本文主要是介绍px30 buildroot系统开发环境的搭建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
产品特性
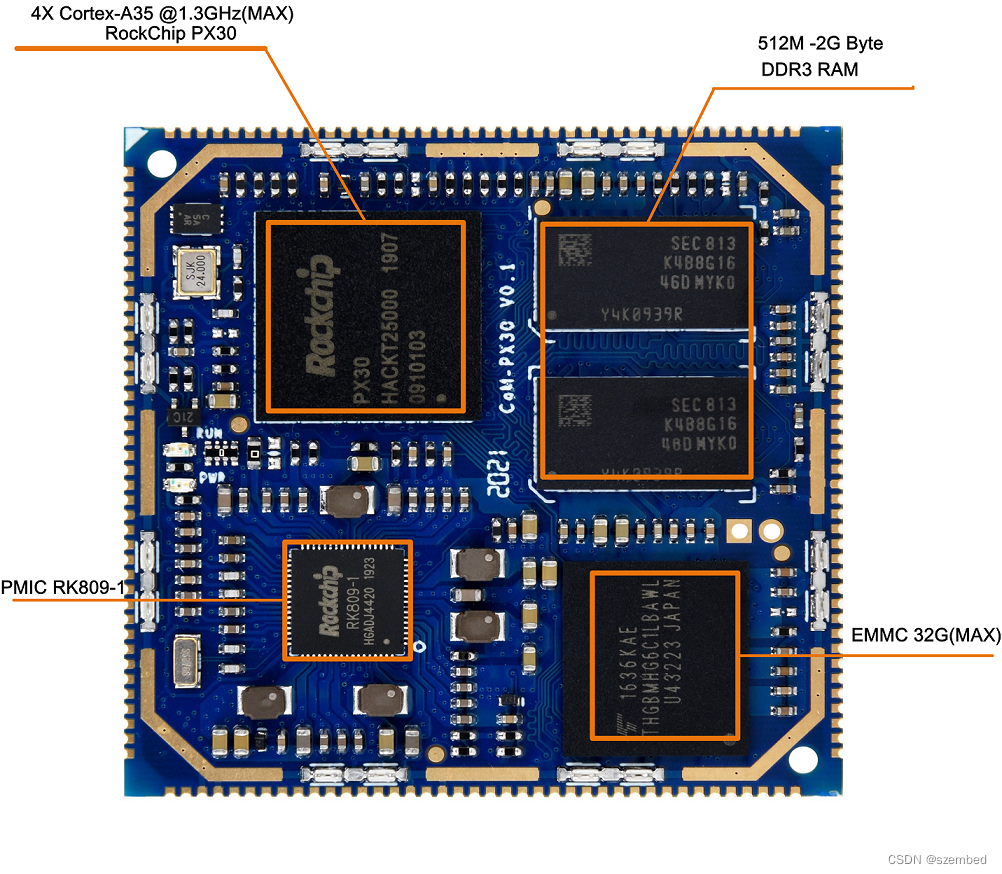
- 采用Rockchip公司Cortex-A35四核PX30处理器,运行最高速度为1.3GHZ;
- 支持Mali-G31GPU,支持OpenGL ES3.2, Vulkan 1.0, OpenCL 2.0
- 支持1080P 视频编码,支持H.264,VP8;多格式1080P 60fps视频解码 (H.265,H.264,VC-1, MPEG-1/2/4, VP8)
- 支持双屏异显;支持RGB888/LVDS/MIPI-DSI,分辨率最高1920x1080;
- 支持SDIO3.0,USB2.0 HOST&OTG,4路I2C,6路UART,2路SPI,8路PWM
- 支持512-2G Bytes DDR3 SDRAM;
- 支持EMMC 4G-32G大容量电子盘,可启动;
- 可定制宽温产品,替换AM335X
- 稳定的操作系统的支持,可预装Android8.0或者LINUX 4.4;
- 超小体积,邮票孔设计160pins, 尺寸为:45*45MM
CoM-PX30|RK3358的部件组成图:
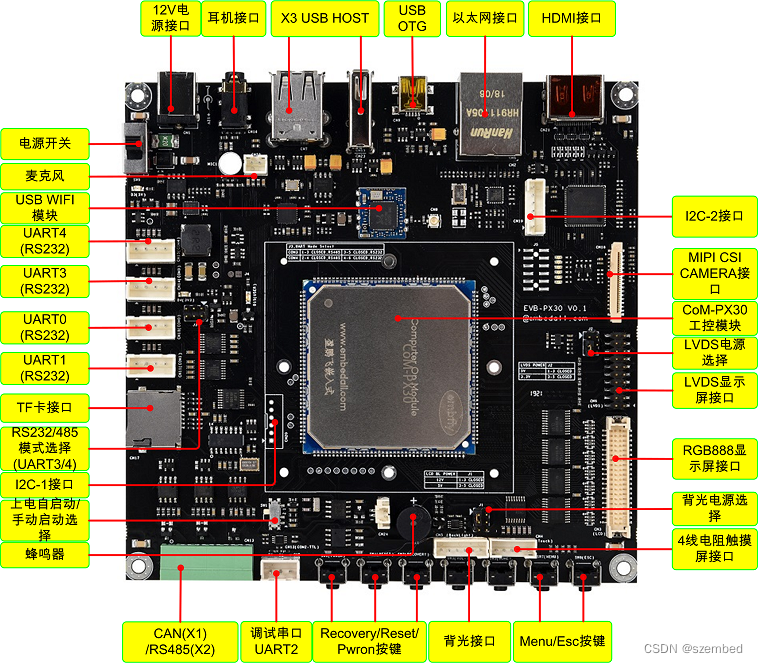
EVB-PX30简单介绍和功能图:
工业宽温设计,工作更稳定:
CoM-PX30 隶属于盈鹏飞嵌入式Computer-on-Module (CoM)系列,该产品集成了四核 Cortex-A35 1.3GHz(MAX) PX30 处理器,稳定运行Android 8.0/Ubuntu 20.04/Linux 4.4。 CoM-PX30提供了3.3V I/O接口,可提供宽温的工业组件,运行于条件恶劣的工业现场!
提供开发套件,可快速应用
开发套件中包括主板、各种LCD配件,提供开发工具以及API函数、参考代码、详细的使用手册,让客户快速上手。
1、buildroot系统开发环境搭建
1.1、安装操作系统
硬件平台:台式主机,x86_64架构
操作系统版本:Ubuntu 16.04.5 LTS (内核版本:GNU/Linux 4.4.0-131-generic x86_64)
详细安装步骤请参考《虚拟机安装ubuntu指导手册》,如果条件允许,建议直接在实体主机上安装ubuntu操作系统,因为虚拟机不能发挥最大的性能。
1.2、下载buildroot软件包
从服务器下载buildroot代码在ubuntu终端下运行:git clone git@192.168.0.252:/git/com-px30/evb-x301-linux.git下载buildroot代码如下图1-1所示:
 图1-1
图1-1
注:代码目前仅保存在内网服务器。
1.3、安装依赖文件
安装软件包:
sudo apt-get install expect-dev repo git-core gitk git-gui gcc-arm-linux-gnueabihf u-boot-tools device-tree-compiler \gcc-aarch64-linux-gnu mtools parted libudev-dev libusb-1.0-0-dev python-linaro-image-tools \linaro-image-tools autoconf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make \binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio python unzip rsync file bc wget \libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync openssh-client \subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev texinfo \liblz4-tool genext2fs lib32stdc++6 expect
依赖库安装完成后如下图1-2所示:
图1-2
交叉编译链、环境变量等交叉编译链位于SDK的rk3399-xpc3399-linux目录,环境变量写入脚本,在执行编译脚本(或命令)时,会调用脚本设置相应的环境变量。
1.4、安装cmake
cmake 主要有两大功能:
⑴、配置和生成各大平台的工程(vs的vcxproj,Qt的Pro):比如设置输出目录,设置编译对象的debug后缀,设置源码在工程中的那个文件夹(Filter),配置需要依赖的第三方的头文件目录,库目录等属性。
⑵、生成makefile文件:计算机编译源文件的时候是一条指令一条指令的发送给编译器执行的,这样效率很低下,所以就产生了一种文件,把所有的命令写到一个文件中,这个文件就是makefile。
cmake生成了这个makeFile之后,各大平台的编译器都会拿到这个makeFile然后解析它。将他的命令解析出来一条一条执行。sudo apt-get install cmake安装过程如下图1-3所示:

