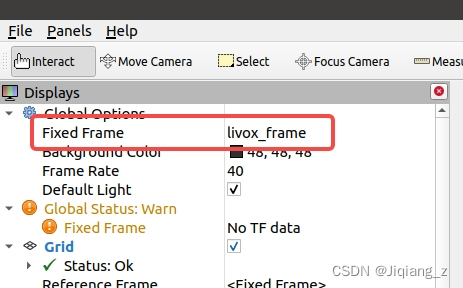
rostopic echo /topic | grep frame_id注:当播放rosbag包,想要在rviz中查看时,需要将rviz中的Fixed Frame换成bag中对应topic的frame_id
3.数据包截取
在使用rosbag录包的时候,我们有时候只需包中的某一段时间,因此就有必要按时间截取rosbag包。
3.1 在rosbag包目录下启动终端
3.2 按时间截取
rosbag filter 原始包名.bag 截取后的包名.bag "t.to_sec() > 开始时间 and t.to_sec() < 结束时间"Exemple:
rosbag filter lidar_zed4.bag lidar_zed4_filter.bag "t.to_sec() > 1641196460.608130 and t.to_sec() < 1641196485.7"注意:时间是Bag Time,可以在回放rosbag包的时候看到。
这篇关于Ubuntu 20.04使用Livox Mid-360的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






