本文主要是介绍RTS核心技术:流场寻路详解(Flow Field Pathfinding),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
RTS里面经常会有很多角色,群体一起寻路到目的地附近,这种寻路是如何实现的,今天给大家详细的讲解基于流场寻路的算法。在本教程中,我将解释向量场寻路及其相对于Dijkstra等传统寻路算法的优势。对Dijkstra算法和势场的基本理解将有助于理解本文,但不是必需的。
对惹,这里有一个游戏开发交流小组,希望大家可以点击进来一起交流一下开发经验呀!
寻路的问题有很多种解决方案,如AStar等, 每种寻路的方案都各有优缺点,大部分的寻路,都是角色要从A点走到B点,然后调用寻路算法找出一条路径出来。通常情况下这样是不会有问题的,但是对于像RTS这种游戏需要做群体寻路,从A点到B点一群角色走过去,如果每个角色都单独寻路,这样性能开销会比较大,所以今天我们为了解决这个问题,介绍基于流场向量的寻路。它的原理是把目标点的流场计算出来,所有移动的目标共用这个流量场。接下来本文讲详细的介绍流场寻路的核心技术与步骤。(本文是将地图基于网格来讲解的,你也可以用到其它的地方,不限于网格)。
基于流场寻路的算法的主要步骤
基于流场寻路的算法主要包含以下三个步骤:
(1) 遍历游戏地图种的每个块,计算出来当前块到目标的距离,称为"Heatmap"热度图;
(2) 为每个地图块,根据Heatmap生成一个向量场,指定了每个块到目标的方向 称为"Vector Field";
(3) 到目的地的每个角色,都共用这个向量场来移动导航到目标点;
生成Heatmap
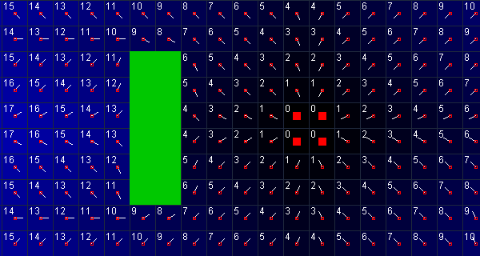
Heatmap 是指从目标点到地图上每个图块的路径距离。路径距离不同于欧几里德距离,它是通过可穿越地形的最短的两点之间距离来计算。如下图,你可以看到从目标点(用红色标记)到地图任意的点(用粉色标记)的路径距离和线性距离之间的差异。不可行走的块以绿色绘制。如图,路径距离(以黄色显示)为9,而线性距离(以浅蓝色显示)约为4.12。每个图块左上角的数字显示由Heatmap生成算法计算出的到目标的路径距离。注意两点之间可能有一个以上的路径距离, 我们只算最短的那个距离。经过算法第一步,我们把地图上的每个块到目的地的最短距离都计算了出来,生成了Heatmap。

Heatmap生成算法是一种 wavefront 算法。它从值为0的目标开始,然后向外流动以填充整个可遍历区域。 wavefront 算法有两个步骤:
(1)从目标开始,并用0的路径距离标记它。
(2)获取每个标记的图块的未标记邻居,并用前一个图块的路径距离+1标记它们。
(3) 标记完所有地图的块后,算法结束。
注: wavefront 算法是在网格上执行广度优先搜索,并存储沿途到达每个块所需的步骤。这种算法有时也称为brushfire算法。
Vector Field 生成
现在已经计算了从每个块到目标的路径距离,我们可以很容易地确定接近目标需要采取的路径。通常计算一次Vector Filed,然后让所有要寻路的对象在运行时引用该Vector Filed。
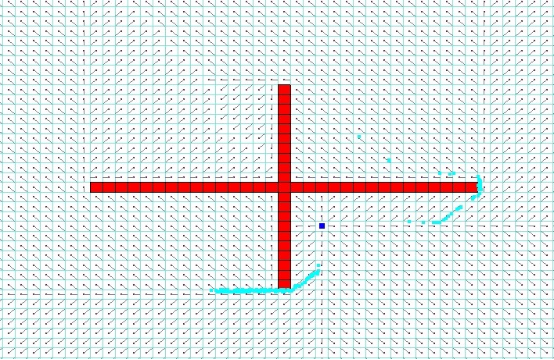
Vector Field 简单地存储了一个向量,该向量指向每个地图块走向目的地的方向(朝向目标)。这里是向量场的可视化,向量从图块的中心沿着最短路径指向目标,形成了一个流场。(红色为原点,白色的线为方向,大体趋势都指向目标点)。

这个向量场里面的每个向量,是通过Heatmap计算出来的,具体的计算Vector向量方式如下:
Vector.x = left_tile.distance - right_tile.distance, 向量x为左边的块-右边的块;
Vector.y = up_tile.distance - down_tile.distance,向量y为上边的块-下面的块;
每个块的distance,就是上面Heatmap种计算出来的数值。
如果当前块的(左/右/上/下)不可行走(障碍物等),则使用与当前块的距离来代替缺少的值。一旦粗略计算了路径向量,就对其进行归一化,以避免以后出现不一致。
角色移动导航
现在矢量场已经计算出来了,计算探路者的运动就很容易了。假设vector_field(x,y)返回我们之前在tile(x,y)处计算的向量,并且移动速度大小一直,则计算tile(x,y)处移动速度的伪代码如下所示:
velocity_vector = vector_field(x, y) * desired_velocity
当我们导航的时候,只要沿着向量方向移动就可以了,很容易就实现了流场移动, 同时多个角色目标寻路的时候,只要计算一次。

如上图,紫色的点,水平不可以移动,上下两个块的距离都是一样的,这样就导致了不唯一性,一半这种情况,我们会随机选着一个方向,这样导致的结果可能就是我们选择的路径不一定是最短的,所以流场寻路又是基于局部最优解的。要解决这样的问题,还有一个好的方法,就是把块分小,降低这样的几率。
当然把块分小,计算量也会增大。
好今天的流场寻路的内容就分享到这里了
博毅创为游戏学院bycwedu.vipwan.cn/promotion_channels/2146264125编辑
这篇关于RTS核心技术:流场寻路详解(Flow Field Pathfinding)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