图1-3
1.5、编译buildroot
自动编译,切换到evb-x301-linux目录下;
# ./build.sh lunch
# ./build.sh all
注:
① 编译前,先导出环境变量。执行./build.sh lunch ,弹出配置菜单,编译EVB-PX30,选择BoardConfig_evbx301.mk 配置前序号。如图1-4所示:

图1-4
② 该操作自动编译u-boot、kernel、buildroot、recovery,并最终生成固件,输出文件在/rk3399-xpc3399-linux/rockdev/目录下,如图1-5所示:

图1-5
1.5.1、单步编译u-boot
# ./build.sh uboot
u-boot固件编译生成的固件uboot.img,trust.img在u-boot目录下,如下图1-6所示:

图1-6
1.5.2单步编译kernel:
# ./build.sh kernel
编译生成的镜像boot.img、kernel.img、resource.img在kernel目录下,boot.img是内核镜像集成有kernel.img和resource.img两个镜像文件,只需烧写boot.img镜像。如下图1-7所示:

图1-7
固件支持LVDS屏的分辨率为800*600,如需要点亮不同分辨率的LVDS显示屏,修改dts文件即可,再重新编译kernel。
dts在kernel/arch/arm64/boot/dts/rockchip/目录下,px30-eac-lcd-lvds-1024x768.dtsi 与px30-eac-lcd-lvds-800x600.dtsi两各dtsi分别支持g150xtn06p0与g121sn01v4两个显示屏。若要点其它分辨率的LVDS显示屏,新增dtsi并在px30-evb-x301-linux.dts中包含,注意同一时刻只能包含一个LVDS屏的dtsi。

图1-8
1.5.3、单步编译rootfs(buildroot)
rootfs默认编译的是buildroot,如何打包ubuntu与Debian见 1.5.4 打包ubuntu镜像 与1.5.5 打包Debian镜像
# ./build.sh rootfs
1.5.4 、打包ubuntu镜像
Ubuntu 16.04镜像包括ubuntu_core.img 与 ubuntu.img ,前者无桌面环境,后者带ubuntu桌面系统。
在编译完成其他部分后(执行build.sh all编译完毕),再打包ubuntu update image,操作如下:
1、复制开发光盘目录下的src/buildroot/Ubuntu 目录到buildroot SDK 根目录下,当中包含ubuntu与ubuntu_core两个镜像,如下图所示:
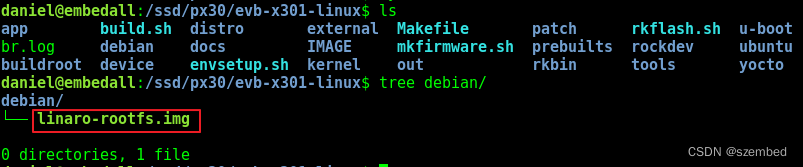
图1-9
这篇关于px30 buildroot系统开发环境的搭建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




