本文主要是介绍开源飞控ACFLY:ADRC离散系统最速控制综合函数的理解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摘自:https://blog.csdn.net/weixin_40767422/article/details/86709848

ACFLY原创文章,转载请说明出处https://blog.csdn.net/weixin_40767422/article/details/86709848
ADRC相关论文资料请加q群:180319060下载
最近在看韩京清教授的自抗扰论文,里面关于最速控制综合函数fhan的离散公式让我有点懵圈,于是又找到了一篇相关的论文http://www.doc88.com/p-606277652526.html,这篇论文里详细推导了离 散系统真正的最速控制综合函数 fsun(),寻思着把学习心得写一下,挺有意思的(不能让我一个人懵圈)。。。

一,先看连续化的快速最优控制系统,主要是上图中最下面那条公式,这是什么意思?其实不难,你可以把等号左边的X1看作位置,X2看作速度,那么X1求导就是X2,(X1头上加一点就代表导数),那么X2的导数自然是加速度了,这是二阶积分系统。sgn函数我就不赘述了,r代表加速度。sgn函数括号里,x1代表当前位置,V(t)代表目标位置(下图有点错),x2代表当前速度。这个公式解决的是
从一点到一点,先做匀加速运动再做匀减速运动并要求到达目标位置的速度为0,时间最短,问你什么时候应该加速什么时候应该减速。
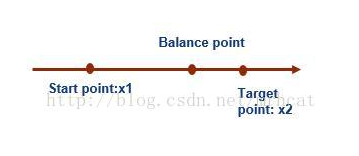
x2|x2|/2r就是初中运动公式 ,指当前速度匀减速到0所需路长,x1-v(t)就是当前位置到目标位置的距离,只不过是负的,两者相加如果等于0,那么证明刚好到了平衡点,下一刻就应该减速了。大于小于0大家可以自己判断应该减速还是加速。
,指当前速度匀减速到0所需路长,x1-v(t)就是当前位置到目标位置的距离,只不过是负的,两者相加如果等于0,那么证明刚好到了平衡点,下一刻就应该减速了。大于小于0大家可以自己判断应该减速还是加速。
二,接下来重头戏看看离散化的快速最优控制系统,一堆公式。。。

1 这篇文章是相对于二阶离散系统的,我们仍然可以把x1(k)看作位置,把x(2)看作速度,h为积分步长,u(k)为控制量:加速度,u(k)<=r意思是控制量最大值为r,是人为调整的参数。离散和连续都是为了实现最速控制,所用时间最少,且到达目标位置时速度为0,即无超调,这是公式推导的基本要求,务必记住。
![]()

2.知道初始状态x1[0],x2[0],k步之后可推导出x1[k]和x2[k]的状态,化成矩阵形式如上图(可自己动手推导验证)。系统达到稳态是指达到目标位置,到达目标位置速度x2必须为0,x1即目标位置也设为0是为了方便计算系统初始值的表达式,假设初始位置x1[0]=1,目标位置是x1=3,现在变换一下,把目标位置的点设为=0,点还是那个点,只是坐标变化一下,那么初始位置也做相应变化x1[0]=-2;式4也很容易推导,最好自己动手推导一下。为什么要得到这个式子,这个式子是k步之内达到原点(即目标位置)所有初值和控制量的关系,初值是已知的,我们要反推出最佳控制量u[k]使得k步之内无超调最快达到目标。

3.可分3种情况反推出最优控制量u[k]。这是1步之内到达原点(即目标位置)的情况,把k=1代入式4便可得出式5,有两个点a-1,a+1相当于假设一步步长为1,当初始位置在1的时候可以一步走到原点(即目标位置),初始位置在-1的时候也可以一步走到原点(即目标位置),只不过方向相反而已。



4.这是第二种情况,k<=2内达到原点,与上面类似,不多说,都是为了反推出最优控制量。



5.这是第3种情况,k>=3到达原点的情况。我刚开始看的时候就有一个疑问:给出最速轨迹线a后为什么还要给出轨迹b,后来我想明白了。
当我们的初始位置在最速轨迹线的时候当然最好,我们可以全速u[k]=r前进,足够靠近原点两步之内就能到达原点时,u[k]由情况2决定。
不然始终加速度最大为r,到达原点后会产生超调,就像一个人跑步,你到达终点前始终全速前进,到了终点由于速度不为0肯定还会向前移动,不符合文章开始说的无超调要求。
那当初始位置不在最速轨迹线上呢,那肯定得想方设法回到最速轨迹线上。假设初始位置在b-轨迹线的上方,要想回到最速轨迹线上,肯定得减速(这个不会看不出来吧),而且还是以最大加速度-r减速,不然怎么符合最速控制要求呢。
如果恰好减速到b-轨迹线上最好(请看上图文字b轨迹线代表什么),再以-r减速一步便可到达最速轨迹线Gbest线上。那如果减速到a线和b线之间呢,再以-r全力减速肯定到达不了Gbest线上,这就是为什么给出b轨迹线的原因。那当系统状态变量在a线和b线之间该如何求出最佳控制量?如下图:



6式23就是所求最优控制量,可知还需求出k,k是整数,k’是为了求出k。 fix() 为取整函数. 。

至此,便可得到fsun函数的表达式。
最后总结一下,
-
当初始位置在b轨迹线上或以上或以下,控制量为|r|
-
当初始位置在a轨迹线和b轨迹线之间,想办法回到最速轨迹线
-
在最速轨迹线上,当k>=3时,控制量为|r|,当k<=2时,调整控制量使得到达原点的速度为0无超调。
这篇关于开源飞控ACFLY:ADRC离散系统最速控制综合函数的理解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


